



Введение
Построение высокоэнергетических лазерных систем стабильно привлекает внимание разработчиков в различных сферах. Получение сверхвысоких плотностей энергии, применение на расстоянии и высокая точность позиционирования луча открывают лазерным системам многие сферы применения [4].
Общепринятым методом наращивания мощности твердотельных лазерных комплексов является использование многоканальных систем, состоящих из набора технологически унифицированных лазерных излучателей. Наряду с системами с когерентным сложением излучения, возможно построение многоканальной системы из набора импульсных лазерных модулей, в т.ч. твердотельных, работающих последовательно с высокой частотой. Основной особенностью здесь является последовательное сведение каналов лазерных модулей на общую ось при помощи оптического коммутатора. Оптический коммутатор является устройством, позиционирующим элемент оптической коммутации (например, призма) в определенные положения с высокой скоростью. Коммутатор позиционирует призму таким образом, чтобы излучение модуля, проходя через призму, в дальнейшем попадало в одну точку. При повышении частоты коммутации в такой системе наблюдается квазинепрерывный режим излучения на цели.
Наиболее важными достоинствами такой многоканальной лазерной системы, по сравнению с традиционными одноканальными, являются: длительный режим работы, высокая мощность излучения, возможность включения в систему разнородных каналов.
Наряду с достоинствами, применение многоканальных систем обладает недостатками. Главным является необходимость юстировки отдельных модулей для дальнейшего корректного сведения лазерных пучков. Как показывает опыт работ с твердотельными лазерами на неодимовом стекле, разъюстировки в них возникают при изменении климатических условий окружающей среды, главным образом - температуры. Как правило, юстировка отдельных каналов обеспечивается введением клиновых компенсаторов (оптических клиньев). Наличие дополнительных юстировочных устройств вызывает неизбежное затухание излучения в оптических трактах. Таким образом, КПД системы падает вследствие рассеяния части энергии на юстирующих элементах в виде тепла. В процессе работы такой лазерной системы получается серия высокоэнергетических импульсов. Средняя мощность излучения такого режима определяется формулой (1):
 (1)
(1)
где где υ – частота следования импульсов излучения; η – КПД оптического тракта;
Т – длительность режима работы; p(t) – мощность излучения модуля в функции времени.
Из формулы (1) следуют три пути повышения мощности системы: рост мощности излучения отдельного импульса, рост КПД оптического тракта, рост частоты опроса каналов.
Первый вариант сводится к повышению импульсной мощности отдельного лазерного модуля и обладает определенными сложностями. На определенном этапе масштабирование отдельно взятого лазерного модуля становится. Это провоцирует разработки новых методик построения высокомощных лазерных систем.
Второй и третий варианты представляют интерес в части их синергетического объединения. Повысить КПД и увеличить частоту опроса каналов может принципиально новый оптический коммутатор, обладающий, наряду с высоким быстродействием, функционалом автоматической юстировки оптических каналов. Обладая возможностью автоюстировки излучения, коммутатор охватит систему главной обратной связью по положению лазерного пучка и исключит излишние оптические элементы в системе, повысив тем самым КПД.
Цель исследования
Целью является разработка математического алгоритма позиционирования призмы оптического коммутатора многоканальной лазерной системы. На основе полученного закона формируются выводы о предпочтительной кинематике оптического коммутатора.
Материал и методы исследования
Исследования велись на лазерных модулях, представляющих собой твердотельные лазеры на неодимовом стекле с ламповой накачкой с длиной волны излучения λ = 1,06 мкм и длительностью импульса излучения 6 мс.
Определение разъюстировки лазерных модулей велось с помощью отвода части лазерного пучка на диффузный экран и регистрации световых пятен скоростной камерой Fastvideo – 500 с последующим вычислением на основе оптической геометрии. Отвод части лазерного пучка осуществлялся плоскопараллельными светоделительными пластинами из кварцевого стекла КУ ГОСТ 15130-86 с просветлением неотводящей поверхности на длину волны λ = 1,06 мкм для минимизации вторичного пятна.
Возникающая разъюстировка лазерного модуля может быть разложена на вертикальную и горизонтальную составляющие, каждая из которых может быть угловой и/или линейной. Схематичное изображение хода эталонного и разъюстированного луча при различных видах разъюстировки приведено на рисунке 1.
а)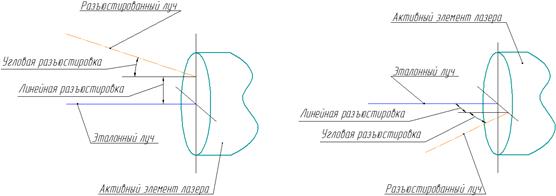 б)
б)
Рис. 1. Схема вертикальной (а) и горизонтальной (б) разъюстировок
Задачей оптического коммутатора, в данном случае, является позиционирование призмы со следующими условиями:
-
оптическая ось излучения модулей
 должна быть перпендикулярна её входной грани для исключения преломления излучения в призме;
должна быть перпендикулярна её входной грани для исключения преломления излучения в призме;
-
оптическая ось отраженного призмой излучения
 должна проходить через целевую точку
должна проходить через целевую точку  .
.
Положения призмы оптического коммутатора при эталонном и разъюстированных лучах схематично изображены на рисунке 2.
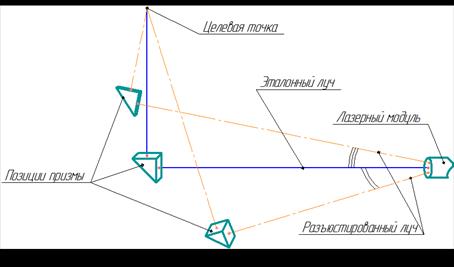
Рис. 2. Положения призмы коммутатора
Примем эталонное положение призмы за начало координат. Зададим ось излучения модуля ![]() как прямую пролегающую в пространстве, описанную системой уравнений в параметрическом виде (2):
как прямую пролегающую в пространстве, описанную системой уравнений в параметрическом виде (2):
 (2)
(2)
где x, y, z – координаты точки прямой в декартовых координатах; LPM – расстояние от призмы до лазерного модуля; LН – линейная горизонтальная разъюстировка; AH – угловая горизонтальная разъюстировка; LV – линейная вертикальная разъюстировка; AV – угловая вертикальная разъюстировка; t – параметр, имеющий действительное значение.
Зададим плоскость I, перпендикулярную оси излучения модуля и проходящую через целевую точку в виде уравнения (3):
![]() (3)
(3)
где x, y, z – координаты точки плоскости в декартовых координатах; LPТ – расстояние от призмы целевой точки.
Точку пересечения оси излучения модуля с плоскостью, описанной уравнением (3) получим посредством объединения (2) и (3) в единую систему уравнений. Параметр t, характерный для точки пересечения P, определяется уравнением (4):
 . (4)
. (4)
Параметр t, найденный при заданных отклонениях LН, AH, LV и AV, будет определять точку P(xр,yр,zр) положения призмы в 3-мерном пространстве и координаты позиционирующих степеней свободы манипулятора оптического коммутатора. В среде MatLab была промоделирована гипотетическая ситуация, когда вертикальная угловая разъюстировка модуля изменялась от 5° до -45°, а горизонтальная от 60° до -60°. Расстояние между модулем и призмой составляло 400 мм, между призмой и целевой точкой – 300 мм. Для множества положений разъюстированного луча было построено множество положений призмы в пространстве. Полученный фрагмент рабочего пространства манипулятор оптического коммутатора приведен на рисунке 3.
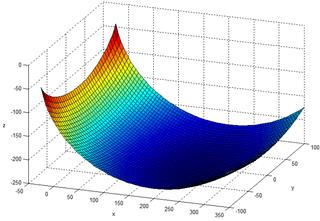
Рис. 3. Фрагмент рабочего пространства манипулятора коммутатора
Полученный фрагмент является элементом сферической поверхности с большим кругом, образованным целевой точкой, точкой эталонного положения призмы и точкой выхода луча из модуля. Координаты множества точек, определяемых системой уравнений (2) являются координатами переносных степеней подвижности манипулятора по осям X, Y и Z.
Ориентирующие степени подвижности оптического коммутатора позволят установить призму в такое положение, чтобы ось излучению модуля была перпендикулярна входной плоскости призмы ![]() . Кроме того должно выполняться условия пролегания оси отраженного излучения через целевую точку
. Кроме того должно выполняться условия пролегания оси отраженного излучения через целевую точку ![]() . Заданная позиция призмы достигается коммутатором в два этапа:
. Заданная позиция призмы достигается коммутатором в два этапа:
- поворот призмы вокруг вектора
 на такой угол
на такой угол  , чтобы нормаль выходной грани совпала с осью ;
, чтобы нормаль выходной грани совпала с осью ; - поворот призмы вкруг нормали выходной грани на такой угол
 , чтобы входная грань стала перпендикулярна оси излучения модуля .
, чтобы входная грань стала перпендикулярна оси излучения модуля .
Схема ориентирующих перемещений призмы коммутатора приведена на рисунке 4.
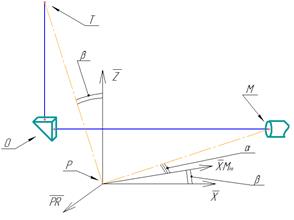
Рис. 4. Схема перемещения по ориентирующим степеням подвижности
Результаты исследования
Вектор оси ![]() определяется вычитанием координат точки P из координат точки Т и имеет следующие координаты
определяется вычитанием координат точки P из координат точки Т и имеет следующие координаты ![]() .
.
Вектор ![]() , вокруг которого осуществляется вращение призмы на первом этапе, является векторным произведением вектора оси
, вокруг которого осуществляется вращение призмы на первом этапе, является векторным произведением вектора оси ![]() и орта оси
и орта оси ![]() и имеет следующие координаты
и имеет следующие координаты ![]() .
.
Угол поворота ![]() на первом этапе является углом между вектором оси
на первом этапе является углом между вектором оси ![]() и ортом оси
и ортом оси ![]() и определяется по формуле (5):
и определяется по формуле (5):
 . (5)
. (5)
Расчет движения звеньев манипулятора для поворота призмы на первом этапе может вестись на основе матрицы поворота вокруг произвольной оси [3]. Здесь осью является вектор ![]() , углом является
, углом является![]() . Для данного случая матрица поворота
. Для данного случая матрица поворота ![]() примет вид (6):
примет вид (6):
 . (6)
. (6)
Перемещение манипулятора при наклоне призмы описывается матрицей поворота (6) и сводится к разворотe вокруг осей Х и У.
Основой для второго этапа является нахождение угла ![]() между вектором
между вектором ![]() и вектором, полученным при повороте орта оси
и вектором, полученным при повороте орта оси ![]() на угол
на угол ![]() вокруг
вокруг ![]() . Таким образом, расчеты перемещений на втором этапе имеют в своей основе математический аппарат первого этапа и сводятся к формуле, определяющей поворот призмы на угол собственного вращения (7):
. Таким образом, расчеты перемещений на втором этапе имеют в своей основе математический аппарат первого этапа и сводятся к формуле, определяющей поворот призмы на угол собственного вращения (7):
 . (7)
. (7)
Предел перемещения по ориентирующей степень подвижности собственного вращения должен превышать центральный угол сектора, в котором расположен набор лазерных модулей вокруг коммутатора. Для большей универсальности манипулятор должен быть полноповоротным по этой степени подвижности.
Учитывая требования по максимизации быстродействия и наличию 6 степеней подвижности, адекватным решением будет построение оптического коммутатора на базе привода с параллельной кинематикой – гексапода. Данный манипулятор обладает 6 независимыми степенями свободы и находит применения в измерительных, станочных и высокоточных позиционирующих системах [1]. Гексапод обладает высоким быстродействием, ввиду малой массы рабочего органа, повышенной жесткостью, и высокой унификацией узлов системы [5].Однако гексапод характеризуется высокой степенью сложности задания перемещений, свойственной параллельным механизмам [2]
Выводы
-
Оптический коммутатор должен обладать 6 степенями подвижности. Построение оптического коммутатора предпочтительно на базе манипулятора типа гексапод.
-
Вследствие большого предела перемещений по углу собственного вращения, данная степень подвижности гексапода дублируется отдельным электроприводом вращения.
Рецензенты:
Гоц А.Н., д.т.н., профессор кафедры тепловых двигателей и энергетических установок Владимирского государственного университета, г. Владимир.
Кульчицкий А.Р., д.т.н., доцент, главный специалист ООО «Завод инновационных продуктов «Концерн тракторные заводы», г. Владимир.
Библиографическая ссылка
Потанин Ю.С. МАТЕМАТИЧЕСКИЙ АЛГОРИТМ РАБОТЫ ОПТИЧЕСКОГО КОММУТАТОРА МНОГОКАНАЛЬНЫХ ЛАЗЕРНЫХ СИСТЕМ // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/ru/article/view?id=13641 (дата обращения: 27.06.2026).