


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
ADAPTIVE AUTOMATIC CONTROL SYSTEMS WITH TWO REFERENCE MODELS

К подобным системам относятся самонастраивающиеся системы с эталонными моделями (СНС с ЭМ). Исследование СМС с ЭМ показало их большие возможности, однако широкоевнедрение сдерживается трудностью выбора эталонной модели, высокой чувствительностьюнастройки параметров к характеристикам входных сигналов, взаимовлиянием контуров настройки.
С целью преодоления недостатковработы САУ в алгоритм настройки САУ (и в его структуру) в дополнение к эталонной модели вводится вторая эталонная модель,называемаяподстраиваемой моделью (ПМ) [2].С помощью ПМ осуществляется параметрическая идентификация САУ, при которой ПМ подстраивается к настраиваемой САУ. После чего выполняется настройка ПМ к заданным требованиям качества работы САУ с использованиемэталонной модели (ЭМ) специального вида (параметрическое множество ЭМ).
Дуальный характер рассматриваемой схемы настройки САУ,наряду с использованием алгебраических методов анализа САУ, дает возможность с помощью алгоритма самонастройки решить задачу идентификации[6]. Поэтому в статье основное внимание уделяется алгоритму настройки, поскольку аналогичные вычислительные процедуры могут быть использованы и на этапе идентификации динамики объекта.
1. Алгоритм синтеза самонастраивающейся системы автоматического управления с двумя эталонными моделями
Для нахождения области допустимых настроек используются методы нелинейного программирования [1]. Причем в качестве искомых значений коэффициентов данной зоны выбирается точка, в которую вырождается область допустимых настроек при пропорциональном увеличении требований к переходным процессам (например, уменьшение максимально допустимого перерегулирования, уменьшение времени вхождения в трубку точности и т.д.).
Математическое описание ПМ формируется в виде совокупности дробно-рациональных (полиномиальных) выражений от настраиваемыхпараметров, определяющих реакцию САУ на соответствующий тестовый сигнал [3, 4].
Приведенная на рис.1 схема функционирования поясняет взаимодействие частей программы, реализующей алгоритм автомата-настройщика (АН) в его классическом понимании. В соответствии со схемой порядок работы алгоритма следующий.
Тестовый сигнал
поступает на вход настраиваемой системы и подстраиваемой модели.
Параметры ПМ ![]() и
и![]() , равны номинальным значениям соответствующих параметров в
реальной настраиваемой системе. После прохождения тестового сигнала ошибка
рассогласования поступает в блок идентификации.
, равны номинальным значениям соответствующих параметров в
реальной настраиваемой системе. После прохождения тестового сигнала ошибка
рассогласования поступает в блок идентификации.
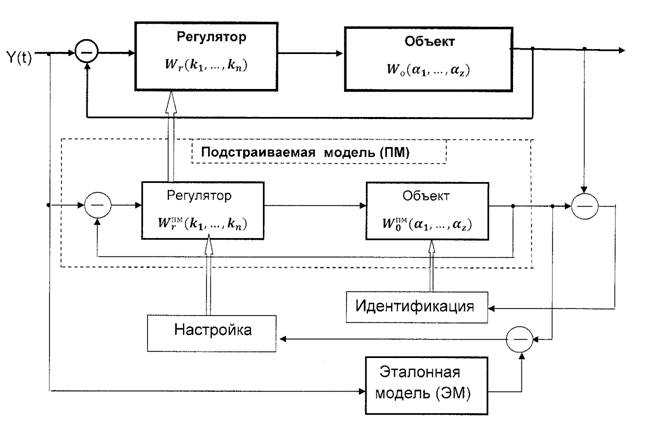
Рис. 1. Функциональная схема автомата-настройщика (АН)
В соответствии с
алгоритмом идентификации в ПМ вычисляются значения параметров ![]() ,которые являются
соответствующими оценками данных параметров в реальной системе [5].
,которые являются
соответствующими оценками данных параметров в реальной системе [5].

В случае, если настраиваемая САУ линейна, достаточно рассмотреть лишь один тестовый сигнал на этапе идентификации, например, ступенчатый, как наиболееширокополосный и вынуждающий систему проявить все динамические особенности.Таким образом, ПМ подстраивается к реальной системе, и в дальнейшем происходит настройка подстраиваемой модели, а реальная система отключается от процесса настройки [8].
После этапа идентификации тестовый сигнал подается на вход подстраиваемой модели и эталонной модели. ЭМ задает множество желаемых переходных процессов, удовлетворяющих требованиям к качеству регулирования. Ошибка рассогласования поступает в блок настройки, в котором минимизируется выражение:
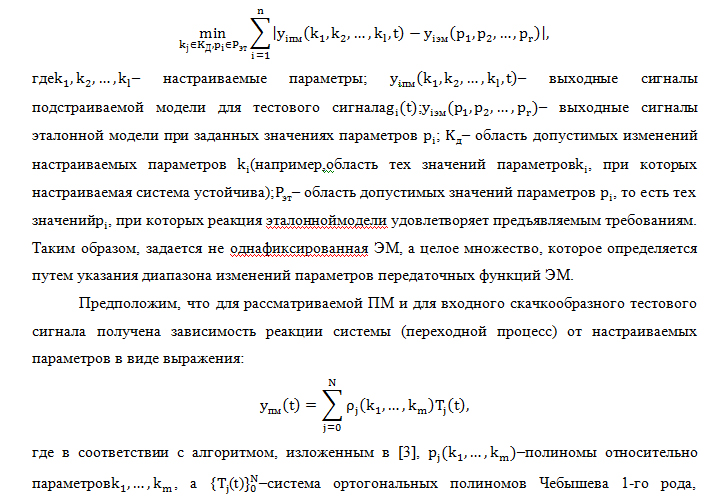
Предположим далее,
что при полученных значениях настраиваемых параметров (k1,...,kn) (обозначим значения настраиваемых параметров в виде вектора![]() ), не удовлетворяются первичные показатели качества, то есть
перерегулирование Ϭ>Ϭд, Т>Тппд. Следовательно,необходимо найти такой вектор К, при котором
требования,предъявляемые к первичным показателям качества удовлетворяются.
), не удовлетворяются первичные показатели качества, то есть
перерегулирование Ϭ>Ϭд, Т>Тппд. Следовательно,необходимо найти такой вектор К, при котором
требования,предъявляемые к первичным показателям качества удовлетворяются.
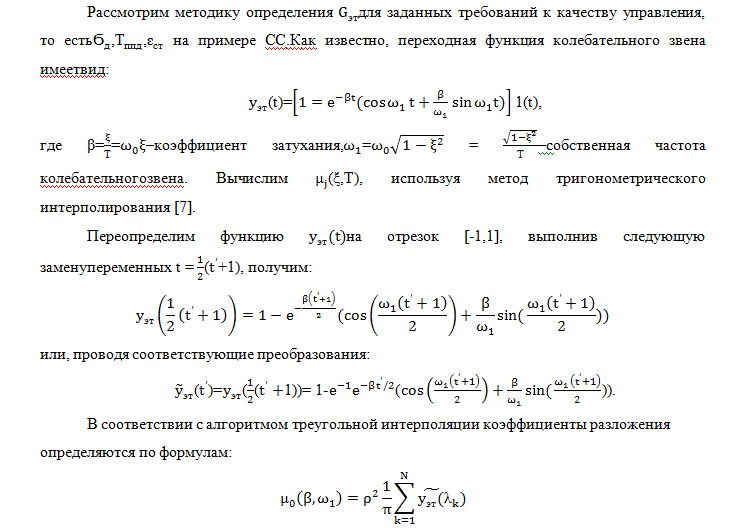
2. Пример реализации алгоритма настройки
Построение алгоритма
настройки рассмотрим на примере следящей системы (СС) с учетомследующих показателей
качества:перерегулирование Ϭ, время переходного
процесса ![]() и статическая точность
и статическая точность ![]() .В качестве передаточной функции ЭМ рассмотрим колебательное
звено, которое,как известно,хорошо аппроксимируетреакциюСС на единичное
ступенчатое воздействие 1(t).
.В качестве передаточной функции ЭМ рассмотрим колебательное
звено, которое,как известно,хорошо аппроксимируетреакциюСС на единичное
ступенчатое воздействие 1(t).
Пусть постоянная
времени Т и коэффициент демпфирования ξ передаточной функции ЭМ такие, что ![]() (t) удовлетворяет предъявленным требованиям к качеству
регулирования.Далее представим
(t) удовлетворяет предъявленным требованиям к качеству
регулирования.Далее представим ![]() (t) в видеразложения в ряд по полиномам Чебышева:
(t) в видеразложения в ряд по полиномам Чебышева:
![]()
Тогда
![]()
а решение системы нелинейных алгебраических уравнений вида:
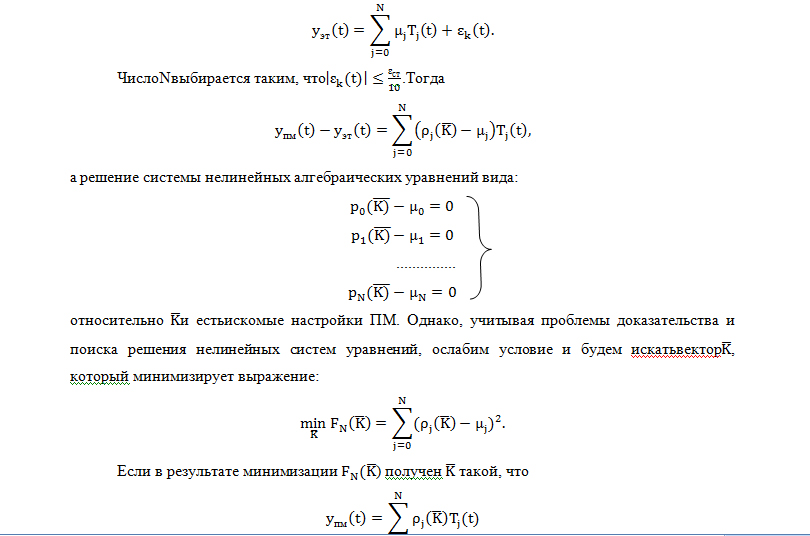
удовлетворяет предъявляемым требованиям, то задача считается решенной.
Следует отметить, что
успех решения задачи в значительной степени зависит от удачного выбора кривой![]() (t), то есть параметров эталонного колебательного звена. Поэтому
имеет смысл,исходя из заданных требований к качеству регулирования, определить область
(t), то есть параметров эталонного колебательного звена. Поэтому
имеет смысл,исходя из заданных требований к качеству регулирования, определить область
![]() , такую, что переходная функция колебательного звена со
значениями ξ и Т из этой области, удовлетворяет
требуемому качеству. Пусть имеется разложение переходной функции колебательного
звена в виде явной зависимости коэффициентов разложения от ξ и T, то есть
, такую, что переходная функция колебательного звена со
значениями ξ и Т из этой области, удовлетворяет
требуемому качеству. Пусть имеется разложение переходной функции колебательного
звена в виде явной зависимости коэффициентов разложения от ξ и T, то есть
![]()
Тогда получим функцию![]() ) в виде
) в виде ![]() и будем ееминимизировать по переменным
и будем ееминимизировать по переменным ![]() ,ξ,Т:
,ξ,Т:
![]()
Таким образом, из всего множества допустимых реакций выбирается та, которая наиболее адекватна динамике рассматриваемой системы.Для решения задачи необходимо выбрать N и определить области допустимых значений для заданных требований к качеству управления.
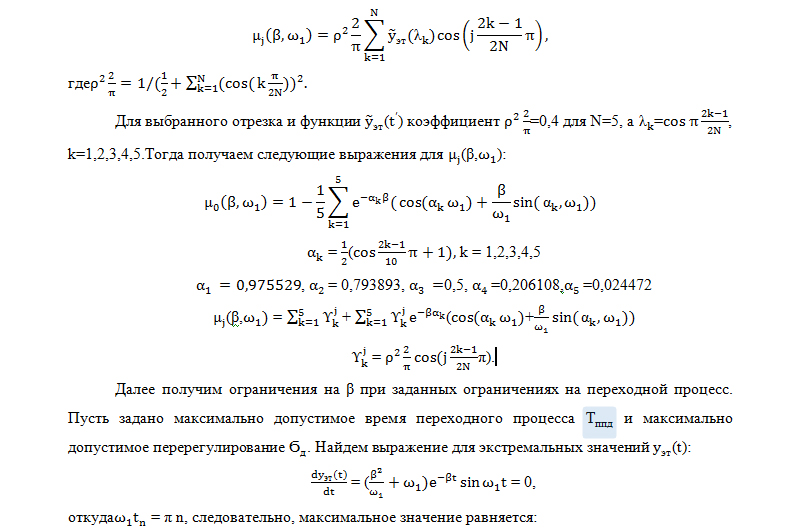

В результате получены
ограничения на β и ![]() , при которых переходный процесс
, при которых переходный процесс ![]() (t) удовлетворяет предъявляемым требованиям к качеству
управления с точки зрения заданных показателей качества,значит для
рассматриваемого примера определена
(t) удовлетворяет предъявляемым требованиям к качеству
управления с точки зрения заданных показателей качества,значит для
рассматриваемого примера определена ![]()
Выводы
Разработанный алгоритм адаптации САУ обеспечивает накопление информации о динамике управляемого объекта и построение многовариантного прогноза состояния системы в пространстве настраиваемых параметров. Таким образом, в контур САУ фактически вводится акцептор действия, прогнозирующий в реальном масштабе времени наилучший вариант настройки САУ в рамках заданных критериев качества.
Рецензенты:Пролетарский А.В., д.т.н., профессор, декан факультета «Информатика и системы управления», зав. кафедрой «Компьютерные системы и сети», МГТУ им. Н.Э.Баумана, г. Москва;
Неусыпин К.А., д.т.н., профессор, профессор кафедры «Системы автоматического управления», МГТУ им. Н.Э.Баумана», г. Москва.
Библиографическая ссылка
Задорожная Н.М. АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ДВУМЯ ЭТАЛОННЫМИ МОДЕЛЯМИ // Современные проблемы науки и образования. 2015. № 1-2. ;URL: https://science-education.ru/en/article/view?id=20134 (дата обращения: 02.08.2026).