


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
NONCONTACT SPEED SENSOR OF ROTORS SWINGING MOVEMENT AND FIELDS OF THE APPLICATION

Разработанным, запатентованным и изготовленным в НМСУ «Горный» электромеханическим буровым снарядом на грузонесущем кабеле достигнуты наивысшие мировые результаты при бурении ледника в Антарктиде на станции Восток – 05 февраля 2012 года на глубине 3769,3 метра скважины 5Г было вскрыто подледниковое озеро Восток. При бурении слабосвязанных пород и интервалов с кавернами подобные выше указанному снаряды становятся неработоспособными из-за потери сцепления распорного устройства со стенками скважины и невозможности компенсировать реактивный момент, возникающий при работе буровой коронки на забое. В отличие от традиционных, разрабатываемые динамически уравновешенные буровые снаряды (ДУБС) не требуют применения редуктора и распорных устройств и могут применяться для очистки призабойных зон нефтяных скважин, взятия донных проб рек, озер, морей и океанов, многорейсового бурения в шельфовых зонах с бортов неспециализированных судов, что является актуальным, особенно для взятия донных проб озера Восток в Антарктиде после его вскрытия (рис. 1). ДУБС представляет собой двухмассовую колебательную электромеханическую систему (ЭМС) с электроприводом возвратно-вращательного движения [1,2,4,6,7]. Статорная часть 1,2,5 погружного вентильного маслозаполненного электродвигателя соединена с роторной частью 4,7,8,9, упругим элементом 6 – пружиной кручения. При постановке снаряда на забой и подаче на статорные обмотки электродвигателя напряжения, формирующего знакопеременный электромагнитный момент, статорная и роторная части совершают возвратно-вращательные движения в противоположных направлениях. Давление на забой и момент сопротивления на буровой коронке определяются общей массой снаряда. Разработанная система управления электроприводом возвратно-вращательного движения позволяет получать авторезонансные колебания ЭМС ДУБС, инвариантные к изменениям и нелинейностям динамических параметров системы [3,5]. При работе на резонансной частоте электромеханической системы амплитуды колебаний имеют максимальные значения, а сумма моментов вращения, действующая на эти части, равна нолю, т.е. буровой снаряд является динамически уравновешенным. Авторезонансные колебания электропривода возвратно-вращательного движения для динамически уравновешенного бурового снаряда обеспечиваются путём реверсирования электромагнитного момента электродвигателя на каждом полупериоде синфазно со скоростью в точках перехода её через нулевое значение. Известно, что резонансные режимы в разомкнутых системах на практике нереализуемы.
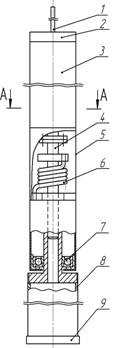
Рис. 1. Конструктивная схема ДУБС
Устройством для реализации способа управления резонансными колебаниями мог бы быть резольвер, которому необходим источник питания высокой частоты для роторной обмотки (образуемое в ней первичное возбуждение является опорным сигналом), а также необходим АЦП для обработки статорных Sin и Cos выходных сигналов и выделения полезного сигнала угла поворота. Всё это усложняет конструкцию и увеличивает стоимость и снижает защищённость. Поэтому решалась задача создания своего датчика, отвечающего всем требованиям и лишенного указанных недостатков. В результате разработан и изготовлен в двух вариантах (рис.2 а, б) простейший датчик скорости ВВД, служащий для реализации замкнутой системы управления электроприводом возвратно-вращательного движения с обеспечением незатухающих резонансных автоколебаний [1,3,5,6].
Датчик содержит цилиндрический корпус 1 с крышкой 4, установленные в корпусе 1 магнитопровод 2 с двумя кольцевыми полуобмотками с полюсным делением равным π и явнополюсный ротор с постоянными магнитами с одной парой полюсов 3, подшипник скольжения 5. Зазор между статором и ротором 6 составляет приблизительно 1 мм. Явнополюсный ротор 3 датчика установлен на валу электродвигателя с совмещением продольных осей симметрий роторов датчика и электродвигателя (рис. 2, а).
а)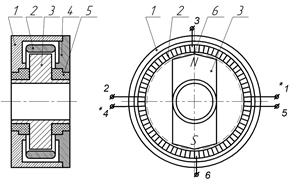 б)
б) 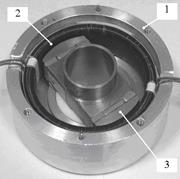
Рис. 2. а) Бесконтактный датчик скорости ВВД (конструктивная схема); б) датчик скорости ВВД (крышка снята): 1 – корпус; 2 – магнитопровод с кольцевой обмоткой; 3 – ротор с постоянными магнитами марки К-15-15-03N
Бесконтактный датчик имеет 6 выведенных концов: “1-2-3” и”4-5-6”. Такое конструктивное исполнение позволяет получать различные напряжения на выходе в зависимости от схемы их соединения. При подключении обмотки по схеме, показанной на рис. 3, I), а) формируется напряжение равное напряжению каждой из полуобмоток, при этом повышая надежность. При реализации схемы рис. 3, I), б) получается удвоенное напряжение на выходе. При подключении по схеме рис. 3, I), с) получаются гальванически развязанные обмотки.
I) 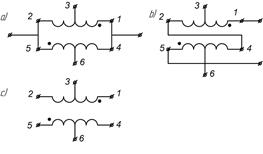 II)
II) 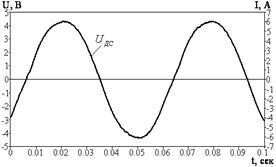
Рис. 3. I) Схемы подключения обмоток бесконтактного датчика скорости вращения и положения ротора; II) Осциллограмма напряжения от бесконтактного датчика скорости ВВД
Ротор датчика скорости установлен на валу электродвигателя с совмещением продольных осей симметрий роторов датчика и электродвигателя. Размах колебаний ротора электропривода возвратно-вращательного движения, при котором может быть использован бесконтактный датчик скорости ВВД, достигает 180 0.
Экспериментальный датчик скорости ВВД имеет следующие параметры: внутренний диаметр кольцевого магнитопровода d=70мм, внешний D=80, ширина l=15мм, количество витков на одной полуобмотке – 300, толщина ротора с постоянными магнитами l=15мм, ширина полюса hδ=36мм, принятое среднее значение магнитной индукции в зазоре Вср=0,5Тл. Напряжение на концах полуобмотки датчика скорости ВВД определится формулой ![]() ,
,
где v – средняя линейная скорость движения ротора датчика; В – магнитная индукция постоянного магнита ротора; l – активная длина проводника, ![]() – число витков в магнитном поле ротора; N – число витков в полуобмотке, αδ – коэффициент полюсного перекрытия. Коэффициент полюсного перекрытия:
– число витков в магнитном поле ротора; N – число витков в полуобмотке, αδ – коэффициент полюсного перекрытия. Коэффициент полюсного перекрытия: ![]() ,
,
где hδ – ширина магнитного полюса, τ – полюсное деление.
Полюсное деление датчика![]() ,
, ![]() .
.
Скорость движения ротора изменяется по синусоидальному закону, напряжение на выводах полуобмоток датчика тоже будет иметь синусоидальный характер. Максимальный размах колебаний составляет 180 º, расчётная частота колебаний ротора принята f=15 Гц, соответственно время одного полупериода равно ![]() . Тогда средняя скорость за полпериода будет равна:
. Тогда средняя скорость за полпериода будет равна: ![]() .
.
Среднее напряжение на одной полуобмотке датчика за полпериода при известной средней скорости: ![]() Амплитудное значение напряжения
Амплитудное значение напряжения ![]() .
.
На рис. 3, II) представлена осциллограмма напряжения UДС от бесконтактного датчика скорости ВВД, амплитудное значение которого равно UДС≈ 4 В.
а)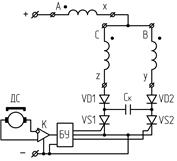 б)
б) 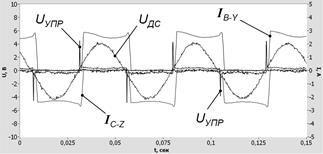
Рис. 4. а) Схема управления авторезонансными колебаниями электропривода ВВД:
ДС – датчик скорости, К – компаратор, БУ – блок управления, VS1 и VS2 – силовые тиристоры, VD1 и VD2 – силовые диоды, Ск – коммутирующая емкость, “A-X”– обмотка возбуждения, “C-Z”, “B-Y” – рабочие обмотки;
б) осциллограмма токов рабочих обмоток “C-Z” и “B-Y”, напряжения датчика скорости ВВД UДС, управляющих импульсов на тиристорах в авторезонансном режиме на частоте 20,5 Гц
Замкнутая система управления авторезонансным электроприводом ВВД (рис.4, а) обладает следующими особенностями [3,4,5,6]: при подаче напряжения от датчика скорости ВВД UДС на вход компаратора К при значении UДС≈0 на выходе компаратора формируется единичный скачок напряжения, под действием которого блок управления БУ выдаёт соответствующий управляющий импульс на силовые тиристоры VS1 или VS2 (рис.4,б). При этом ток в рабочих обмотках электродвигателя “C-Z” и “B-Y” формирует синфазный со скоростью электромагнитный момент, обеспечивая устойчивые резонансные соотношения в ЭМС при изменении технологических нагрузок и динамических параметров системы.
Рецензенты:
Шклярский Я. Э., доктор технических наук, профессор кафедры "Электротехника, электроэнергетика, электромеханика", Национальный минерально-сырьевой университет "Горный", г. Санкт-Петербург.
Дмитриев Б. Ф., доктор технических наук, профессор кафедры электротехники и электрооборудования судов, ФГБОУ ВПО Санкт-Петербургский государственный морской технический университет, г. Санкт - Петербург.
Библиографическая ссылка
Загривный Э.А., Губарь Н.С., Поддубный Д.А. БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ ВОЗВРАТНО-ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ РОТОРА И ОБЛАСТИ ЕГО ПРИМЕНЕНИЯ // Современные проблемы науки и образования. 2013. № 3. ;URL: https://science-education.ru/en/article/view?id=9159 (дата обращения: 09.07.2026).