



В настоящее время при профессиональной подготовке водительского состава повсеместное распространение получили автомобильные тренажеры, обеспечивающие полную безопасность и высокую экономичность процессов обучения. К сожалению, ряд модификаций обладает условностью восприятия дорожной обстановки, связанной либо со статичностью кабин, или жесткой программой имитируемой ситуации, не связанной с управляющими действиями обучаемого. Поэтому используются ситуационные автотренажеры, позволяющие значительно повысить эффективность обучения. В них управление в процессе обучения производится вычислительным устройством, связанным с системой имитации дорожной обстановки. Предусматривается возможность воспроизведения неожиданного появления пешехода на проезжей части, внезапный выезд на перекресток других транспортных средств и т.д.
Одной из важнейших задач при создании тренажных и обучающих комплексов [1,4,5,6,7,9] для подготовки операторов мобильных систем является установление и последующее ранжирование стимулов (информативных сигналов), на основе которых человек-оператор и производит формирование управляющих воздействий (реакции на входные сигналы). Она тесно связана с определением психофизиологического статуса оператора (устанавливается на основе клинико-экспериментальной оценки). Обе задачи здесь решаются на основе рассмотрения человека-оператора как элемента многомерного информационного канала и по существу сводятся к решению основной задачи статистической теории распознавания образов. Вторая задача на первом этапе решается в условиях предельного случая (для контингента с выраженными характеристиками принятия решения; такой подход особенно часто используется в психиатрии). Участие в исследованиях практических психологов и психиатров в значительной степени позволили оценить комплексы стимулов при принятии решений операторами для решения конкретных задач.
Математическое моделирование замкнутой человеко-машинной системы (эргатическая система) существенно усложняется в связи с действием в ней организмического принципа (оператор достраивает свои параметры организмически оптимально). Практически авторами решалась частная задача идентификации с использованием результатов данных нормального функционирования. В частности, определялись [4,9]:
-
распределение вероятностей дискретных значений фазовых координат,
-
условные вероятности дискретных значений управляющих воздействий,
-
числовые характеристики фазовых координат и управляющих воздействий, как случайных функций,
-
меры зависимостей между управляющими воздействиями и значениями выходных координат,
-
характеристики каналов управления, как дискретных информационных каналов, в том числе характеристики дублирований и взаимодействия в передаче стимулов (выходных координат) при выборе соответствующих реакций,
-
корреляционные функции и спектральные характеристики фазовых координат и управляющих воздействий.
Обычно в качестве количественных характеристик зависимостей случайных величин рассматриваются смешанные центральные моменты и их аналоги, в частности, коэффициенты корреляции. Однако эти характеристики в ряде случаев слабо связаны с зависимостью случайных величин; правда, в некоторых случаях получаются вполне удовлетворительные результаты (например, в случае линейной функциональной зависимости).
Поэтому использовались количественные характеристики, на наш взгляд, более отражающие суть явлений. Это подтвердилось при исследовании ряда задач распознавания образов и диагностики. В качестве меры зависимости ![]() случайного события
случайного события ![]() от случайного события
от случайного события ![]() принималась условная вероятность
принималась условная вероятность ![]() ; в общем случае
; в общем случае ![]() . Мерой зависимости события
. Мерой зависимости события ![]() от событий
от событий ![]() рассматривался вектор (
рассматривался вектор (![]() ,
,![]() ,…,
,…,![]() ). В случае, когда
). В случае, когда ![]() – независимые события и
– независимые события и ![]() , то
, то ![]() рассматривается как линейная комбинация событий
рассматривается как линейная комбинация событий ![]() :
:
![]() ;
;
здесь речь идет не о линейной функциональной зависимости ![]() от
от ![]() (может быть нелинейной и более сложной). Для дискретной случайной величины
(может быть нелинейной и более сложной). Для дискретной случайной величины ![]() в качестве меры зависимости принималась
в качестве меры зависимости принималась ![]() ,
, ![]() – значения случайных величин
– значения случайных величин ![]() и
и ![]() соответственно,
соответственно, ![]() – условная вероятность события
– условная вероятность события ![]() относительно события
относительно события ![]() ,
,![]() – вероятность события
– вероятность события ![]() . При вычислении
. При вычислении ![]() по статистическим данным (по выборке объема N) полезно
по статистическим данным (по выборке объема N) полезно ![]() вычислять как по всей выборке, так и по ее репрезентативным частям (с минимальным пересечением) и взять среднее значение.
вычислять как по всей выборке, так и по ее репрезентативным частям (с минимальным пересечением) и взять среднее значение.
Для селекции информативных сигналов и решения связанной с этим задачи диагностики использовался метод последовательного распознавания. В последовательной процедуре вместо одного порога, как в классической процедуре, задаются два порога: проверяемая гипотеза (основная или нулевая) ![]() и альтернативная гипотеза (конкурирующее с ней предположение)
и альтернативная гипотеза (конкурирующее с ней предположение) ![]() . Вследствие ограниченности выборки, полученной из генеральной совокупности, по которой проверяется гипотеза
. Вследствие ограниченности выборки, полученной из генеральной совокупности, по которой проверяется гипотеза![]() , возможны ошибки, как в ту, так и в другую сторону. В небольшой доле a случаев гипотеза
, возможны ошибки, как в ту, так и в другую сторону. В небольшой доле a случаев гипотеза ![]() может оказаться отвергнутой, в то время как на самом деле она является справедливой, или, наоборот, в доле b случаев принимается гипотеза
может оказаться отвергнутой, в то время как на самом деле она является справедливой, или, наоборот, в доле b случаев принимается гипотеза ![]() , в то время как она является ошибочной, а справедливой оказывается
, в то время как она является ошибочной, а справедливой оказывается ![]() .
.
Выбор величины уровня значимости a (ошибка первого рода – вероятность a ошибочного отклонения гипотезы![]() ) зависит от сопоставления потерь вследствие ошибочных заключений (при a = 0,05 в 5 случаях из 100 ошибочно отвергается гипотеза
) зависит от сопоставления потерь вследствие ошибочных заключений (при a = 0,05 в 5 случаях из 100 ошибочно отвергается гипотеза![]() ); вероятность b принятия неправильной гипотезы
); вероятность b принятия неправильной гипотезы ![]() – ошибка второго рода. Чем весомее потери от ошибочного отказа от
– ошибка второго рода. Чем весомее потери от ошибочного отказа от![]() , тем меньше выбирается a (например, целесообразней признать доброкачественную опухоль онкологическим заболеванием, чем наоборот).
, тем меньше выбирается a (например, целесообразней признать доброкачественную опухоль онкологическим заболеванием, чем наоборот).
Рассмотрим подмножество выборок, которые приводят к гипотезе H1 , и определим вероятность того, что последовательный процесс закончится принятием гипотезы H1 (отклонением![]() ). Эта вероятность равна или меньше a в случае, когда на самом деле имеет место гипотеза
). Эта вероятность равна или меньше a в случае, когда на самом деле имеет место гипотеза![]() , и равна или меньше 1 - b, если на самом деле имеет место гипотеза
, и равна или меньше 1 - b, если на самом деле имеет место гипотеза![]() . Последнее положение следует из того, что по определению вероятность принятия
. Последнее положение следует из того, что по определению вероятность принятия ![]() , когда верна
, когда верна![]() , равна b. Доказана сходимость последовательной процедуры за конечное число шагов n, поэтому можно утверждать, что вероятность отклонения
, равна b. Доказана сходимость последовательной процедуры за конечное число шагов n, поэтому можно утверждать, что вероятность отклонения ![]() (принятия
(принятия ![]() ), когда верна
), когда верна ![]() , должна быть равна 1 - b. На каждом шаге (включая последний) справедливо соотношение
, должна быть равна 1 - b. На каждом шаге (включая последний) справедливо соотношение ![]() , откуда следует
, откуда следует ![]() или
или ![]() ; аналогично
; аналогично ![]() . Так что: 0 <
. Так что: 0 < ![]() £ B £ 1 £ A £
£ B £ 1 £ A £ ![]() .
.
Практически последовательная процедура будет завершена, когда выборка перестанет попадать в область, определяемую двойным неравенством ![]() .
.
Неотрицательный результат статистической проверки гипотезы ![]() не означает, что высказанное предположительное утверждение является наилучшим, единственно подходящим. Из этого лишь следует, что она не противоречит имеющимся выборочным данным. При этом таким же качеством могут обладать, наряду с
не означает, что высказанное предположительное утверждение является наилучшим, единственно подходящим. Из этого лишь следует, что она не противоречит имеющимся выборочным данным. При этом таким же качеством могут обладать, наряду с![]() , и другие гипотезы [8].
, и другие гипотезы [8].
Вероятность каждого из возможных состояний ![]() объекта по методу последовательного распознавания (следует из формулы Байеса; позволяет установить вероятности состояний
объекта по методу последовательного распознавания (следует из формулы Байеса; позволяет установить вероятности состояний ![]() при наличии комплекса признаков (симптомов)
при наличии комплекса признаков (симптомов) ![]() , вообще говоря, зависимых) определяется в виде:
, вообще говоря, зависимых) определяется в виде:
 .
.
При этом отношение
![]()
показывает, во сколько состояние ![]() вероятнее состояния
вероятнее состояния ![]() .
.
Значение количества ![]() признаков устанавливается исходя из заранее выбранных допустимых уровней диагностических ошибок (после достижения порога
признаков устанавливается исходя из заранее выбранных допустимых уровней диагностических ошибок (после достижения порога ![]() или
или ![]() принимается решение: «состояние
принимается решение: «состояние ![]() » или «состояние
» или «состояние ![]() »). При последовательной процедуре распознавания для пары (
»). При последовательной процедуре распознавания для пары (![]() ) возможны варианты: состояние
) возможны варианты: состояние ![]() , или
, или ![]() , или имеющейся информации недостаточно для принятия решения с намеченным уровнем надежности (или существует промежуточное состояние между
, или имеющейся информации недостаточно для принятия решения с намеченным уровнем надежности (или существует промежуточное состояние между ![]() и
и ![]() ).
).
Для принятия одного из решений правая часть последнего равенства сравнивается с диагностическим порогом. Если ![]() – ошибочная диагностика состояния,
– ошибочная диагностика состояния, ![]() – ошибка пропуска состояния;
– ошибка пропуска состояния; ![]() – ошибки второго и первого родов, то отношение вероятностей правильных и ошибочных диагнозов состояний
– ошибки второго и первого родов, то отношение вероятностей правильных и ошибочных диагнозов состояний ![]() равно
равно ![]() . Аналогично отношение ошибочных и правильных диагнозов
. Аналогично отношение ошибочных и правильных диагнозов ![]() .
.
При ![]() принимается состояние
принимается состояние ![]() ; при
; при ![]() – состояние
– состояние ![]() ; если
; если ![]() , то последовательная процедура продолжается.
, то последовательная процедура продолжается.
Если под классами понимать стили управления, а под признаками – источники информации, то решение задачи прогнозирования управления на тренажных комплексах легко осуществляется с использованием последовательной процедуры распознавания. Информация о взаимодействии двух входов ![]() и
и ![]() без учета дублируемой информации для различных классов управлений (по выходу) определится величиной
без учета дублируемой информации для различных классов управлений (по выходу) определится величиной
![]() ,
,
где ![]() ,
, ![]() – соответственно количество информаций, передаваемых от
– соответственно количество информаций, передаваемых от ![]() к
к ![]() и парой
и парой ![]() к
к ![]() .
.
Эффективность использования комплексов для обучения операторов определяется имитационными характеристиками тренажера, определяющими формирование оператором управляющих воздействий.
Ограничимся эргатическими системами, для которых уравнения движения имеют вид:
![]()
![]() (1)
(1)
или
![]() ,
, ![]() ,
, ![]() ,
,
![]() ;(1’)
;(1’)
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
 (2)
(2)
В дискретной форме система (1’) представится в виде:
![]() ,
, ![]() ,
,
![]() ,
, ![]() ;(3)
;(3)
![]() ,
,![]() ,
,![]() ,
, ![]() .
.
Справедливо
![]() .(4)
.(4)
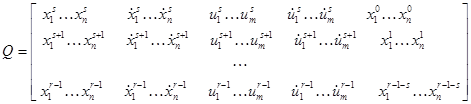
Обычно всегда имеются синхронные измерения ![]() , полученные в условиях нормальной эксплуатации. Так что можно считать известными
, полученные в условиях нормальной эксплуатации. Так что можно считать известными
![]() ,
,
![]() .
.
Идентификация сводится к определению оценок компонент матрицы
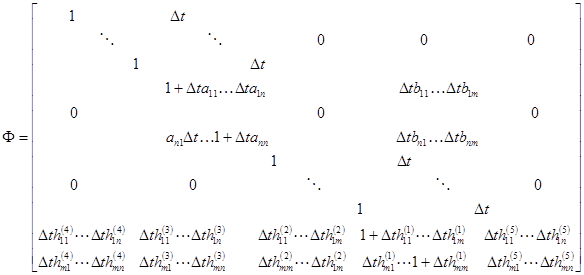
из условия ![]() ,
, ![]() - оценка
- оценка ![]() . Справедливо
. Справедливо ![]() ,
,
 ,
,
т – символ транспонирования, ![]() .
.
Непосредственно из вида ![]() , ее блочной структуры, при заданной системе уравнений вида (1) появляется возможность идентифицировать параметры как объекта, так и оператора.
, ее блочной структуры, при заданной системе уравнений вида (1) появляется возможность идентифицировать параметры как объекта, так и оператора.
Рассматриваемый алгоритм многократно использовался [2,3] при параметрической идентификации как продольного, так и бокового движений эргатической системы (для короткопериодической составляющей ограничивались случаем  ,
,  ,
,![]() ).
).
Рецензенты:
Родионов Ю.В., д.т.н., профессор, заведующий кафедрой «Эксплуатация автомобильного транспорта», декан автомобильно-дорожного института ПГУАС, г. Пенза;
Кошев А.Н., д.х.н., профессор, профессор кафедры «Информационно-вычислительные системы» Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Гарькина И.А., Данилов А.М., Дулатов Р.Л. ЭРГАТИЧЕСКИЕ СИСТЕМЫ: УПРАВЛЕНИЕ, СЕЛЕКЦИЯ ИНФОРМАТИВНЫХ СИГНАЛОВ, МОДЕЛИРОВАНИЕ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=17621 (дата обращения: 01.07.2026).