



Введение
Привод исполнительных органов является важным элементом в структуре дозаторных систем, влияющий на их динамические характеристики.
В таких системах широко применяются электромеханические приводы на основе кривошипно-ползунных, шнековых, кулачковых и других механизмов [3].
В частности, применение кулачкового механизма позволяет сформировать закон движения исполнительного органа, обеспечив плавность работы, фиксированное время холостого и рабочего ходов, что существенно влияет на качество и технологичность процесса дозирования.
При этом синтез конструкторско-технологических параметров дозаторной системы, удовлетворяющих заданным требованиям, является важной и актуальной задачей.
Целью данной работы является исследование динамики и оценка ее влияния на характеристики дозаторной системы с кулачковым приводом.
Материалы и методы исследования
Нагнетание дозируемой жидкости на рабочем ходу и ее всасывание из бака на холостом ходу происходит с помощью плунжера (толкателя), контактирующего с кулачком (рис. 1), профиль которого обеспечивает заданный закон возвратно-поступательного движения исполнительного органа. Кулачок приводится во вращение электродвигателем.
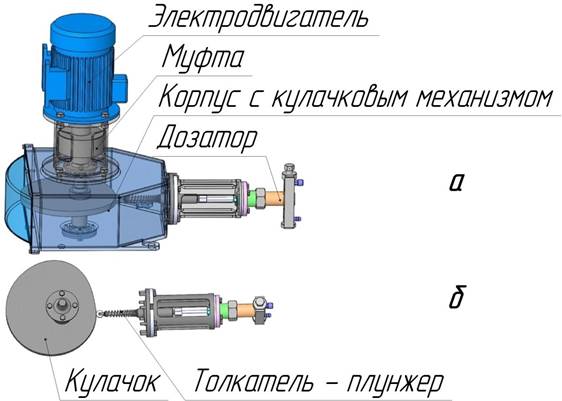
Рис. 1. Дозаторная система с кулачковым приводом
а – общий вид; б – кулачковый механизм
Моделирование динамики системы дозирования (рис. 1) осуществляется на основе структурно-функциональной схемы [6], фрагмент которой представлен на рис. 2.
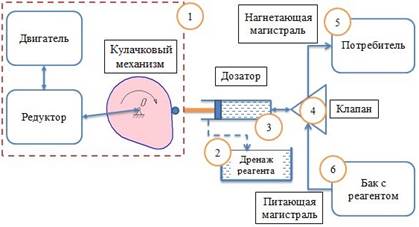
Рис. 2. Структурно-функциональная схема дозаторной системы с кулачковым механизмом
Соответствующая расчетная схема с основными параметрами изображена на рис. 3.
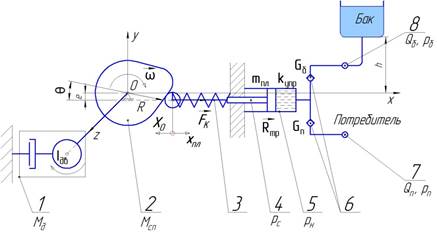
Рис. 3. Расчетная схема дозаторной системы с кулачковым приводом
Здесь и далее приняты следующие обозначения: QП, QБ – соответственно расход жидкости поступающей на потребитель и из бака, м3/с; pН, pП, pБ – соответствующие давления в напорной камере, на потребителе и в баке, МПа; xПЛ – перемещение плунжера, м; ![]() – скорость плунжера, м/с;
– скорость плунжера, м/с; ![]() – угол поворота кулачка, рад;
– угол поворота кулачка, рад; ![]() – угловая скорость кулачка, рад/с; MД, MСП – соответственно движущий момент электродвигателя и момент сопротивления на кулачке, Н·м; FК – осевое усилие со стороны кулачка на толкатель (плунжер), Н; h – высота столба жидкости в баке с реагентом, м.
– угловая скорость кулачка, рад/с; MД, MСП – соответственно движущий момент электродвигателя и момент сопротивления на кулачке, Н·м; FК – осевое усилие со стороны кулачка на толкатель (плунжер), Н; h – высота столба жидкости в баке с реагентом, м.
Математическая модель динамики дозатора формируется при следующих допущениях: жидкость мало сжимаема; материал стенок цилиндра дозатора податлив; потери в камере дозатора равны нулю; давления на потребителе и в баке, постоянны.
Уравнения, описывающие работу дозаторной системы в соответствии с расчетной схемой рис. 3 при учете динамической взаимосвязи всех её элементов [1], представлены соотношениями (1):
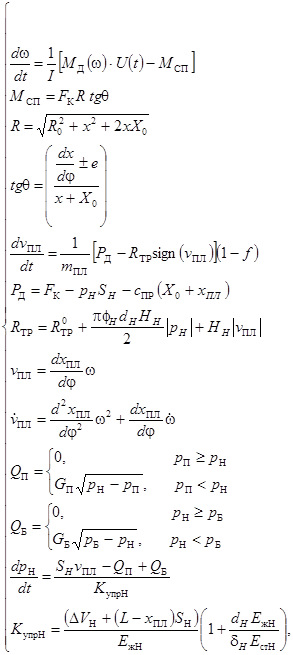 (1)
(1)
где ![]() – приведенный к кулачковому валу момент инерции двигателя, редуктора (при его наличии) и кулачка, кг·м2; i – передаточное число редуктора; U(t) – функция управления (1 – включено, 0 - выключено); R, R0 - текущий и начальный радиус кулачка, м; X0 – положение толкателя наиболее близкое к центру вращения, м; e - эксцентриситет кулачка, м; q – угол давления [4, 5], рад; SН - площадь сечения цилиндра, м2; dН, d¢Н, dН – диаметры цилиндра, плунжера и толщина стенки цилиндра, м;
– приведенный к кулачковому валу момент инерции двигателя, редуктора (при его наличии) и кулачка, кг·м2; i – передаточное число редуктора; U(t) – функция управления (1 – включено, 0 - выключено); R, R0 - текущий и начальный радиус кулачка, м; X0 – положение толкателя наиболее близкое к центру вращения, м; e - эксцентриситет кулачка, м; q – угол давления [4, 5], рад; SН - площадь сечения цилиндра, м2; dН, d¢Н, dН – диаметры цилиндра, плунжера и толщина стенки цилиндра, м; ![]() – мертвый объем полости дозатора, м3; L – ход плунжера, м; EжН, EстН – модули упругости жидкости и материала стенки цилиндра, МПа; KупрН – коэффициент упругости жидкости и материала стенки цилиндра дозатора, м3/МПа; mПЛ – масса плунжера, кг; PД – движущая сила на плунжере, Н;
– мертвый объем полости дозатора, м3; L – ход плунжера, м; EжН, EстН – модули упругости жидкости и материала стенки цилиндра, МПа; KупрН – коэффициент упругости жидкости и материала стенки цилиндра дозатора, м3/МПа; mПЛ – масса плунжера, кг; PД – движущая сила на плунжере, Н; ![]() – сила трения в манжетных уплотнениях при отсутствии давления, Н; RТР - суммарная сила трения, Н; fН – коэффициент трения в манжетах; сПР – жесткость пружины, Н/м; HН – высота манжетного уплотнения в цилиндре, м; GП, GБ – проводимость клапанов [2], м4·с-1·Н-0,5.
– сила трения в манжетных уплотнениях при отсутствии давления, Н; RТР - суммарная сила трения, Н; fН – коэффициент трения в манжетах; сПР – жесткость пружины, Н/м; HН – высота манжетного уплотнения в цилиндре, м; GП, GБ – проводимость клапанов [2], м4·с-1·Н-0,5.
Соотношения (1) характеризуют дозаторную систему как единую взаимосвязанную электрогидромеханическую структуру.
Выразив из (1) значение осевой силы FК и введя обозначения ![]() ,
, ![]() ,
, ![]() , уравнения динамики при заданном законе движения исполнительного органа
, уравнения динамики при заданном законе движения исполнительного органа ![]() принимают вид:
принимают вид:
 (2)
(2)
где: ![]() ;
; ![]() ;
;
![]() .
.
По заданным начальным условиям y1,0, y2,0, y3,0 определяются S(y1,0) и характеристики алгебраических соотношений системы (2). Затем интегрируются остальные дифференциальные уравнения, формируя последующие приближение и т.д.
Математическое моделирование динамики дозатора осуществляется в системе Matlab с помощью разработанного программного комплекса на основе метода Рунге – Кутта 4 и 5 порядков по схеме Dormand and Prince (автоматический выбор шага) [7].
В процессе моделирования при заданном законе движения плунжера с учетом динамической характеристики двигателя определяются усилия и момент сопротивления в кулачковом механизме, давление жидкости в камере дозатора и соответственно расходы жидкости в соответствии с условиями функционирования клапанов.
Результаты исследования и их обсуждение
Результаты моделирования представляются в виде таблиц значений и графических диаграмм параметров и характеристик дозаторной системы.
Рис. 4, 5 иллюстрируют результаты одного из расчетов при следующих основных исходных данных: давление в магистрали потребителя 40 МПа (400 атм.), ход поршня 60 мм, кулачок центральный с начальным радиусом 0,12 м, закон движения толкателя – полиномиальный девятой степени [5].
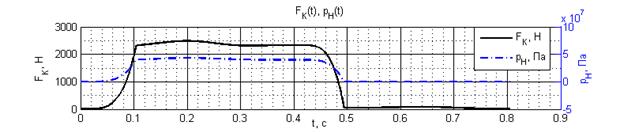
Рис. 4. Графики осевого усилия со стороны кулачка на толкатель и давления дозируемой жидкости в камере дозатора
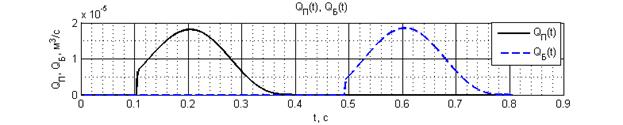
Рис. 5. График расходов клапанов дозатора
Анализируя полученные данные рис. 4, 5 видно, что принятый закон движения исполнительного органа, реализуемый формой профиля кулачка, обеспечивает плавный рост усилия на плунжере и давления в камере дозатора. Вследствие этого осуществляется безударное открытие клапана при дозировании на рабочем ходу и соответствующее открытие клапана на холостом ходу при всасывании дозируемой жидкости.
Заключение
Предложенная математическая модель и программный комплекс позволяют осуществить направленное исследование динамики дозаторных систем с кулачковым приводом. Тем самым появляется возможность выбора оптимальных конструктивно-технологических параметров, удовлетворяющих требуемым критериям качества функционирования дозаторных систем.
Рецензенты:
Иванов В.А., д.т.н., профессор, зав. кафедрой МСИ Пермский национальный исследовательский политехнический университет, г.Пермь.
Матыгуллина Е.В., д.т.н., профессор кафедры МТиКМ Пермский национальный исследовательский политехнический университет, г.Пермь.
Библиографическая ссылка
Ханов А.М., Кобитянский А.Е., Шафранов А.В., Петров Д.А., Кузнецов М.В. ДИНАМИКА ДОЗАТОРНОЙ СИСТЕМЫ С КУЛАЧКОВЫМ ПРИВОДОМ // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/ru/article/view?id=12768 (дата обращения: 29.06.2026).