



Введение
Существует ряд прикладных задач, где требуется управлять объектом в положении неустойчивого равновесия [1]. Оценку эффективности предлагаемых решений часто проводят по результатам решения классической задачи механики и теории управления, заключающейся в приведении двухзвенного маятника из произвольного начального положения в произвольное неуравновешенное состояние и удержания ее там. Это связано с тем, что уравнение состояния такой динамической системы представляет собой упрощенную модель механического двухзвенного манипулятора робота с безредукторными приводами и абсолютно жесткими элементами конструкции. Управление таким объектом осуществляется за счет изменения вращающих моментов в шарнирах устройства.
Их решение достигается как классическими методами, базирующимися на принципе максимума Л. С. Понтрягина [9] или методе динамического программирования Р. Беллмана [4], так и основанными, к примеру, на концепции обратных задач динамики, функциях Ляпунова, идее декомпозиции [1, 7]. Однако недостатком первых является то, что решение задачи синтеза для нелинейных систем получено только для частных случаев. Для второй группы методов, как правило, характерно введение различного рода упрощений и ограничений [1, 7].
Работы [2, 3, 5, 6] показывают, что использование механико-математического приема, названного объединенный принцип максимума, позволяет получить оптимальные, конструктивные, достаточно просто реализуемые на практике решения. Полученные в работе управления определены с точностью до синтезирующей функции. Для ее построения в статье предлагается использовать метод анализа поверхности переключения в фазовом пространстве переменных Лагранжа, где обобщенная сила меняет знак и выполняется условие постоянства обобщенного кинетического потенциала.
Проведенное математическое моделирование показало высокую эффективность использования объединенного принципа максимума, заключающуюся в повышении точности расчетов, уменьшении сложности процедуры синтеза и вычислительных затрат в сравнении с классическими [5, 7, 9].
Постановка задачи. Движение управляемой системы подчиняется принципу Гамильтона – Остроградского, согласно которому обращается в нуль величина [8]:
 ,
, ![]() . (1)
. (1)
Целевой функционал представлен следующим выражением:

![]() (2)
(2)
где ![]() – обобщенные координаты и скорости,
– обобщенные координаты и скорости, ![]() – определенно-положительная функция,
– определенно-положительная функция, ![]() – кинетическая энергия,
– кинетическая энергия, ![]() – элементарная работа обобщенных сил, зависящих от управлений,
– элементарная работа обобщенных сил, зависящих от управлений, ![]() .
.
Из принципа (1) следуют уравнения Лагранжа второго рода:
![]() . (3)
. (3)
Требуется определить такие управления ![]() или
или ![]() , которые переводят систему (3) из начального состояния
, которые переводят систему (3) из начального состояния ![]() в конечное
в конечное ![]() , при условии минимума целевого функционала (2).
, при условии минимума целевого функционала (2).
Объединенный принцип максимума. Теорема [5, 6]. Условие экстремума (2) определяет максимум функции обобщенной мощности:
![]() . (4)
. (4)
где ![]() – фиктивная сила, зависящая от формы целевого функционала, при этом
– фиктивная сила, зависящая от формы целевого функционала, при этом ![]() , а на концах траектории
, а на концах траектории ![]() выполняются условия трансверсальности для функции Гамильтона – Остроградского и обобщенного кинетического потенциала:
выполняются условия трансверсальности для функции Гамильтона – Остроградского и обобщенного кинетического потенциала:
![]() , (5)
, (5)
![]() . (6)
. (6)
Основные элементы доказательства. Использование техники асинхронного и игольчатого варьирования к расширенному функционалу (2) приводится к условиям трансверсальности (5), (6) и асинхронной вариации функционала для произвольной обобщенной силы ![]() :
:
 . (7)
. (7)
Из сравнения (7) и асинхронной вариации ![]() , полученной для
, полученной для ![]() , при
, при ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , следует выражение второй вариации функционала:
, следует выражение второй вариации функционала:
 . (8)
. (8)
При предельном переходе: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() получаем:
получаем:
![]() . (9)
. (9)
Если обобщенная сила ![]() выбрана так, что неравенство выполняется для любых
выбрана так, что неравенство выполняется для любых ![]() , то из (9) вытекает теорема объединенного принципа максимума (4). Из (4) следует, что обобщенные силы с точностью до синтезирующей функции
, то из (9) вытекает теорема объединенного принципа максимума (4). Из (4) следует, что обобщенные силы с точностью до синтезирующей функции ![]() находятся из выражения:
находятся из выражения:
![]() , (10)
, (10)
которое определяет в фазовом пространстве гиперповерхности переключения управления.
Построение синтезирующей функции на основе метода представления траектории в фазовом пространстве. Так как гиперповерхности переключения обобщенная сила равна нулю, условия трансверсальности (6) преобразуются в условие постоянства обобщенного кинетического потенциала в данный момент времени:
![]() . (11)
. (11)
Это уравнение представляет собой поверхность гиперболического параболоида в фазовом пространстве переменных Лагранжа ![]() .
.
Преобразование Лежандра функции ![]() по переменным
по переменным ![]() есть функция Гамильтона (5), представляющая поверхность эллипсоида в переменных Гамильтона
есть функция Гамильтона (5), представляющая поверхность эллипсоида в переменных Гамильтона ![]() :
:
![]() , (12)
, (12)
в которой величины ![]() выражены через
выражены через ![]() , при помощи уравнений:
, при помощи уравнений:
![]() (13)
(13)
для обобщенных импульсов, при этом преобразовании величины ![]() играют роль параметров.
играют роль параметров. ![]() – алгебраическое дополнение элемента
– алгебраическое дополнение элемента ![]() гессиана кинетического потенциала:
гессиана кинетического потенциала:
 . (14)
. (14)
На поверхности эллипсоида переключения управления канонические уравнения Гамильтона имеют вид:
![]() , (15)
, (15)
так как кинетический потенциал системы на поверхности:
![]() . (16)
. (16)
Синтезирующая функция записывается в следующем виде [6]:
![]() , (17)
, (17)
имеющая смысл углового коэффициента касательной к траектории на поверхности переключения.
Пример. Рассмотрим двойной механический маятник [2, 3] (рисунок 1).
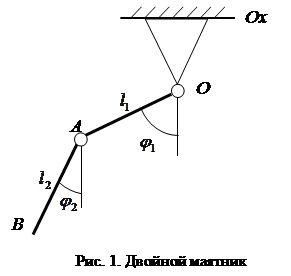
Выбор в качестве обобщенных координат углов ![]() и
и ![]() позволяет записать кинетическую и потенциальную энергию такой системы в следующей форме:
позволяет записать кинетическую и потенциальную энергию такой системы в следующей форме:
![]() , (18)
, (18)
![]() , (19)
, (19)
тогда уравнения Лагранжа второго рода (3) принимают вид:
 (20)
(20)
где ![]() – ускорение свободного падения;
– ускорение свободного падения; ![]() ,
, ![]() – массы стержней;
– массы стержней; ![]() ,
, ![]() – длины стержней.
– длины стержней.
Требуется синтезировать законы ограниченных управлений ![]() таких, что двойной маятник можно перевести из произвольного начального положения:
таких, что двойной маятник можно перевести из произвольного начального положения: ![]() в произвольное неуравновешенное состояние
в произвольное неуравновешенное состояние ![]() ,
, ![]() и управлять заданным движением
и управлять заданным движением ![]() относительно этого нового положения уравновешенности [8].
относительно этого нового положения уравновешенности [8].
Функционал качества управления имеет вид:
![]() . (21)
. (21)
Оптимальные решения для кусочно-постоянных управлений полученные методом объединенного принципа максимума имеют вид [5, 6]:
 , (22)
, (22)
 , (23)
, (23)
где ![]() . Достигнутые значения целевого функционала составили
. Достигнутые значения целевого функционала составили ![]() и
и ![]() соответственно.
соответственно.
Оптимальное решение в классе кусочно-непрерывных управлений, полученное методом объединенного принципа максимума, записывается в следующей форме:
 . (24)
. (24)
Здесь ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()
![]() Достигнутое значение целевого функционала
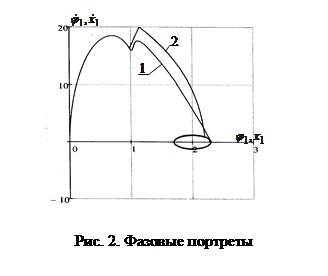
Достигнутое значение целевого функционала ![]() . Результаты математического моделирования приведены на рисунках 2–3.
. Результаты математического моделирования приведены на рисунках 2–3.
На рис. 2 показаны фазовые портреты: линия 1 – решение в классе кусочно-непрерывных управлений; линия 2 – решение в классе кусочно-постоянных управлений.
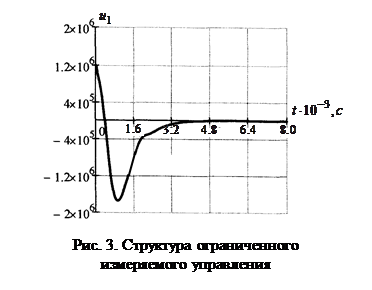
На рис. 3 показана структура ограниченного измеряемого управления. Достигнутое значение целевого функционала ![]() . При неограниченном росте параметра ограничения значение целевого функционала сколь угодно мало
. При неограниченном росте параметра ограничения значение целевого функционала сколь угодно мало ![]() .
.
Выводы
Новый метод синтеза оптимального управления двойным маятником в неуравновешенном конечном состоянии с использованием синтезирующей функции по предлагаемому методу обладает универсальностью и простотой. Его применение для класса кусочно-непрерывных и кусочно-постоянных управлений и обеспечивает высокую точность расчетов, требует меньших вычислительных затрат в сравнении с известными решениями.
Исследование проведено при поддержке Министерства образования и науки Российской Федерации, соглашение 14В37.21.2067
Рецензенты:
Звездина Марина Юрьевна, доктор физико-математических наук, доцент, заведующая кафедрой «Радиоэлектроника», Минобрнауки России, Ростовский технологический институт сервиса и туризма (филиал) Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Южно-Российский государственный университет экономики и сервиса», г. Ростов-на-Дону.
Риполь-Сарагосси Татьяна Леонидовна, доктор технических наук, профессор, заместитель директора по дополнительному образованию, Минобрнауки России, Филиал государственного образовательного учреждения высшего профессионального образования «Московский государственный университет технологий и управления» в г. Ростове-на-Дону, г. Ростов-на-Дону.
Библиографическая ссылка
Лазаренко С.В., Костоглотов А.А., Костоглотов А.И., Чеботарев А.В. МЕТОД МЕХАНИКО – МАТЕМАТИЧЕСКОГО СИНТЕЗА ПРИ ПОСТРОЕНИИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ МЕХАНИЧЕСКИМИ СИСТЕМАМИ // Современные проблемы науки и образования. 2012. № 6. ;URL: https://science-education.ru/ru/article/view?id=7733 (дата обращения: 23.07.2026).