


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
THE ANALYSIS OF POSTCRITICAL BENDING DEFORMATIONS OF VARIABLE CROSS-SECTION BEAM UNDER DIFFERENT LOADING CONDITIONS

Постановка задачи
Цель данной работы заключалась в проведении анализа посткритического поведения сильно деформированного стержня [5]. Рассмотрен стержень трубчатого поперечного сечения, имеющий переменный осевой момент инерции:
 , (1)
, (1)
где ![]() ,
, ![]() — внешний переменный диаметр по длине стержня,
— внешний переменный диаметр по длине стержня, ![]() — внутренний диаметр поперечного сечения. Единственное ограничение, накладываемое на функцию
— внутренний диаметр поперечного сечения. Единственное ограничение, накладываемое на функцию ![]() , следует из физического смысла задачи:
, следует из физического смысла задачи:
![]()
![]() (2)
(2)
Далее выбираем функцию ![]() в следующем виде:
в следующем виде:
![]() , (3)
, (3)
где с — некоторые константы.
Задание функции в виде (3) обеспечивает довольно гладкую симметричную зависимость момента инерции от осевой координаты. Например, если ![]() , то толщина стержня стремится к нулю по ее концам. Внешний диаметр посередине стержня превышает на 10% внутренний диаметр, который постоянен по его длине.
, то толщина стержня стремится к нулю по ее концам. Внешний диаметр посередине стержня превышает на 10% внутренний диаметр, который постоянен по его длине.
Положение равновесия стержня определяется углом ![]() , определяемым между горизонталью и касательной к изогнутой оси стержня (см. рис. 1 для случая сжатия осевой силой), выбранном в виде неизвестной функции. Данный угол является функцией материальной координаты
, определяемым между горизонталью и касательной к изогнутой оси стержня (см. рис. 1 для случая сжатия осевой силой), выбранном в виде неизвестной функции. Данный угол является функцией материальной координаты ![]() .
.
Рис. 1. Сильно изогнутый стержень под действием сжимающей силы
Для того чтобы получить уравнения, определяющие статическое равновесие стержня, подвергнем минимизации следующий функционал потенциальной энергии [2]:
 (4)
(4)
Условие стационарности данного функционала определяет устойчивое положение равновесия стержня. Первое слагаемое в квадратных скобках представляет вклад линейной компоненты в потенциальную энергию, второе относится к нелинейной компоненте. Постановка задачи (4) учитывает нагружение и сжимающей силой, и изгибающими моментами. Данное выражение записано в безразмерной (разделено на множитель ![]() ). В (4):
). В (4): ![]() — безразмерная осевая координата,
— безразмерная осевая координата, ![]() — значение безразмерной статической осевой сжимающей силы,
— значение безразмерной статической осевой сжимающей силы, ![]() — отношение внутреннего диаметра к длине стержня,
— отношение внутреннего диаметра к длине стержня, ![]() — символ Кронекера и
— символ Кронекера и ![]() — изгибающий момент в точке
— изгибающий момент в точке ![]() .
.
Вариация функционала энергии (4) относительно неизвестной функции ![]() приводит к следующему дифференциальному уравнению:
приводит к следующему дифференциальному уравнению:
![]() (5)
(5)
Рассмотрим шарнирно-опертый стержень, при этом данное дифференциальное уравнение следует решать с кинематическим условием:
 , (6)
, (6)
которое означает, что боковое перемещение стержня ![]() равно нулю на правом конце.
равно нулю на правом конце.
Решение для симметричной конфигурации стержня
Аналитического решения данной задачи для произвольной функции ![]() не существует, так что необходимо применить какой-то численный алгоритм. Используется алгоритм метода локальных вариаций [1], который ограничивается симметричной конфигурацией трубки, так что распределение изгибающих моментов должно быть симметрично при
не существует, так что необходимо применить какой-то численный алгоритм. Используется алгоритм метода локальных вариаций [1], который ограничивается симметричной конфигурацией трубки, так что распределение изгибающих моментов должно быть симметрично при ![]() .
.
При ![]() задача имеет хорошо известное аналитическое решение для случая нагружения осевой сжимающей силой. Элементарный линейный анализ устойчивости дает величину статической силы потери устойчивости
задача имеет хорошо известное аналитическое решение для случая нагружения осевой сжимающей силой. Элементарный линейный анализ устойчивости дает величину статической силы потери устойчивости ![]() , а нелинейный анализ закритического поведения для
, а нелинейный анализ закритического поведения для ![]() >
>![]() определяет положение трубки в виде эластики Эйлера [3]. Данный случай служит обычной задачей для проверки численного алгоритма.
определяет положение трубки в виде эластики Эйлера [3]. Данный случай служит обычной задачей для проверки численного алгоритма.
В случае задания распределенных моментов вводим их осевыми деформациями ![]() , заданными на верхнем фибре трубки (т.е. на расстоянии
, заданными на верхнем фибре трубки (т.е. на расстоянии ![]() от нейтральной оси) при заданном поперечном сечении [4]. Деформации на расстоянии
от нейтральной оси) при заданном поперечном сечении [4]. Деформации на расстоянии ![]() от нейтральной оси должны быть такими же по величине и иметь противоположный знак. Изгибающий момент, действующий в данном поперечном сечении, определяется формулой
от нейтральной оси должны быть такими же по величине и иметь противоположный знак. Изгибающий момент, действующий в данном поперечном сечении, определяется формулой ![]() (в размерном виде).
(в размерном виде).
Метод локальных вариаций позволяет определить изгибающие моменты ![]() , действующие в данном поперечном сечении стержня, в виде:
, действующие в данном поперечном сечении стержня, в виде:
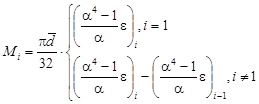 (7)
(7)
где ![]() .
.
Если деформация задана только в точке ![]() , то сосредоточенный изгибающий момент вычисляется только в точке
, то сосредоточенный изгибающий момент вычисляется только в точке ![]() .
.
Для проверки численной процедуры произведено сравнение найденной формы стержня с имеющимися аналитическими результатами. Данный тест относится к равномерному распределению функции ![]() вдоль оси стержня. Параметры численной процедуры выбраны следующими: N=16..1024 — число интервалов по оси стержня, h =
вдоль оси стержня. Параметры численной процедуры выбраны следующими: N=16..1024 — число интервалов по оси стержня, h =![]() — шаг варьирования. Величина статической осевой силы
— шаг варьирования. Величина статической осевой силы ![]() . Если функция
. Если функция ![]() определяется по алгоритму метода локальных вариаций [1], то боковое перемещение
определяется по алгоритму метода локальных вариаций [1], то боковое перемещение ![]() и соответствующее горизонтальное перемещение
и соответствующее горизонтальное перемещение ![]() находятся в виде:
находятся в виде:
 (8)
(8)
На рисунке 2 представлены две формы равновесного положения стержня (точное решение и решение, полученное по методу локальных вариаций). Хорошее соответствие между двумя кривыми на рисунке 2 доказывает, что принятая численная процедура может быть использована для определения закритического статического положения стержня после потери устойчивости.
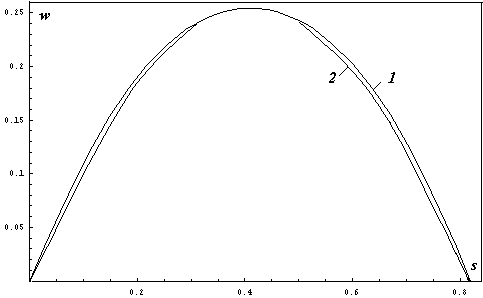
Рис. 2. (при ![]() ,
, ![]() ) кривая 1 представляет закритическое положение стержня, соответствующее эластики Эйлера, найденной в форме эллиптических интегралов (точное решение), а кривая 2 определяет форму равновесия, полученную с помощью алгоритма метода локальных вариаций
) кривая 1 представляет закритическое положение стержня, соответствующее эластики Эйлера, найденной в форме эллиптических интегралов (точное решение), а кривая 2 определяет форму равновесия, полученную с помощью алгоритма метода локальных вариаций
На рисунке 3 показано положение равновесия, которое определяется двумя симметрично расположенными (![]() ,
,![]() ) сосредоточенными моментами (
) сосредоточенными моментами (![]() ). Изгиб существует только между точками, где приложены моменты, внешние части стержня остаются прямыми.
). Изгиб существует только между точками, где приложены моменты, внешние части стержня остаются прямыми.
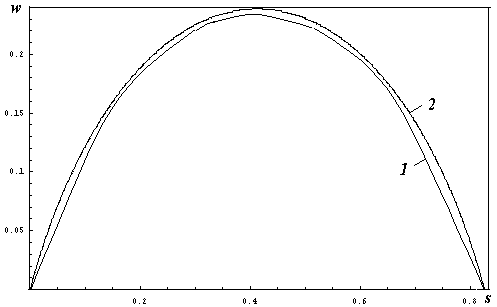
Рис. 3. (при ![]() ,
, ![]() ) кривая 1 представляет точное решение, а кривая 2 определяет численное решение
) кривая 1 представляет точное решение, а кривая 2 определяет численное решение
Алгоритм решения нелинейной задачи статического изгиба определяет то, что положение равновесия должно быть симметричным.
Выводы
Произведен статический анализ шарнирно-опертого стержня. Для того чтобы получить решение, определяющее статическое положение стержня, был использован метод локальных вариаций. Сопоставление численного и аналитического решений позволило подтвердить правильность используемого алгоритма.
Рассмотренная система представляет некоторые особенности механических систем, используемых в практических приложениях, а именно в химической и нефтегазовой промышленности.
Рецензенты:
Картузов Е.И., д.т.н., профессор кафедры теоретической механики Санкт-Петербургского Государственного морского технического университета, г. Санкт-Петербург;
Сорокин С.В., д.т.н., профессор кафедры сопротивления материалов Санкт-Петербургского Государственного морского технического университета, г. Санкт-Петербург.
Библиографическая ссылка
Терентьев А.В. АНАЛИЗ ПОСТКРИТИЧЕСКИХ ИЗГИБНЫХ ДЕФОРМАЦИЙ СТЕРЖНЯ ПЕРЕМЕННОГО СЕЧЕНИЯ ПРИ РАЗЛИЧНЫХ УСЛОВИЯХ НАГРУЖЕНИЯ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=17808 (дата обращения: 17.07.2026).