


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
SEMIATUMATIC METHOD REGISTRATION LOCATION OF EXPERIMENTAL ANYMALS IN NON RESTRICTED CONDITIONS

Важнейшим параметром в экспериментах, в которых участвуют животные в условиях свободного поведения, являются данные о местоположении и их фактической деятельности в каждый момент времени.
Существует несколько технических систем автоматической регистрации траектории движения животных. Наиболее распространенной является система, действующая на основе оптопар, работающих в инфракрасном диапазоне [7], в которой положение животного определяется с довольно низкой точностью по квадратам, образованным пересечением лучей оптопар. Поскольку эта технология отработана и не было выявлено влияния инфракрасной подсветки на поведение животных, она стала фактически стандартом.
Другая система автоматического видеотрекинга - с использованием персонального компьютера, видеокамеры и пакета специальных программ для анализа видеопотока как в реальном масштабе времени, так и по анализу записанного видеоролика, например система ANY-maze (http://www.anymaze.com/) [1]. Или программа SEE (Software for th Exploration of Exploration, http://www.tau.ac.il/~ilan99/see/help/ ) [3; 6]. В работе [7] достоверность работы программы SEE сравнивается со стандартным методом регистрации положения с применением оптопар, работающих в инфракрасном диапазоне, для оценки тревожности в эксперименте «открытое поле»[ 5]. Имеется также программная разработка EthoVision фирмы Noldus, http://www.noldus.com/, особенностью которой является наличие специального графического языка, позволяющего оптимизировать процесс анализа видеоинформаци [3].
Работа всех вышеупомянутых программных комплексов основана на анализе видеосигнала, поступающего с видеокамеры. Основным преимуществом оказывается возможность регистрации перемещения животных на произвольном поле наблюдения и отсутствие какого-либо воздействия на них перед экспериментом. Есть и отрицательные стороны. Например, для системы ANY-Maze, имеется ряд ограничений. Так при определении положения животного используется небольшое число - 11-13 состояний поведения, при которых достоверно определяется только положение центра масс животного. Определение же состояний поведения (стоек, груммингов и т.д.) - распознаётся программой не всегда достоверно. Предполагается, что животные могут находиться только в одном из состояний, а это означает, что в автоматическом режиме невозможно определить смешанные элементы поведения и переходы одного состояние в другое, минуя какие-либо стандартные промежуточные (например, переход из грумминга в стойку). К тому же невозможно дифференцировать нетипичные проявления поведения животных в опытах (обгрызание элементов установки, копание и т.п.). Существующие методики не позволяют оценивать пространственное положение частей тела экспериментальных животных, в частности положение их головы, что характеризует направление их внимания. Для определения положения частей тела животных часто используется подход, при котором производится последовательное вычисление центра масс, точки прикрепления хвоста животного и вычисление положение носа, на основе активных моделей формы [1].
Современные системы наблюдения за поведением животного являются многомодульными программами, которые нацелены не только на регистрацию трека перемещения животного, но и на оценку параметров перемещения отдельных частей тела животного. Например, в системе SEE производится разбивка трека на сегменты с разной скоростью движения, что позволяет определить особо предпочитаемые места в экспериментальной установке, а также выявить ряд особенностей поведения при совершении животным исследовательских экскурсий по установке [6].
Аналогичный принцип используется и в программе EthoVision. В этой программе имеется возможность гибкой настройки распознавания элементов поведения, с использованием графического языка для описания процесса анализа и сбора экспериментальных данных GEPS (Graphical EthoPlayer Script). При этом исследователь сам может задать режим запросов на отбор и группировку данных [3].
Общим недостатком всех приведенных выше программ является различный формат получаемых данных с учётом разных режимов наблюдения за животным.
Для преодоления недостатков, связанных с автоматическим видеотрекингом, нами разработана полуавтоматическая методика, позволяющая осуществлять наблюдение, регистрацию и запись трека перемещения животных и регистрацию нетипичных элементов их поведения, которые появляются в процессе самого эксперимента.
В предлагаемой нами методике используется: персональный компьютер с установленным на нём операционной системой Ubuntu 11.04 (Natty Narval), c ядром Linux (2.6.35-32-generic), видеокамера Logitech Web Cam C510, свободно распространяемая программа (GNU License) Cheese 2.32.0 и вновь разработанная программа SLR7 (свидетельство о государственной регистрации № 2012618270). Общий вид установки показан на рис. 1.

Рис. 1. Общий вид установки.
Видеокамера жёстко закреплена на специально спроектированном штативе непосредственно над экспериментальной установкой. Формируемое изображение выводится на экран персонального компьютера с диагональю экрана 15.6''. При этом диагональ видеоокна равна около 27 см, что позволяет достичь регистрации минимального разрешения в 3 мм.
Экспериментальная установка представляет собой модифицированный вариант клетки [2], в которой находятся два отсека, разделённые перегородкой, в которой имеется дверца. Один отсек - стартовый, с опилками, из клетки вивария, в которой содержались экспериментальные животные. Во втором отсеке, в противоположной от дверцы стенке располагается поилка. Пол этого отсека оснащён пластинами, на которые можно подавать электрический ток заданной величины. Цвет двух (передней и задней) стенок можно менять с белого на чёрный. Белый цвет стенок применяется при положительном подкреплении (удовлетворении питьевой мотивации крыс). Чёрный цвет стенок применяется при отрицательном подкреплении (электрокожном раздражении). При этом в зависимости от задачи экспериментаторов элементов пусковой мотивации можно наблюдать питьевое и оборонительное поведение животных.
Для анализа экспериментальных данных пол установки разделяется на несколько зон (рис. 2). Координаты зон вводятся в программу перед каждым экспериментом, а также могут загружаться из отдельного файла. Трекинг осуществляется указателем манипулятора мышь, поверх окна видеовывода.
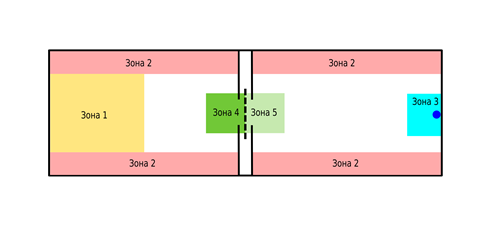
Рис. 2 Задание зон на полу установки.
Указателем мыши следуя за животным, можно как задать автоматическую запись события (например, попадание в зону 5 или выход из зоны 5), так и регистрировать элементы поведения путём нажатия на соответствующие кнопки клавиатуры. Этим способом удобно регистрировать состояния животного, не связанные с перемещением, например начало грумминга — конец грумминга.
Для условий данного эксперимента необходимо было отслеживать перемещение животного в 5 зонах, каждая из которых связана с предполагаемым мотивом действия животных. Так, нахождение крысы в зоне 4 - связывается с элементами предвидения подкрепления, при закрытой дверце между отсеками. Нахождение крысы в зоне 3 — связано с удовлетворением питьевой потребности, в зоне 1 — нахождение в безопасной зоне, в зоне 2 - с элементами исследовательской активности.
Данные о перемещении животного записываются в файл типа .csv с периодом 0.1 с. . Программой POINTS (свидетельство государственной регистрации № 2012618268) можно визуализировать форму трека перемещения животного. Примеры визуализации (для необученной и обученной крысы показаны на рисунке 2. Элементы поведения обозначены условными символами, значение которых представлено в нижней части рисунка.
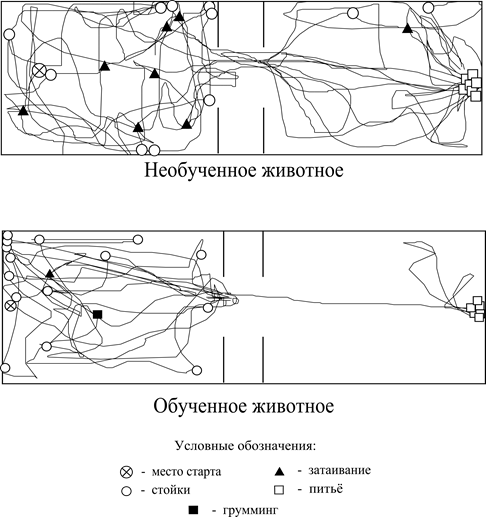
Рис. 2. Примеры визуализации треков перемещения и элементов поведения животных
При объективных недостатках, связанных с ручной регистрацией перемещения животных (главным из которых является субъективность экспериментатора), имеется целый ряд достоинств описанного выше метода. Это - возможность гибкой перестройки работы под любую экспериментальную установку; работа при низком уровне освещённости и наличии неравномерности окраски фона (подстилающей поверхности); быстрое обучение персонала, а также возможность оперативно регистрировать новые элементы поведения животных (например, копание или обгрызание определённых элементов экспериментальной установки), предвидеть появление которых заранее невозможно.
Представленный метод можно использовать совместно с другими существующими методами регистрации, например с использованием методов прямой регистрации перемещения животных (микропередатчиками, закрепленными или имплантированными в животных), а также с существующими программными комплексами видеотрекинга.
Рецензенты:
Сюзев Владимир Васильевич, доктор технических наук, профессор, заведующий кафедрой ИУ-6 (Компьютерные системы и сети), Московский государственный университет им. Н.Э. Баумана, г. Москва.
Умрюхин Павел Евгеньевич, доктор медицинских наук, профессор Кафедра нормальной физиологии, Первый московский медицинский университет им. И.М. Сеченова, г. Москва.
Библиографическая ссылка
Чубаров И.Ю. ПОЛУАВТОМАТИЧЕСКАЯ МЕТОДИКА РЕГИСТРАЦИИ ПРОСТРАНСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ В УСЛОВИЯХ СВОБОДНОГО ПОВЕДЕНИЯ // Современные проблемы науки и образования. 2013. № 3. ;URL: https://science-education.ru/en/article/view?id=9372 (дата обращения: 01.07.2026).