



На тепловых электростанциях используются классические ПИД-регуляторы. Из-за того, что регулируемые параметры в барабанных котлах являются нелинейными с широким диапазоном регулирования, применение упомянутых регуляторов в данном случае малоэффективно, а в некоторых случаях вообще являются некорректным. При использовании классических ПИД-регуляторов из-за сложного взаимного влияния контуров регулирования в барабанном котлоагрегате точная компенсация этого влияния принципиально невозможна. Применяемые в настоящее время автоматические схемы регулирования экономичности процесса горения паровых барабанных котлов ТЭС не соответствуют требованиям энергосбережения. Существующие схемы регулирования не позволяют настроить технологический процесс на устойчивую работу с необходимой точностью в связи с использованием классических ПИД-регуляторов и типовых нечетких регуляторов.
Таким образом, актуальность данного исследования обусловлена следующими проблемами:
- существующие на сегодняшний момент системы управления паровым котлом не позволяют повысить КПД тепловых электростанций, а в некоторых случаях, напротив, уменьшают энергоэффективность;
- существующие схемы регулирования не позволяют настроить технологический процесс на устойчивую работу с необходимой точностью.
Цель исследования
Данныепроблемы определили цель исследования, заключающуюся в минимизацииэнергозатрат в барабанном паровом котлеза счет внедрения и программной реализации автоматической системы управления, реализованной на основе нечеткой адаптации коэффициентов ПИД-регуляторов, использующей четкие терммножества.
Материалы и методы исследования
Для достижения поставленной цели в ранних работах [1] разработана структурная схема регулирования объектом с нечеткой адаптацией коэффициентов ПИД-регуляторов, использующая четкие терм-множества (см. рис.1). В основу данной схемы положено представление физических величин в виде совокупности четких множеств. На рис.2 представлены перекрестные связи входных и выходных величин, характеризующие котел как динамический многомерный объект управления с широким диапазоном регулирования параметров.
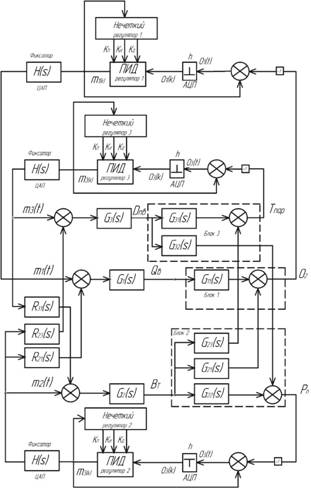
Рис. 1. Структурная схема управления парового котла с адаптацией коэффициентов ПИД-регуляторов на основе нечетких регуляторов с четкими термами
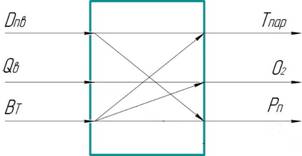
Рис. 2. Основные участки технологического процесса горения и парообразования котла
Использование одномерных систем автоматического управления подобными параметрами с перекрестными связями некорректно. Необходимо исключить перекрестную связь, но при этом учитывать влияние управления одним параметром на другие параметры объекта управления (давление пара Pп, температура пара Тпар, содержание кислорода в уходящих газах О2).
Новизна исследования заключается в том, что измененаструктурная схема управления объектом [3], в которой, помимо регулирования значений технологических параметров, производится полная компенсация взаимного влияния всех контуров регулирования, так как серьезным недостатком систем автоматического управления вышеуказанными параметрами многомерного объекта является влияние управления одним параметром на другие параметры объекта управления.
Для устранения указанных недостатков предлагается использоватьизвестные основные положения теории интеллектуальных систем управления на основе нечетких регуляторов, автоматического регулирования, методы экспериментальных исследований, а также программные продукты (MatLab, FuzzyTECH).
Результаты исследования
Практическая значимостьисследования состоит в разработке step-time алгоритма фаззификации непрерывных физических величин технологического процесса котла, который в отличии от известного any-time алгоритма заключается в двукратном сокращении суммарного числа операций сравнения, а также в исключении из структуры алгоритма программных счетчиков и блока модификации, что позволит исключить ряд промежуточных переменных и снизить нагрузку на микропроцессор НР, ниже остановимся на его описании более подробно.
Step-time алгоритм фаззификации непрерывных физических величин технологического процесса котла в контурах «Давление пара – расход топлива», «Температура пара – расход питательной воды»представлен на рис. 3. Для данного step-time алгоритма интерпретации непрерывных физических величин и в виде эквивалентной совокупности аргументов двузначной логики характерны следующие основные особенности:
а) завершение цикла сканирования после определения четкого терма непрерывной физической величины, значение которого равно логической единице в текущей момент времени;
б) двукратное сокращение суммарного числа операций сравнения, необходимых для интерпретаций четких термов, по сравнению с any-time алгоритмом фаззификации;
в) отсутствие в структуре алгоритма программных счетчиков и блоков модификации позволяет устранить избыточность «внутренних» переменных регулятора и снизить нагрузку на его микропроцессор.
Проведенный ранее вычислительный эксперимент [4] применительно к нечеткому логическому регулятору позволил количественно оценить эффективность минимизации времени отклика с помощью step-time алгоритма.
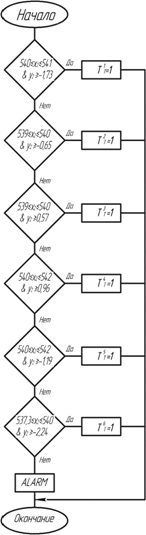
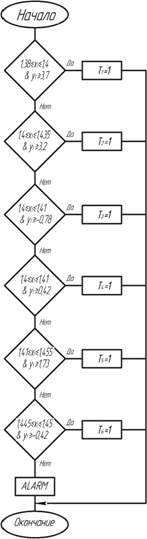
Рис. 3. Логические схемы step-time алгоритма фаззификации НР с четкими терм множествами
На данный момент существует большое количество разнообразных программных средств для реализации алгоритмов работы фаззификаторов и дефаззификаторов нечетких регуляторов в качестве самостоятельных функциональных блоков на языках программирования, определенных в международном стандарте IEC 61131-3, такие как TRACE MODE, MatLab, SIMATIC STEP, fuzzyTECH и др. Рассмотрим особенности программной реализации данного НР с адаптацией ПИД-регулятора на основе четких терм-множеств. Они состоят из следующих основных элементов:
- системы фаззификаторов и дефаззификаторов входных и выходных переменных НР;
- блока логического вывода, который состоит из системы управляющих воздействий и механизма формирования идентификационного правила, антецедент которого в данный момент времени равен логической единице.
Система фаззификаторов НР включает в себя всю совокупность блоков фаззификации, каждый из которых имеет основные параметры:
- наименование блока фаззификации;
- количество четких термов непрерывной физической величины, которые используются для ее фаззификации;
- характер расположения четких термов входных и выходных параметров регулятора на числовой оси, а также задание переднего и заднего фронтов четких термов в виде жесткого или мягкого неравенства.
Значения интервалов четких термов задаются непосредственно в структуре фаззификаторов. Следует отметить, что блоки фаззификации НР, относящиеся к отдельным контурам, внутри системы фаззификаторов не связаны между собой ни логически, ни функционально, что позволяет создавать новые и удалять имеющие блоки, изменять основные параметры и значения интервалов четких термов. Необходимо учитывать только тот факт, что фаззификаторы внутри системы не могут иметь одинаковые имена.
Все это предопределяет выбор программной среды для реализации алгоритма фаззификации данного НР в контурах регулирования парового котла.
Для программной реализации нечеткой логики на сегодняшний день широко используется инструментальная среда MatLab, позволяющая охватить рабочий диапазон значений переменных НР, но с учетом особенностей технологического процесса парового котла имеет низкий уровень адекватности к реальному процессу и высокие погрешности, связанные с наличием четких терм-множеств. Вследствие этого, применение программной среды MatLab и подобных инструментальных сред для реализации алгоритма step-time НР с адаптацией ПИД-регулятора с четкими терм-множествами будет некорректно.
Для уменьшения погрешностей и увеличения быстродействия системы предлагается использовать программу fuzzyTech. Хотя система MatLab и программа fuzzyTech использует единые принципы нечеткого моделирования, существует несколько принципиальных отличий нечеткого вывода FLS в программе fuzzyTech:
- Проект системы нечеткого вывода в fuzzyTech может иметь несколько блоков правил нечетких продукций, каждый из которых содержать собственные входные и выходные лингвистические переменные. При этом отдельные блоки могут соединяться между собой последовательно и параллельно, что как раз соответствует предложенной структурной схеме управления паровым котлом.
- Кроме входных и выходных лингвистических переменных проекты fuzzyTech могут иметь так называемые промежуточные лингвистические переменные. Эти переменные появляются в тех случаях, когда блоки правил соединяются последовательно, т.е. выход одного блока правил соединяется с входом другого блока правил.
- Все операции по разработке, редактированию, отладке и анализу проектов в программе fuzzyTech выполняются в графическом интерактивном режиме, при этом для создания прототипов проектов и спецификации их отдельных компонентов могут быть использованы различные мастера (Wisards).
- На основе разработанного и отлаженного проекта программой fuzzyTech может быть сгенерирован программный код реализации системы нечеткого вывода на одном из языков программирования (С, Java, MS Visual C++, MS VisualBasic, MS VBA и др.). В дальнейшем полученные подобным образом листинги программного кода могут быть откомпилированы для той или иной вычислительной платформы и использованы независимо от программы fuzzyTech для реализации в нечетких микроконтроллерах.
Все выше перечисленное обуславливает применение fuzzyTech как инструментальную среду для реализации алгоритма фаззификации НР с адаптацией ПИД-регулятора, использующая четкие терм множества, в контурах управления паровым котлом.
Целью моделирования в среде fuzzyTech является система управления технологическим процессом парового котла, которая использует четкие терм-множества для адаптации ПИД-регулятора. В графическом интерактивном режиме получена 3-D модель (см. рис.4) управления процессом горения и парообразования в паровом котле, анализ которой показал, что отсутствие разрыва на поверхности модели соответствует адекватности к реальному паровому котлу.
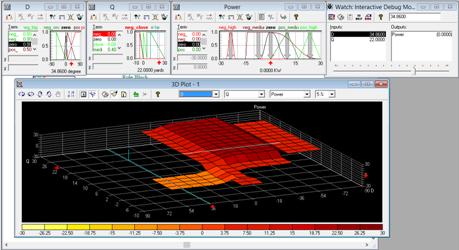
Рис.4. 3-D модель управления процессом горения и парообразования в паровом котле
Выводы
Предложенный step-time алгоритм фаззификации непрерывных физических величин технологического процесса котла, который в отличие от известного any-time алгоритма заключается в двукратном сокращении суммарного числа операций сравнения, а также в исключении из структуры алгоритма программных счетчиков и блока модификации, что позволило исключить ряд промежуточных переменных и снизить нагрузку на микропроцессор НР, а соответственно увеличить быстродействие, качество регулирования и, как результат, повысить КПД котла.
Анализ программной реализацииНРпоказал адекватность модели к реальному паровому котлу.
Рецензенты:Муравьева Е.А., д.т.н.,доцент, зав. кафедрой АТИС, филиал ФГБОУ ВПО УГНТУ,г. Стерлитамак;
Шулаев Н.С., д.т.н., профессор, зав. кафедрой информатики, математики и физики, филиал ФГБОУ ВПО УГНТУ,г. Стерлитамак.
Библиографическая ссылка
Богданов А.В. ПРОГРАММНАЯ РЕАЛИЗАЦИЯ НЕЧЕТКОГО РЕГУЛЯТОРА В СИСТЕМЕ УПРАВЛЕНИЯ ПАРОВОГО КОТЛА ТЭС ДЛЯ АДАПТАЦИИ ПИД-РЕГУЛЯТОРА // Современные проблемы науки и образования. 2015. № 2-2. ;URL: https://science-education.ru/ru/article/view?id=23149 (дата обращения: 15.06.2026).