


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
HUMAN-MACHINE SYSTEM: CLASSIFICATION OF OBJECTS BY THEIR DYNAMIC CHARACTERISTICS

Известно, стиль управления оператора эргатической системы, описываемой уравнением движения
![]()
(![]() ,
, ![]() - вектор управления,
- вектор управления, ![]() - возмущающие воздействия), определяется собственными частотами колебаний и коэффициентами демпфирования объекта [10…15]. Поэтому актуальна объективизация оценки оператором управляемости объекта в процессе нормального функционирования целостной человеко-машинной системы [1…9]. Для классификации объектов воспользуемся функционалом
- возмущающие воздействия), определяется собственными частотами колебаний и коэффициентами демпфирования объекта [10…15]. Поэтому актуальна объективизация оценки оператором управляемости объекта в процессе нормального функционирования целостной человеко-машинной системы [1…9]. Для классификации объектов воспользуемся функционалом
|
|
(1) |
 ,
,
![]() - корни характеристического полинома;
- корни характеристического полинома; ![]() - положительные весовые константы,
- положительные весовые константы, ![]() - класс объекта в заданной N-балльной шкале.
- класс объекта в заданной N-балльной шкале.
В частности, для систем второго порядка области равных оценок на плоскости ![]() определятся в виде:
определятся в виде:
![]()
для колебательных систем относительно инвариантов
![]()
(![]() - след матрицы
- след матрицы ![]() ,
, ![]() =
=![]() ;
; ![]() ,
, ![]() (устойчивость),
(устойчивость), ![]() (колебательность), для рассматриваемых систем
(колебательность), для рассматриваемых систем ![]() ).
).
Из ![]() следует:
следует:
![]()
или
![]() .
.
При фиксированном ![]() справедливо:
справедливо:
![]() ,
,
![]() ),
),
![]()
Так как ![]() и
и ![]() , то из выражений для
, то из выражений для ![]() и двойного неравенства
и двойного неравенства ![]() получим:
получим:
![]() .
.
Таким образом, области ![]() на плоскости
на плоскости ![]() определятся системой неравенств:
определятся системой неравенств:
а области ![]() соотношениями
соотношениями
![]() .
.
Здесь ![]() -множество на плоскости
-множество на плоскости ![]() определяемое системой неравенств
определяемое системой неравенств
Для описания множеств ![]() и областей
и областей ![]() изучим поведение
изучим поведение ![]() и
и ![]() как функций двух переменных k и
как функций двух переменных k и ![]() .
.
Меньший корень ![]() уравнения
уравнения
![]()
соответствует большему корню ![]() и возрастает с возрастанием k (непосредственно следует из уравнения и соотношения
и возрастает с возрастанием k (непосредственно следует из уравнения и соотношения  .
.
Справедливо
 ;
;
 .
.
Откуда следует ![]() .
.
Из выражений для ![]() и установленного выше неравенства
и установленного выше неравенства ![]() следует
следует
![]() при
при ![]() .
.
При ![]() =0 (
=0 (![]() имеем:
имеем:
![]()
Нижняя граница области ![]() возрастает с возрастанием
возрастает с возрастанием ![]() (убывает с возрастанием
(убывает с возрастанием ![]() ):
):
 .
.
 .
.
Если для функционала ![]() , то при малых
, то при малых ![]() и при
и при ![]() таких, что
таких, что ![]() (то есть при
(то есть при ![]() , близких к 1) справедливо
, близких к 1) справедливо ![]() , и верхняя граница
, и верхняя граница ![]() возрастает по
возрастает по ![]() (убывает по
(убывает по ![]() ) при
) при ![]() , близких к нулю (при
, близких к нулю (при ![]() , близких к 1); при
, близких к 1); при ![]() , близких к корню
, близких к корню ![]() (при
(при ![]() , близких к корню
, близких к корню ![]() ) имеет место
) имеет место ![]() .
.
Области ![]() (соответственно
(соответственно ![]() ) представлены на рис.1.
) представлены на рис.1.
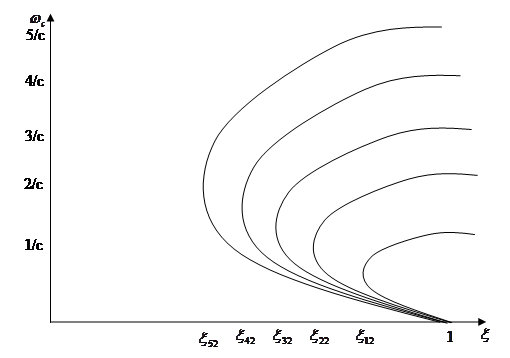
Рис.1. Области ![]()
Рассмотрим далее неколебательные системы (![]() ).
).
Прежде всего отметим, для каждой из компонент ![]() справедливо
справедливо
![]() ,
,
![]() ,
,
![]() ,
,
так что
![]() ,
,![]() ,
, ![]() ,
, ![]() .
.
Определим области равных оценок относительно инвариантов ![]() и
и ![]() .
.
Подставляя в ![]() и
и ![]() значения
значения ![]() и
и ![]() через
через ![]() и
и ![]() , получим
, получим
![]() ;
; ![]() .
.
Откуда
|
|
(2)
|
|
|
(3) |
Для неравенства (3) в силу ![]() дискриминант
дискриминант
![]() .
.
Поэтому (3) выполняется при
|
|
(4)
|
|
|
(5) |
то есть вне отрезка ![]() , где
, где ![]() - корни трехчлена
- корни трехчлена
![]() ,
,
![]() ,
, ![]() .
.
Отметим
![]()
для всех ![]() .
.
Действительно, если бы было
![]() ,
,
то из этого следовало бы
![]() .
.
Так как ![]() , то
, то
![]() ,
, ![]() ,
, ![]() .
.
Полученное противоречие свидетельствует о справедливости (5) для всех ![]() .
.
Поэтому неравенства (2) и (4) несовместимы.
С другой стороны при всех ![]()
![]() ,
,
так как
![]()
при всех ![]() в силу
в силу
![]() .
.
Таким образом, область решения системы неравенств (2) и (4) совпадает с областью решения неравенства (4). Поэтому для построения областей равных оценок достаточно построить лишь кривые
![]() ;
;
![]() при
при ![]() (области равных оценок приводятся на рис.2).
(области равных оценок приводятся на рис.2).
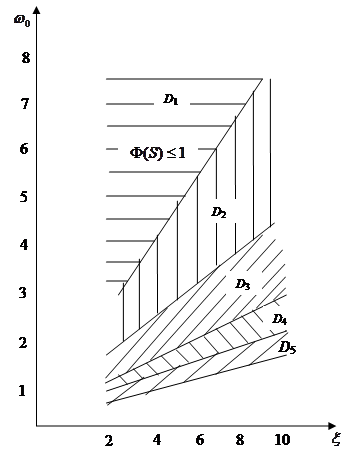
Рис.2. Аппроксимация областей равных оценок
Полученная методика многократно использовалась для оценки психофизиологической напряженности человека-оператора при управлении объектом, а также для оценки имитационных характеристик тренажных и обучающих комплексов, используемых для подготовки операторов транспортных систем [1…3,14].
Рецензенты:
Родионов Ю.В., д.т.н., профессор, директор автомобильно-дорожного института ПГУАС, профессор кафедры «Эксплуатация автомобильного транспорта», г. Пенза;
Кошев А.Н., д.х.н., профессор, профессор кафедры информационно-вычислительных систем Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Гарькина И.А., Данилов А.М., Сорокин Д.С. КЛАССИФИКАЦИЯ ОБЪЕКТОВ ЭРГАТИЧЕСКИХ СИСТЕМ ПО ИХ ДИНАМИЧЕСКИМ ХАРАКТЕРИСТИКАМ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/en/article/view?id=16136 (дата обращения: 03.07.2026).