



Одним из направлений решения проблемы повышения плавности хода машинно-тракторного агрегата является применение упругодемпфирующих приводов ведущих колес трактора [1-4]. Предлагаемая конструкция газогидравлического упругодемпфирующего привода ведущих колес разработана с учетом возможности применения его в приводах ведущих колес тракторов [5-7].
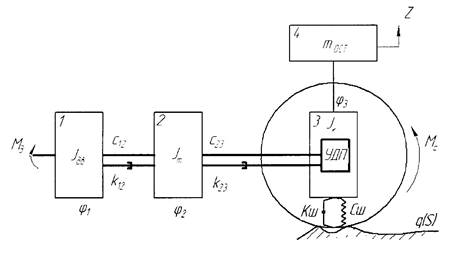
Рис. 1. Структурная схема 4-массовой динамической модели
Теоретические исследования. Исследование плавности хода трактора наиболее целесообразно проводить на основе 4-массовой динамической модели. Структурная схема модели может быть представлена в следующем виде (рис. 1): ![]() – моменты инерции двигателя и ведущие части сцепления, момент инерции трансмиссии и момент инерции ведущих колес трактора;
– моменты инерции двигателя и ведущие части сцепления, момент инерции трансмиссии и момент инерции ведущих колес трактора; ![]() – масса остова трактора, приходящаяся на ведущие колеса трактора;
– масса остова трактора, приходящаяся на ведущие колеса трактора; ![]() – жесткость первичного и вторичного вала двигателя, жесткость вала трансмиссии и жесткость шин ведущих колес трактора; УДП – упругодемпфирующий привод ведущих колес трактора; Z – вертикальное перемещение массы остова трактора; Мd, Mc – момент двигателя и сопротивление движения. После составления структурной схемы МТА и ТТА составляем систему дифференциальных уравнений движения, формула (1) [8-11]:
– жесткость первичного и вторичного вала двигателя, жесткость вала трансмиссии и жесткость шин ведущих колес трактора; УДП – упругодемпфирующий привод ведущих колес трактора; Z – вертикальное перемещение массы остова трактора; Мd, Mc – момент двигателя и сопротивление движения. После составления структурной схемы МТА и ТТА составляем систему дифференциальных уравнений движения, формула (1) [8-11]:
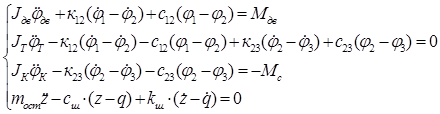 , (1)
, (1)
где: k12, c12 – коэффициенты демпфирования и жесткости трансмиссии, приведенные к валу двигателя; k23, c23 – коэффициенты демпфирования и жесткости ведущих колес и УДП, приведенные к валу двигателя; q – неровность профиля пути; cш, kш – жесткость шин трактора и коэффициента демпфирования шины; z – вертикальное перемещение массы остова, над ведущим задним колесом; ![]() – масса остова трактора;
– масса остова трактора; ![]() ,
, ![]() ,
, ![]() – углы поворота коленчатого вала двигателя, трансмиссии и ведущих колес.
– углы поворота коленчатого вала двигателя, трансмиссии и ведущих колес.
Задача рационального проектирования динамических систем ТТА и МТА с использованием УДП заключается в нахождении таких параметров или характеристик, которые обеспечили бы минимальные ускорения остова [2]. Рациональный выбор жесткости УДП ведущих колес выполняется из соображения получения минимума дисперсии колебаний момента и остова (рис. 2). Результаты теоретических исследований показали, что рациональное значение жесткости составило С23=100…146 кНм/рад, приведенной к шинам задних колес трактора.
Из рисунка 2 видно, что при эксплуатации трактора с жесткостью упругих приводов ведущих колес С=100…146 кНм/рад, происходит минимизация колебаний момента на колесах ∆Мк до 40%, при этом амплитуда вертикальных ускорений снижается на 40-60% за счет уменьшения колебаний радиуса качения ведущих колес и момента сопротивления. Наглядное представление о рациональном выборе жесткости УДП по минимизации экстремумов спектральной плотности колебаний остова трактора ![]() показано на рисунках 3-4 (V- и VII-передача).
показано на рисунках 3-4 (V- и VII-передача).
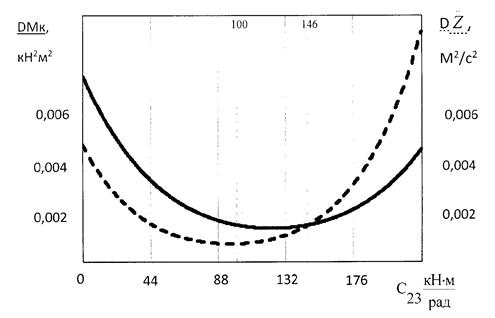
Рис. 2. Рациональный выбор жесткости УДП ведущих колес
Снижение жесткости приводит к смещению амплитуд колебаний моторно-трансмиссионной установки в низкочастотную область, а рациональный выбор жесткости привода приведен на пахоте стерня колосовых (рис. 3) и при работе на транспорте, грунтовая дорога (рис. 4).
На режиме пахота (рис. 3) за счет установки УДП пики вертикальных колебаний смещаются в область низких частот 1,2 Гц и снижаются на 40%. При работе на транспорте амплитудные максимумы вертикальных ускорений (рис. 4) снижаются до 60%.
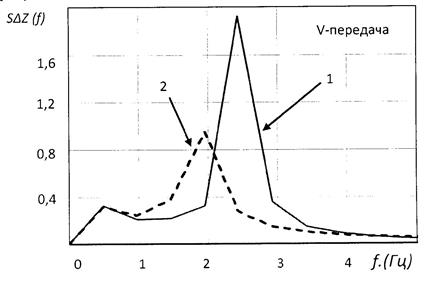
Рис. 3. Рациональный выбор жесткости УДП по минимизации экстремумов спектральной плотности колебаний остова трактора
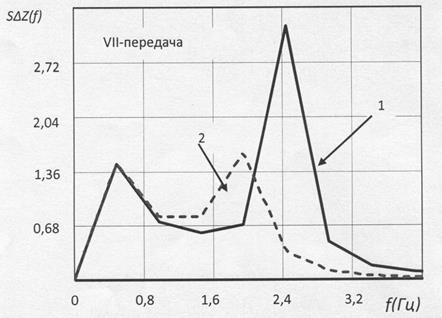
Рис. 4. Спектральная плотность вертикального ускорения трактора МТЗ-80.1 при работе с прицепом 2ПТС-4 с грузом массой 6,5 т:
1) С12=500 кНм/рад, С23=500 кНм/рад, k12=0,45 кНмс/рад, k23=0,45 кНмс/рад; 2) с УДП С12=100 кНм/рад, С23=200 кНм/рад, k12=2,93 кНмс/рад, k23=2,95 кНмс/рад
Экспериментальные исследования. Для подтверждения теоретических исследований были проведены полевые испытания с целью определения расхождения теоретических и практических результатов. В качестве объекта исследования был выбран машинно-тракторный агрегат, состоящий из колесного универсально-пропашного трактора Минского тракторного завода тягового класса 1,4 в агрегате с двуосным прицепом 2ПТС-4 и плугом ПЛН-3-35. Привод ведущих колес (рис. 5-6) включает ступицу 1, установленную на подшипниках на ведущей оси колеса 2. Внутренняя полость ступицы разделена на две полости 3 и 4 лопастью 5.
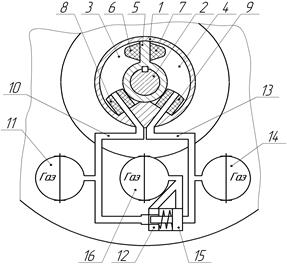
Рис. 5. Схема УДП ведущих колес трактора МТЗ-80.1

Рис. 6. Газогидравлический привод на ведущих колесах
На рабочих поверхностях лопасти 5 установлены резиновые упоры 6 и 7, которые взаимодействуют с упорами 8 и 9, установленными на внутренних поверхностях ступицы. Полость 3 соединена магистралью 10 с газогидравлическим аккумулятором 11 и гидроклапаном 12 обратного действия. Полость 4 соединена магистралью 13 с газогидравлическим аккумулятором 14 и через гидроклапан 15 прямого действия с газогидравлическим аккумулятором 16. Работа привода колеса транспортного средства заключается в следующем. При торможении лопасть 5 воздействует на рабочую жидкость полости 4, которая по магистрали 13 поступает в газогидравлический аккумулятор 14. По мере поворота лопасти 5 и зарядки газогидравлического аккумулятора 14 жидкость открывает на гидроклапан 15 и поступает в газогидравлический аккумулятор 16. При трогании лопасть 5 воздействует на рабочую жидкость полости 3, которая по магистрали 10 поступает к газогидравлическому аккумулятору 11 и гидроклапану 12. Это позволяет трактору с агрегатом производить трогание с места без значительного буксования. При трогании значительно повышается давление рабочей жидкости и открывается гидроклапан 12 за счет сжатия пружины, что позволяет дополнительно аккумулировать энергию, в газогидравлическом аккумуляторе 16. После окончания трогания и начала разгона транспортного агрегата ведущий момент, действующий на ось 2 и лопасть 5, практически мгновенно уменьшается в несколько раз, а, следовательно, давление в полости 3 ступицы снижается, и в это время аккумулирующая жидкость при торможении и трогании из газогидравлических аккумуляторов 16 и 11 под большим давлением поступает в полость 4 ступицы 1. Это позволяет дополнительно повысить разгонные качества трактора за счет энергии, аккумулирующей в газогидравлических аккумуляторах 16 и 11 при торможении и трогании.
Результаты экспериментальных исследований показали, что остов трактора раскачивается вследствие изменения крутящего момента на ведущих колесах, что приводит к колебанию поступательной скорости движения МТА и изменению радиуса качения колеса. Введение упругодемпфирующих приводов ведущих колес тракторов снижает колебание крутящих моментов на ведущих колесах и колебание поступательной скорости агрегата в целом. Испытания привода на укатанной грунтовой дороге показали, что трактор МТЗ-80.1, оборудованный УДП с прицепом 2ПТС-4, снижает буксование на 3-6%, повышает производительность на 4-6%, снижает удельный расход топлива на 6-8%.
Испытания на пахоте с дорожным фоном стерня колосовых показали, что с упругодемпфирующим приводом трактор МТЗ-80.1 с плугом ПЛН-3-35 снижает буксование на 10-12% и расход топлива на 12-14%. При этом повышается производительность на 10-12%, а достоверность результатов подтверждается достаточно хорошей согласованностью экспериментальных и теоретических данных, в среднем на 7…8%.
Выводы. Рациональный вариант упругодемпфирующего привода обоснован по результатам дорожно-полевых испытаний, которые показали, что на транспортных работах производительность увеличивается и снижается удельный расход топлива на 4…8%. На пахоте производительность повышается на 10…12%, а расход топлива снижается на 12…14%.
Рецензенты:
Кондрашова Е.В., д.т.н., профессор кафедры технического сервиса и технологии машиностроения ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж;
Астанин В.К., д.т.н., профессор, зав. кафедрой технического сервиса и технологии машиностроения ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж.
Библиографическая ссылка
Бабанин Н.В. УЛУЧШЕНИЕ ПЛАВНОСТИ ХОДА МАШИННО-ТРАКТОРНОГО АГРЕГАТА НА БАЗЕ ТРАКТОРА КЛАССА 1,4 С УПРУГОДЕМПФИРУЮЩИМ ПРИВОДОМ НА ВЕДУЩИХ КОЛЕСАХ // Современные проблемы науки и образования. 2015. № 2-2. ;URL: https://science-education.ru/ru/article/view?id=21897 (дата обращения: 01.07.2026).