



Введение
В известных байпасных системах (БС) основным измерительным прибором выступает индикатор визуального отсчета, что не дает возможность с высокой точностью производить измерение уровня жидкой среды в закрытых резервуарах и автоматизировать этот процесс [1, 5]. Использование в подобных байпасных измерительных системах визуальной информации МПУ накладного типа на волнах кручения позволяет успешно решить данные проблемы достаточно простым путем без реконструкции типовой байпасной камеры системы (рис. 1).
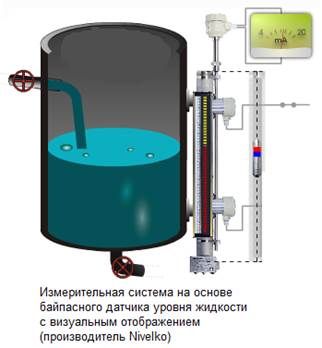
Рисунок 1 – Байпасная измерительная система
Именно такой подход модернизации известных байпасных измерительных систем технологических объектов пищевых, химических и нефтеперерабатывающих производств предлагается использовать. Для его успешной реализации необходимо провести математическое исследование поведения НМПУ на волнах кручения со сложной геометрией акустического тракта при работе в составе отмеченных систем. Подобные исследования удобно проводить на основе положений теории автоматического управления и регулирования [3].
Постановка задачи
Требуется провести исследование байпасной измерительной системы с НМПУ с использованием метода математического моделирования и теории автоматического управления и регулирования и оценить эффективность работы такой системы по частотным и временным характеристикам.
Результаты и их обсуждение
Структурная модель (схема) байпасной измерительной системы с НМПУ на волнах кручения со сложной геометрией акустического тракта приведена на рисунке 2. Она содержит собственно байпасную систему измерения уровня, имеющую два идентичных канала забора (КЗ) и слива (КС), и НМПУ, включенный в цепь обратной связи системы. Каждый из каналов имеет перекачивающий центробежный насос с гидравлическим клапаном, управляемым от электронного усилителя мощности. По командам оператора или управляющей информационной системы центробежные насосы с клапанными элементами осуществляют перекачку рабочей жидкости в резервуаре технического объекта в заданных пределах уровня ![]() . Его измерение и контроль осуществляется НМПУ.
. Его измерение и контроль осуществляется НМПУ.
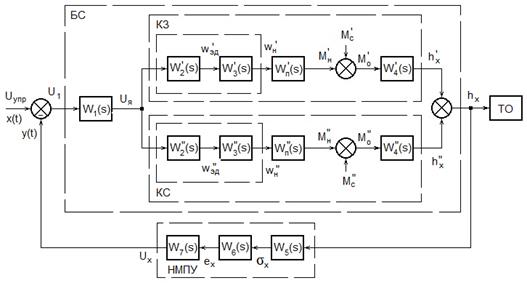
Рисунок 2 – Структурная схема байпасной измерительной системы с НМПУ
Усилительно-преобразующим элементом БС является управляемый усилитель мощности с коэффициентом ![]() , описываемый передаточной функцией вида
, описываемый передаточной функцией вида
![]() (1)
(1)
где ![]() напряжения на входе и выходе звена,
напряжения на входе и выходе звена, ![]() оператор Лапласа.
оператор Лапласа.
Перекачивающие центробежные насосы КЗ и КС имеют исполнительные электрические двигатели постоянного или переменного тока, например, электродвигатель постоянного тока (ЭДПТ), на валу которых закреплена крыльчатка. При идентичности параметров этих исполнительных устройств их можно описать следующими передаточными функциями:
![]() и (2)
и (2)
![]() (3)
(3)
где ![]() частоты вращения якоря ЭДПТ и лопастей насоса,
частоты вращения якоря ЭДПТ и лопастей насоса, ![]() коэффициенты передачи ЭДПТ и насоса,
коэффициенты передачи ЭДПТ и насоса, ![]() их постоянные времени.
их постоянные времени.
Коэффициент передачи ЭДПТ можно определить как [3]:
![]() (4)
(4)
где ![]() ток якоря ЭДПТ,
ток якоря ЭДПТ, ![]() номинальный момент на его валу. Его постоянная времени равна [3]:
номинальный момент на его валу. Его постоянная времени равна [3]:
 (5)
(5)
где ![]() номинальный момент инерции на валу ЭДПТ,
номинальный момент инерции на валу ЭДПТ, ![]() сопротивление обмоток его якоря. Следовательно, передаточная функция этих двух звеньев центробежных насосов КЗ и КС запишется следующим образом с учетом (2)–(5):
сопротивление обмоток его якоря. Следовательно, передаточная функция этих двух звеньев центробежных насосов КЗ и КС запишется следующим образом с учетом (2)–(5):
![]() (6)
(6)
В процессе перекачки рабочей жидкой среды технического объекта центробежные насосы КЗ и КС имеют электрические и механические сопротивления, интерпретируемые здесь как потери, значения которых необходимо учитывать. Значения потерь возрастают пропорционально коэффициентам вязкости (плотности) рабочей среды технического объекта. Влияние этих потерь можно описать следующей передаточной функцией [3]:
![]() (7)
(7)
где ![]() коэффициент передачи,
коэффициент передачи, ![]() постоянная сопротивления исполнительного звена,
постоянная сопротивления исполнительного звена, ![]() его момент с учетом сухого и вязкого трения,
его момент с учетом сухого и вязкого трения, ![]() электромагнитная постоянная центробежных насосов КЗ и КС с учетом допустимых нагрузок,
электромагнитная постоянная центробежных насосов КЗ и КС с учетом допустимых нагрузок, ![]() приведенный момент инерции их механической системы, учитывающий массы и размеры вращающихся механизмов,
приведенный момент инерции их механической системы, учитывающий массы и размеры вращающихся механизмов, ![]() постоянная времени якоря ЭДПТ центробежных насосов.
постоянная времени якоря ЭДПТ центробежных насосов.
Следовательно, постоянную времени ![]() можно определить как:
можно определить как:
 (8)
(8)
здесь ![]() момент на валу насосов КЗ и КС.
момент на валу насосов КЗ и КС.
При синхронной (асинхронной) работе центробежных насосов КЗ и КС открывается соответствующий гидравлический впускной или выпускной клапаны, работу которых в байпасной системе технического объекта можно описать следующей передаточной функцией:
![]() (9)
(9)
где ![]() коэффициент передачи,
коэффициент передачи, ![]() постоянная времени срабатывания клапана.
постоянная времени срабатывания клапана.
Учитывая выражения (2) – (9), передаточные функции КЗ и КС байпасной системы, включенных параллельно, имеют вид:
 (10)
(10)
Принимая во внимание возможную идентичность параметров в пределах заданных значений их отклонения:
 (11)
(11)
можно записать передаточную функцию исполнительных устройств КЗ и КС:
![]() (12)
(12)
С учетом выражений (1)–(12) можно записать передаточную функцию БС, а именно:
![]() (13)
(13)
Для измерения и контроля уровня ![]() рабочей среды в резервуаре технического объекта, на его байпасной камере размещен НМПУ на волнах кручения со сложной геометрией акустического тракта, как уже отмечалось ранее. В представленной структурной модели измерительной системы (см. рис. 2) НМПУ включен в цепь обратной связи. Математически звенья могут быть описаны колебательной, запаздывающей и пропорциональной передаточными функциями [3]:
рабочей среды в резервуаре технического объекта, на его байпасной камере размещен НМПУ на волнах кручения со сложной геометрией акустического тракта, как уже отмечалось ранее. В представленной структурной модели измерительной системы (см. рис. 2) НМПУ включен в цепь обратной связи. Математически звенья могут быть описаны колебательной, запаздывающей и пропорциональной передаточными функциями [3]:
![]() (14)
(14)
![]() (15)
(15)
![]() (16)
(16)
где ![]() коэффициент передачи поплавкового элемента НМПУ,
коэффициент передачи поплавкового элемента НМПУ, ![]() постоянная времени байпасной камеры с поплавковым элементом и магнитом,
постоянная времени байпасной камеры с поплавковым элементом и магнитом, ![]() постоянная демпфирования,
постоянная демпфирования, ![]() временной интервал уровня
временной интервал уровня ![]() среды технического объекта,
среды технического объекта, ![]() скорость основной моды ультразвуковой волны кручения,
скорость основной моды ультразвуковой волны кручения, ![]() фазовая скорость продольной ультразвуковой волны в среде звукопровода,
фазовая скорость продольной ультразвуковой волны в среде звукопровода, ![]() коэффициент усиления усилителя считывания НМПУ,
коэффициент усиления усилителя считывания НМПУ, ![]() амплитудные значения акустической волны, индуцированного (считанного) и усиленного в
амплитудные значения акустической волны, индуцированного (считанного) и усиленного в ![]() раз информационного сигнала уровня на аналоговом выходе НМПУ.
раз информационного сигнала уровня на аналоговом выходе НМПУ.
С учетом выражений (14)–(16) запишем передаточную функцию цепи обратной связи исследуемой системы:
![]() (17)
(17)
Зная выражения передаточных функций разомкнутой системы (13) и цепи обратной связи (17), составим уравнение передаточной функции замкнутой системы [3]:
 (18)
(18)
которая имеет общий коэффициент усиления:
![]() (19)
(19)
с сигналом рассогласования ![]() на сигнал записи (управления) [2]:
на сигнал записи (управления) [2]:
![]() (20)
(20)
здесь ![]() амплитуда и длительность сигнала,
амплитуда и длительность сигнала, ![]() число гармоник.
число гармоник.
Получив выражения передаточных функций для разомкнутой (13), замкнутой (18) системы и цепи ее обратной связи (17), проведем исследование эффективности ее работы с использованием НМПУ на волнах кручения со сложной геометрией акустического тракта. Для этого используем частотные и временные критерии теории автоматического управления и регулирования [3].
Выполнив замену ![]() в выражениях (13), (18) передаточных функций разомкнутой и замкнутой байпасной системы технологического объекта, проведем исследование ее амплитудно-частотной характеристики (АЧХ):
в выражениях (13), (18) передаточных функций разомкнутой и замкнутой байпасной системы технологического объекта, проведем исследование ее амплитудно-частотной характеристики (АЧХ):
а) разомкнутая БС:
![]() (21)
(21)
б) замкнутая БС:
 (22)
(22)
здесь

Результаты моделирования АЧХ разомкнутой (рис. 3) и замкнутой (рис. 4) байпасной системы с НМПУ на волнах кручения со сложной геометрией акустического тракта, полученные при значениях ![]()
![]()
![]() показывают, что введение в цепь обратной связи БС НМПУ ведет к уменьшению коэффициента усиления
показывают, что введение в цепь обратной связи БС НМПУ ведет к уменьшению коэффициента усиления ![]() системы, возрастанию плавности регулирования и смещению резонансных свойств в область более высоких частот.
системы, возрастанию плавности регулирования и смещению резонансных свойств в область более высоких частот.
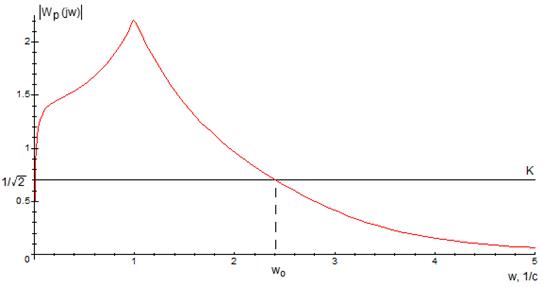
Рисунок 3 – АЧХ разомкнутой БС
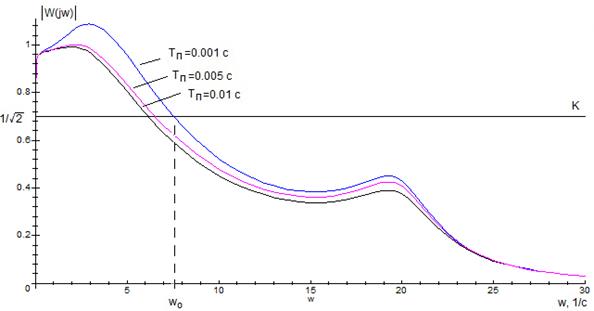
Рисунок 4 – АЧХ замкнутой БС с НМПУ
На диапазоне измерения уровня ![]() АЧХ БС с НМПУ данного типа на частоте среза
АЧХ БС с НМПУ данного типа на частоте среза ![]() не имеет неравномерностей и не подвержена самовозбуждению, т.е. является устойчивой. С ростом постоянной времени
не имеет неравномерностей и не подвержена самовозбуждению, т.е. является устойчивой. С ростом постоянной времени ![]() НМПУ возрастает инерционность БС с некоторым смещением резонансной частоты
НМПУ возрастает инерционность БС с некоторым смещением резонансной частоты ![]() в область более низких частот
в область более низких частот ![]() (см. рис. 4).
(см. рис. 4).
Проведем исследование работы байпасной измерительной системы с НМПУ на волнах кручения со сложной геометрией акустического тракта во временной области [3]. По качеству переходного процесса системы можно установить эффективность ее работы.
Выполним следующие преобразования полученных ранее выражений (21), (22), сделав замену параметра ![]() где
где ![]() период сигнала. В результате имеем следующие выражения переходных функций для каждого звена исследуемой системы:
период сигнала. В результате имеем следующие выражения переходных функций для каждого звена исследуемой системы:
![]() (23)
(23)
![]() (24)
(24)
![]() (25)
(25)
 (26)
(26)
![]() (27)
(27)
 (28)
(28)
![]() (29)
(29)
![]() (30)
(30)
Следовательно, переходные характеристики разомкнутой цепи обратной связи и замкнутой системы описываются следующими уравнениями:
![]() (31)
(31)
![]() (32)
(32)
![]() (33)
(33)
Их анализ показывает отсутствие колебательных процессов на ступенчатое воздействие ![]() со временем успокоения
со временем успокоения ![]() при значениях
при значениях ![]() НМПУ на волнах кручения со сложной геометрией акустического тракта, как показано на рисунке 5. Например, с ростом значений
НМПУ на волнах кручения со сложной геометрией акустического тракта, как показано на рисунке 5. Например, с ростом значений ![]() увеличивается время
увеличивается время ![]() успокоения системы, что является естественным, поскольку возрастает время трансляции УЗВ кручения через среду U-образного звукопровода по мере увеличения уровня
успокоения системы, что является естественным, поскольку возрастает время трансляции УЗВ кручения через среду U-образного звукопровода по мере увеличения уровня ![]() жидкой среды в резервуаре объекта.
жидкой среды в резервуаре объекта.
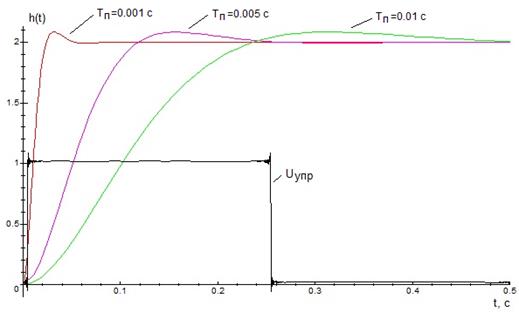
Рисунок 5 – Влияние параметра ![]() на форму передаточной характеристики БС с НМПУ
на форму передаточной характеристики БС с НМПУ
Отсутствие колебаний в системе, которые могут вызвать резонансные явления, доказывает ее устойчивость, позволяя не проводить дополнительные исследования.
Выводы
Таким образом, повышение эффективности работы НМПУ на волнах кручения достигается за счет уменьшения времени переходных процессов в байпасной измерительной системе, а также за счет удвоенного повышения разрешающей способности измерительного прибора при его относительно высокой точности [2, 4]. Это дает основание утверждать о целесообразности использования НМПУ данного типа в байпасных системах измерения и контроля агрессивных жидких сред, а также сред, находящихся под давлением.
Рецензенты:
Султанов Б.В., д.т.н., профессор кафедры «Информационная безопасность систем и технологий» Пензенского государственного университета, г. Пенза.
Сальников И.И., д.т.н., профессор, заведующий кафедрой «Вычислительные машины и системы» Пензенского государственного технологического университета, г. Пенза.
Библиографическая ссылка
Мокроусов Д.А., Демин Е.С., Карпухин Э.В., Демин С.Б. ИССЛЕДОВАНИЕ БАЙПАСНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ С МАГНИТОСТРИКЦИОННЫМ УРОВНЕМЕРОМ МЕТОДОМ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ // Современные проблемы науки и образования. 2014. № 4. ;URL: https://science-education.ru/ru/article/view?id=13765 (дата обращения: 28.07.2026).