



Введение
Актуальность данной статьи обусловлена тем, что современные информационные технологии трехмерного моделирования, виртуальной и дополненной реальности активно применяются в образовательной сфере при создании тренажеров, виртуальных экскурсий, обучающих компьютерных игр и программ [1-3]. Кроме того, практическое обучение сварке в реальных условиях сопровождается рядом объективных проблем: высокой опасностью, значительными затратами на расходные материалы, ограниченными возможностями моделирования опасных ситуаций. Использование цифровых тренажёров позволяет существенно снизить эти риски и обеспечить безопасное, доступное и, что самое главное, повторяемое обучение [4-6].
Одновременно с этим в России активно развивается интеграция среднего профессионального образования (СПО) и высшего образования (ВО). Необходимо выстраивать непрерывные образовательные траектории, согласовывать практические компетенции и обеспечивать плавный переход выпускников СПО в вузы [7-9]. Именно цифровые технологии могут помочь обеспечить данную интеграцию [10-12].
Цель исследования
Обоснование необходимости создания и разработка 3D-тренажера сварщика как инструмента реализации образовательных программ, обеспечивающих подготовку специалистов сварочного производства в системе среднего профессионального и высшего образования.
Материал и метод исследования
Материалами исследования являются нормативно-справочные документы и действующие образовательные программы, регламентирующие подготовку кадров по сварочным технологиям и определяющие содержание, объем, порядок изучения учебных предметов в учреждениях СПО и ВО.
Методами исследования являются теоретические методы, связанные с анализом и синтезом технической, научно-методической и нормативной литературы, а также эмпирические методы, основанные на педагогическом эксперименте, наблюдении, тестировании, анализе продуктов учебной деятельности.
Результаты исследования и их обсуждение
Сформируем конкретный список проблем, с которыми сталкивается реальное обучение сварке:
– опасность получения травм обучающимися;
– высокая стоимость расходных материалов (электроды, газ, проволока, металлы);
– износ оборудования и необходимость его постоянного обслуживания;
– невозможность моделирования аварийных ситуаций;
– ограниченность учебных мест в мастерских.
Тем самым использование 3D-тренажёра позволяет решить целый ряд проблем: полностью исключить риски травм, сделать подготовку экономичной, повторять операции неограниченное число раз, создавать сложные производственные сценарии, включая аварийные, обеспечивать обучение в любое время и на любом компьютере.
Интеграция среднего профессионального и высшего образования предоставляет возможность выстроить непрерывный маршрут обучения от колледжа к университету, согласовать компетенции рабочих и инженерных специальностей, избежать дублирования дисциплин, а переход студентов СПО к обучению в вузах становится более организованным.
Разработанный 3D-тренажёр служит единым инструментом для двух уровней образования. В системе СПО он подходит для освоения базовых практических навыков сварки. В высшем образовании – для использования в анализе, проектировании, оценке технологических процессов сварки.
Следовательно, тренажёр является связующим звеном между уровнями подготовки.
При разработке проекта были изучены аналоги, которые рассмотрим ниже.
1. Dig in Vision – VR-тренажёр сварки, предназначенный как для новичков, так и для опытных сварщиков, который предусматривает контроль параметров выполнения операций.
2. Weldingsimulator.net – VR/3D-платформа для колледжей с возможностью отслеживания прогресса и интеграции в учебный процесс.
3. Fronius Welducation Simulator – AR/VR-решение, ориентированное на безопасное обучение и снижение расходов.
Но эти решения имеют свои проблемы:
– высокая стоимость оборудования;
– невозможность адаптации под российские ФГОС;
– необходимость специализированной VR-инфраструктуры;
– отсутствие русской локализации.
Отечественные разработки обладают высокой стоимостью. Это подтверждает необходимость создания доступного 3D-тренажёра, интегрируемого в региональные программы СПО и ВО.
Разработка проекта осуществлялась с использованием следующих инструментов:
- Unity 3D – построение сцены, физики, интерфейса;
- C# – язык программирования для реализации игровой логики: управление от первого лица, проверка условий, активация сварки, обработка ошибок;
- Blender – платформа для моделирования аппарата, баллона, кабелей, заземления, маски и деталей и другого;
- Unity Physics – обеспечение физически корректного поведения объектов;
- Particle System – визуализация искр и световых эффектов сварки.
Сформируем основные требования, заложенные при проектировании.
1. Безопасность и реалистичность процесса.
2. Интерактивность – выполнение операций в правильной последовательности.
3. Физическая достоверность поведения объектов.
4. Доступность – работа на обычных ПК без VR-оборудования.
5. Масштабируемость – возможность перехода в VR без изменения архитектуры.
Опишем работу проекта.
Пользователь попадает в виртуальную сварочную мастерскую, где он может:
- поднять и подключить массу (заземление);
- надеть защитную маску;
- перемещать детали;
- подключить сварочный аппарат и газовый баллон;
- выполнить сварку с визуальными эффектами искр и изменения поверхности;
- получить предупреждения при нарушении техники безопасности.
Все действия реализованы в виде последовательного технологического процесса.
Реализованный тип сварки MIG/MAG – наиболее распространённый метод сварки в промышленности, СПО и ВО.
На данный момент выполнено: интерактивная мастерская; управление от первого лица; физическая модель объектов; визуальная имитация процесса сварки; система уведомлений и ошибок; логика включения сварочного режима только при соблюдении всех условий.
На рисунке 1 показана функция перемещения детали.
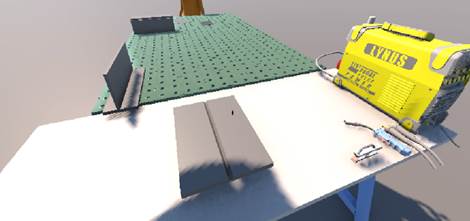
Рис. 1. Перемещение детали. Примечание: составлено авторами на основе полученных данных в ходе исследования
В листинге 1 представлен участок кода на языке программирования C#, отвечающий за возможность взять объект (как будто игрок держит в руке), удерживать его перед собой и затем отпустить.
Листинг 1. Фрагмент скрипта PickupObject
void Up (){
if (isHeld && Point != null)
{
transform.pos = Point.position + Point.TransformDirection(localOffset);
if (customRotation.HasValue){
transform.rotation = Point.rotation * customRotation.Value;
}}}
Если объект удерживается (isHeld == true) и точка удержания существует (Point != null), то объект автоматически перемещается в позицию этой точки. Метод выполняется каждый кадр, и положение объекта пересчитывается по формуле Point.pos + Point.TransformDirection(localOffset), тем самым обеспечивается перемещение вместе с игроком. На время удержания отключаются физические взаимодействия объекта.
На рисунке 2 показана возможность прикрепления массы.

Рис. 2. Прикрепление массы (заземление). Примечание: составлено авторами на основе полученных данных в ходе исследования
Скрипт GroundClamp отвечает за подключение заземляющего зажима («массы») к рабочему столу перед началом сварки (листинг 2), который необходим для реализации обязательного этапа подготовки к сварке, приближая тренажёр к реальным условиям работы.
Листинг 2. Фрагмент скрипта для заземления
public void AttachToTable(Transform attachPoint){
requiredAttachPoint = attachPoint;
transform.pos = attachPoint.pos;
transform.rotat = attachPoint.rotat;
GetComponent<Rigidbody>().isKinematic = true;
isAttached = true;
}
Зажим закрепляется в определённом месте на рабочем столе, что видно на рисунке 2, после закрепления действие считается выполненным.
На рисунке 3 показан этап непосредственной сварки.
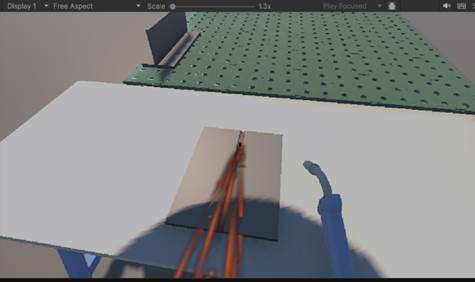
Рис. 3. Процесс сваривания (соединения). Примечание: составлено авторами на основе полученных данных в ходе исследования
Листинг 3. Участок скрипта WelderScript
if (isWelding) {
Ray ray = Camera.main.ScreenPointToRay(new Vector3(Screen.width / 2, Screen.height / 2, 0));
if (Physics.Raycast(ray, out RaycastHit hit, weldRange)) {
WeldableObject weldable = hit.collider.GetComponent<WeldableObject>();
if (weldable != null){ weldable.Weld(Time.deltaTime * weldSpeed); } }
}
Скрипт WelderScript управляет логикой сварочного процесса, осуществляя проверку, выполнены ли обязательные условия для начала работы (листинг 3). После этого при нажатии кнопки мыши запускается эффект сварки с появлением шва и искр.
В ходе выполнения сварки из центра экрана создаётся луч, который определяет, на какой объект направлен сварочный аппарат. Если луч попадает на объект в пределах заданной дистанции weldRange, программа проверяет, есть ли у него компонент WeldableObject. Если такой компонент найден, вызывается метод Weld(), который постепенно увеличивает степень сварки с учётом времени кадра и скорости weldSpeed.
Сначала обучаемый должен подготовить рабочее место и средства защиты, и только после этого система разрешает сваривание. В процессе сварки важно соблюдать траектории и угол, для обеспечения ровного шва.
Отдельно приведем аргументы, почему в процессе создания тренажера решили остановиться на трехмерной (3D) версии, а не на приложении виртуальной реальности (VR) [13-15].
3D-версия проекта была выбрана как основная, потому что работает на обычных персональных компьютерах, не требует VR-оборудования и является доступной большему числу студентов.
Все модели и сцены полностью готовы для VR-порта на гарнитуре виртуальной реальности Pico.
В перспективе планируется добавление ручной дуговой сварки (MMA) и аргонодуговой (TIG); добавление новых локаций; создание системы автоматической оценки действий обучающегося; формирование тестов и обучающих сценариев; полноценная VR-версия для Pico.
Использование тренажёра как общего модуля для обучения студентов СПО и ВО позволяет синхронизировать содержание обучения, сократить разрыв между практическими навыками выпускников колледжей и теоретической базой студентов вузов.
Заключение
Представленный 3D-тренажёр сварщика демонстрирует возможности цифрового обучения при подготовке специалистов среднего профессионального и высшего образования. Разработка позволяет безопасно и доступно отрабатывать реальный технологический процесс сварки, формировать базовые практические и инженерные компетенции и служит инструментом интеграции образовательных программ среднего профессионального и высшего образования.
Конфликт интересов
Финансирование
Библиографическая ссылка
Кравцов А.Е., Белозерова С.И. СОЗДАНИЕ И ПРИМЕНЕНИЕ 3D-ТРЕНАЖЁРА СВАРЩИКА ПРИ ПРОЕКТИРОВАНИИ ОБРАЗОВАТЕЛЬНЫХ ПРОГРАММ ДЛЯ ИНТЕГРАЦИИ ПОДГОТОВКИ СПЕЦИАЛИСТОВ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО И ВЫСШЕГО ОБРАЗОВАНИЯ // Современные проблемы науки и образования. 2026. № 5. ;URL: https://science-education.ru/ru/article/view?id=34619 (дата обращения: 29.07.2026).
DOI: https://doi.org/10.17513/spno.34619