


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
THE ANALYSIS OF INTERACTION OF SYSTEM THE OPERATOR – THE WORKING ZONE OF THE OP-ERATOR IN THE TRANS-TAILOR MEANS IN EMERGENCY SITUATIONS

В настоящее время анализ взаимодействия механика-водителя с элементами его рабочей зоны основан на натурных испытаниях. Эксперимент состоит в соударении транспортного средства и находящимся в нем манекеном оператора с внешней абсолютно жесткой средой. Эти испытания дорогостоящие и, кроме того, продолжительны во времени, так как разбиваются автомобили и деформируются манекены с системой датчиков, велики затраты по времени на подготовку материальной части испытаний. В рамках данной статьи рассматривается постановка задачи для анализа взаимодействия механика-водителя с его рабочей зоной при соударении автомобиля с внешней средой, разрабатывается кинематическая схема МВ, процесса взаимодействия автомобиля с сидящим в нем водителем-механиком.
Вопросы, подлежащие рассмотрению и исследованию настоящего динамического процесса:
- математическое описание кинематической схемы оператора как звена со сложной угловой кинематикой;
- материализация кинематической системы силами тяжести и моментами инерции;
- формирование динамической матрицы «оператора»;
- описание рабочей зоны оператора и объекта (транспортного средства с учетом упругостей моментов инерции и т.п., определяемых массами, моментами инерции, параметрами движения объекта); разработка математической модели настоящей системы; разработка открытой системы моделирования и исследования настоящей динамической системы.
Настоящие исследования направлены на создание математической модели и анализ динамической системы: оператор (механик-водитель) - рабочая зона оператора в транспортном средстве в экстремальных ситуациях с целью моделирования процесса и определения динамических воздействий на оператора. На рис.1 представлена укрупненная структурная схема процесса взаимодействия механика-водителя с его рабочей средой в транспортном средстве, на котором приняты следующие обозначения: F1(σ) - возмущение при движении от рельефа σ на ТС;
F2(t) - управляющее воздействие от МВ на ТС через двигатель и движитель и рулевое управление;
Q(t) - деформации корпуса МВ (звеньев системы), причем ![]() .
.
Со стороны объекта на водителя в экстремальных ситуациях (резкие угловые и линейные ускорения) действуют возмущения (усилия). Представим вектор возмущения в виде
![]() .
.
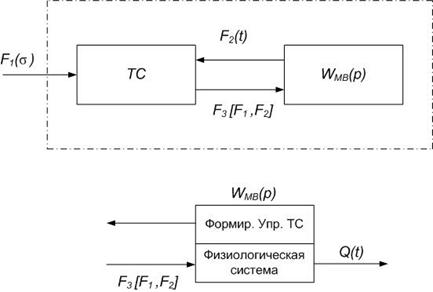
Рис.1. Структурное представление системы механик-водитель - транспортное средство - внешняя среда
Рассмотрим основные параметры тормозной динамики: начальная скорость, замедление (установившееся) при торможении, время и путь торможения, равномерность торможения; сохранение эффективности тормозной системы в течение срока службы ТС, устойчивость в процессе торможения, легкость управления и т.д.
К основным характеристикам можно отнести: зависимости изменения скорости, ускорения и пути от времени торможения; зависимости нарастания замедления от времени торможения; зависимости сил сцепления гусеничного движителя от времени торможения. На рис. 2. в качестве примера приведена тормозная диаграмма ТС при экстренном торможении на сухой дороге с начальной скорости V0.
На тормозной диаграмме выделены три фазы торможения:
I - фаза реакции водителя и выбора зазоров в приводе тормозов;
II - фаза нарастания замедления;
III - фаза установившегося замедления.
Остановочный путь находим по выражению
![]() ,
,
где tP - время реакции водителя (зависит от водителя);
tЗ - время запаздывания привода (выбор зазоров в приводе и тормозном механизме);
tНЗ - время нарастания замедления (зависит от темпа роста тормозных сил на гусеницах);
tУ - время торможения с установившимся замедлением;
V0 - скорость перед торможением.
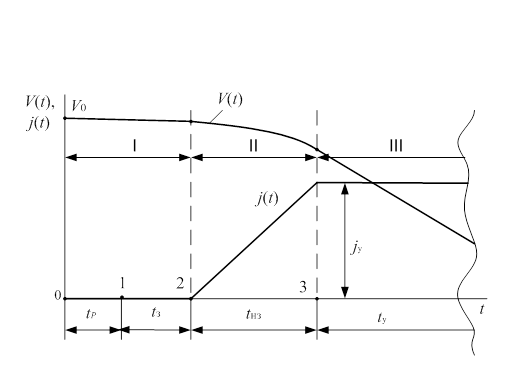
Рис. 2. Тормозная диаграмма ТС на сухом покрытии
Установившееся замедление без блокирования гусениц
![]() ,
,
где ∑RX - тормозные силы на гусеницах;
М - масса ТС.
Первая фаза характеризуется временем реакции водителя и запаздыванием привода. Перемещение машины за этот период (скорость практически постоянная)
![]() .
.
Время реакции водителя находится в пределах 0,1...1,0 с, а время запаздывания зависит от выбора зазора в приводе и выбора зазора между тормозной лентой и барабаном, который должен быть в пределах δ = 1...2 мм и восстанавливается при проведении технического обслуживания или по потребности. При износе накладок зазор δ растет, что приводит к увеличению времени запаздывания и хода поршня бустера гидропневмоцилиндра. В конечном итоге, это приводит к росту перемещения ТС в первой фазе и снижению эффективности в третьей фазе (фаза установившегося замедления). Следует отметить большую трудоемкость восстановления зазора δ при проведении технического обслуживания. Неравномерный износ тормозных лент по бортам приводит к появлению возмущающего момента и, как следствие, уводу или заносу при экстренном торможении.
Анализируя структурную схему тормозной системы, можно выделить три системы:
- рабочая тормозная система (РТС). Все элементы механической части привода, гидро и пневмопривода выполняют заложенные при конструировании функции.
- запасная тормозная система (ЗТС). Система должна обеспечить остановку ТС при предписанном тормозном пути в случае отказа одного из элементов тормозной системы.
- стояночная тормозная система (СТС). СТС имеет общий механический привод с рабочей тормозной системой и используется на стоянке.
Представим механика-водителя в виде многозвенной системы в виде скелетона с кинематической схемой вида рис.3. Механик-водитель представляет собой пространственную механическую систему из N тел (звеньев), соединенных между собой кинематическими парами пятого класса (с одной степенью свободы). Далее под системой будем понимать скелетон механика-водителя, а именно, скелет с силовыми мышцами по соответствующим суставам.
Вектор ![]() является вектором обобщенных координат системы. На первом этапе принимаем следующие допущения:
является вектором обобщенных координат системы. На первом этапе принимаем следующие допущения:
- пренебрегаем силами трения в кинематических парах;
- считаем связи идеальными, голономными и удерживающими;
- звенья абсолютно жесткие.
Тогда описание динамики многозвенной системы может быть получено с помощью уравнений Лагранжа 2-го рода. Для системы тел звенья,
находящейся в потенциальном поле сил тяжести.
F - сила воздействия со стороны ТС на МВ.
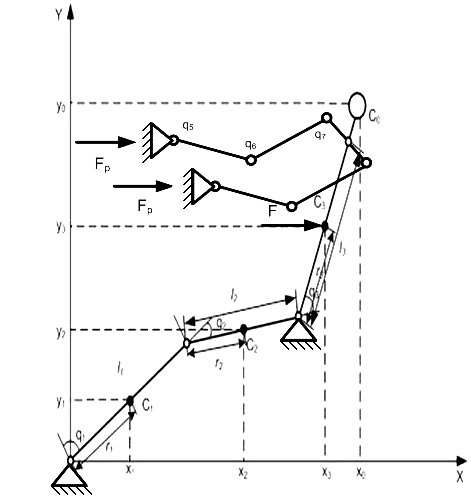
Рис.3. Расчетная схема системы
l0,...,l3 - длина звеньев, С0,...,С3 - центр масс звеньев,q1,...,q7 - обобщенные координаты углов, r0,...,r3 - расстояние от сустава до центра масс звена, Fp - воздействие на МВ от руля ТС
Тогда описание динамики многозвенной системы может быть получено с помощью уравнений Лагранжа 2-го рода. Для системы тел звенья, находящейся в потенциальном поле сил тяжести, уравнения Лагранжа 2-го рода записываются в векторной форме так:
![]()
Здесь φ - вектор обобщенных скоростей ![]() , причем
, причем ![]() ; Т - кинетическая энергия механизма; П - потенциальная энергия системы; М - вектор обобщенных неконсервативных сил (NX1) представляющий собой сумму вектора сил Мпр, передаваемых от исполнительных мышц на конечности скелетона, и вектора внешних сил Мвн. Вычислив потенциальную энергию системы и определив моменты статических сил, обусловленных массой звеньев и массой головы, получим модель системы в виде дифференциальных уравнений Лагранжа 2-го рода:
; Т - кинетическая энергия механизма; П - потенциальная энергия системы; М - вектор обобщенных неконсервативных сил (NX1) представляющий собой сумму вектора сил Мпр, передаваемых от исполнительных мышц на конечности скелетона, и вектора внешних сил Мвн. Вычислив потенциальную энергию системы и определив моменты статических сил, обусловленных массой звеньев и массой головы, получим модель системы в виде дифференциальных уравнений Лагранжа 2-го рода:
Найдем кинетическую энергию механической системы и получим систему уравнений
Для верхних конечностей МВ:
![]()
Для туловища МВ:
Полагаем, что силы Ф1, Ф2 со стороны корпуса ТС на плечевой сустав МВ действуют одновременно и одинаковы. Приведенные силовые воздействия к координатам со стороны ТС обозначены как F1,...,F4. Из полученной системы уравнений видно, что движения звеньев динамически взаимосвязаны. Кроме того, звенья l4, l5 (спинной и шейный позвоночники соответственно) следует рассматривать в одном из двух вариантов: 1) упругое звено с определенной жесткостью и приведенной стрелкой прогиба относительно геометрического центра l(С, F) ; 2) звено, состоящее из набора последовательно соединенных двухшарнирных звеньев. В соответствии с физиологическим строением скелета человека, известно, что позвоночник состоит из 33-34 позвонков: 7 шейных, 12 грудных, 5 поясничных, 5 крестцовых, 4-5 копчиковых.
Кроме того, инерционные характеристики (величины b11, ...,b23 и а11, ...,а44) зависят от обобщенных координат, а, следовательно, от конфигурации механизма. Полученные дифференциальные уравнения являются нелинейными.
В настоящее время проводится моделирование взаимосвязанной системы механик-водитель - транспортное средство. Цель исследований - определение силового воздействия на механика, реакций шарниров и суставов, получение эффекта разрушения шарниров и суставов.
Рецензенты:
- Халатов Е.М., д.т.н., профессор, начальник расчетно-аналитического центра КБ «Арматура» - Филиала ГКНПЦ им. М.В. Хруничева, г. Ковров.
- Гоц А.Н., д.т.н., профессор кафедры тепловых двигателей и энергетических установок Владимирского государственного университета Министерства образования и науки, г. Владимир.
Работа получена 11.11.2011.
Библиографическая ссылка
Кобзев А.А., Шахнин В.А.,, Шмаков В.С. АНАЛИЗ ВЗАИМОДЕЙСТВИЯ СИСТЕМЫ ОПЕРАТОР – РАБОЧАЯ ЗОНА ОПЕРАТОРА В ТРАНСПОРТНОМ СРЕДСТВЕ В ЭКСТРЕННЫХ СИТУАЦИЯХ // Современные проблемы науки и образования. 2011. № 5. ;URL: https://science-education.ru/en/article/view?id=4931 (дата обращения: 10.07.2026).