


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
DEVELOPMENT OF PARAMETRICAL MODEL MANAGEMENTS OF SANITARY LANDFILL MUNICIPAL SOLID WASTE

Введение
Полигон ТБО – сложная биохимическая система, в которой протекают взаимо-связанные физические, механические, химические и биологические процессы [3]. Создание системы, предназначенной для управления полигоном ТБО как биореактором с несколькими регулируемыми величинами, является актуальной задачей. Распределенная одноконтурная модель управления полигоном ТБО была рассмотрена в работе [4] (рисунок 1).
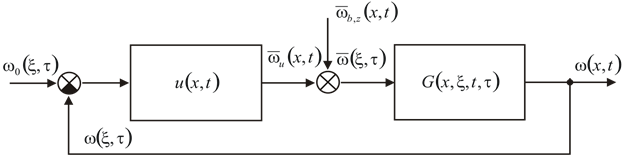
Рисунок 1 – Обобщенная структурная схема распределенного управления полигоном ТБО: ![]() – заданное состояние влажности в массиве отходов;
– заданное состояние влажности в массиве отходов; ![]() – отклонение распределенного выхода от заданного состояния;
– отклонение распределенного выхода от заданного состояния; ![]() – распределенное управляющее воздействие;
– распределенное управляющее воздействие; ![]() – внешние возмущения;
– внешние возмущения; ![]() – стандартизирующая функция
– стандартизирующая функция
Целью настоящего исследования являлось изучение влияния физико-химических параметров полигона ТБО на образующиеся эмиссионные продукты (фильтрат и биогаз) и разработка многоконтурной системы управления. В многомерных системах управления, в отличие от одномерных, возмущение одного из контуров может происходить за счет изменений в других контурах.
Материал и методы исследования
При обосновании методов и алгоритмов управления системами утилизации отходов использовались методы системного анализа, общей теории систем, теории автоматического регулирования, дифференциального и интегрального исчисления, методов математического и имитационного моделирования, статистики и теории вероятностей, механики сплошных сред. Методы исследования включали анализ, сравнение, обобщение, аналогию и статистическую обработку данных. Объектом исследований являлись материально-энергетические и информационные потоки, протекающие на объектах утилизации отходов, рассматриваемые как объекты моделирования и управления. Материалом исследования являлись твёрдые бытовые отходы.
Результаты исследования и их обсуждение
1. Анализ основных факторов, описывающих динамику объекта.
В зависимости от внешних факторов (возраст полигона, физико-химические процессы) состояние объекта характеризуется установившимся или неустановившимся режимами, от которых изменяются требования к управлению объектом [4]. В качестве доступных управляемых параметров мониторинга процессов, протекающих в массиве ТБО, предложено использовать: продувку воздухом массива отходов, увлажнение (рециркуляция фильтрата) и добавление реагентов в массив ТБО. Таким образом, регулируемыми параметрами будут выступать:
- наличие кислорода в теле полигона (В);
- влажность массива ТБО (
 );
); - активная реакция среды (рН).
2. Структурная схема модели многоконтурной системы управления полигоном ТБО.
Для построения системы управления полигоном ТБО использована система линейных дифференциальных уравнений или соответствующие изображения по Лапласу в частотной области комплексной переменной s [2]. На рисунке 2 показана многомерная структурная схема системы регулирования процессами на полигоне ТБО, включающая системы с k –возмущениями, l – управлениями (l=3) и m – наблюдениями (выходами, m=3), связанные зависимостью
![]() (1)
(1)
где d(s), u(s), y(s) – векторы возмущения, управления и выхода соответственно
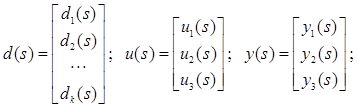 (2)
(2)
G(s) – матричная передаточная функция системы по управлению (g l m – элемент матрицы, связывающий вектор: наблюдение, управление)
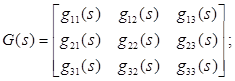 (3)
(3)
Gd(s) – матричная передаточная функция системы по возмущению (g l k – элемент матрицы, связывающий вектор: наблюдение, возмущение)
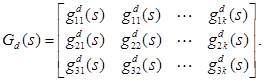 (4)
(4)
Формирование управляющего воздействия u(s) будет определяться многомерным регулятором Gc(s) с учётом ошибки рассогласования
![]()
где ![]()
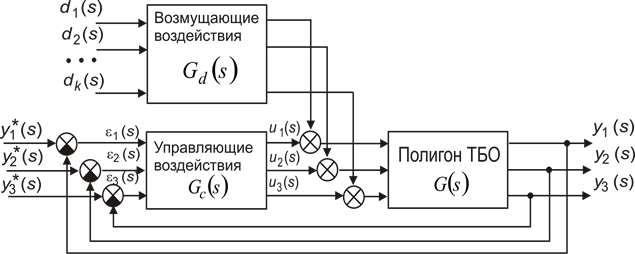
Рисунок 2 – Структурная схема системы регулирования полигона ТБО
Многомерный регулятор Gc(s) представлен матрицей диагонального вида (элементы gll(s), соответствующие одноконтурным (одномерным) регуляторам, задают определённый закон управления)
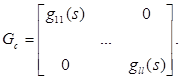 (5)
(5)
3. Физическое моделирование.
3.1 Лабораторная установка биодеструкции отходов.
Лабораторная установка была выполнена в виде реактора, имитирующего тело полигона ТБО с отходами определённого морфологического состава. Реактор позволял регулировать водно-воздушный режим массива отходов (рисунок 3).
Задачей исследований являлась оценка степени биодеструкции отходов в реакторе. Для ускорения процесса биодеструкции отходов проводилось управление реактором за счет орошения стабилизированным фильтратом с добавлением известкового молока и продувкой воздухом. Основными измеряемыми параметрами являлись физико-химические величины: pН, концентрация ионов тяжёлых металлов, аммонийного азота в фильтрате, объем образующегося фильтрата и влажность отходов.
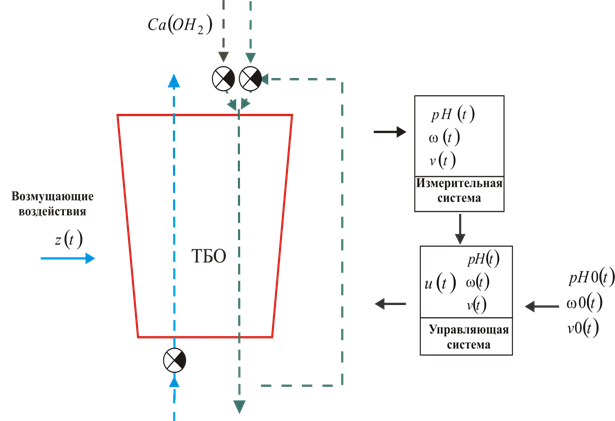
Рисунок 3 – Схема управления лабораторной установкой:
–––– продувка массива ТБО; – – – рециркуляция фильтрата;
Са(ОН)2 – подача известкового молока
3.2 Исследования по определению оптимальных параметров биодеструкции отходов.
Соотношение управляющих воздействий (u) и параметров мониторинга эмиссионных потоков показано в таблице 1.
Таблица 1 – Управляющие воздействия и мониторинг эмиссионных потоков
|
№ |
Управляющие воздействия, u |
Наблюдаемый параметр, y |
|
1 |
Продувка массива |
Соотношение СН4 / CO2 |
|
2 |
Орошение |
pH |
|
3 |
Добавление реагентов |
Концентрации ионов тяжёлых металлов |
Результаты исследований показали, что оптимальными физико-химическими параметрами массива отходов являются:
1 – наличие кислорода и заполнение пор тела полигона воздухом (В) (Воздух / вода) – 40 / 60 %;
2 – влажность массива ТБО (![]() ) – 60%;
) – 60%;
3 – активная реакция среды (рН) – 8–9,5.
3.3 Исследование взаимосвязей многомерной задачи регулирования.
При синтезе многомерных систем регулирования значительные затруднения связаны с наличием статических и динамических перекрестных связей между различными входами и выходами системы – R. Для исследования связей управляющих воздействий использованы входные ступенчатые сигналы, представляющие инерционное звено первого порядка [1].
Проведенный эксперимент по исследованию взаимного влияния продувки, орошения и обработки известковым молоком (рисунок 4) со ступенчатыми изменениями управляющих воздействий показал, что влажность являлась наиболее важным (доминируемым) фактором, влияющим на объем воздушных пор и рН; продувка оказывала воздействие на рН (рисунок5).
Таким образом, в передаточной матрице (3) были не учтены малозначимые связи:
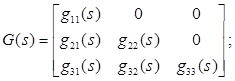 (6)
(6)
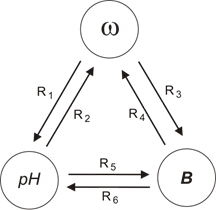
Рисунок 4 – Схема проведения эксперимента по исследованию взаимного влияния продувки, орошения и обработки известковым молоком, R – перекрестные связи управляющих воздействий
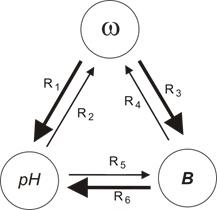
Рисунок 5 – Распределение доминирующих факторов: влажность, наличие кислорода (воздуха), рН
4. Математическая модель управления полигоном ТБО во временной области.
Эквивалентной моделью (модели с комплексной переменной s (1)) линейной системы является модель во временной области
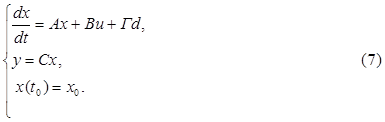
где x – n-мерный вектор состояний;
d – k-мерный вектор возмущений ;
u – m-мерный вектор управлений (m=3);
y – l-мерный вектор наблюдений (l =3).
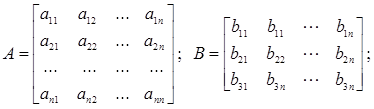
Матрицы А – состояний, В – управлений, С – наблюдений и Г – возмущений соответствующих размерностей
 (8)
(8)
 (9)
(9)
Алгоритм решения задачи (1–9) сводится к определению передаточной функции объекта (6) [4], преобразования уравнений из частотной во временную область [7].
Для моделирования на ЭВМ процесса многомерной СУТП необходимо преобразование дифференциальных уравнений к дискретной конечно-разностной форме [6]. Практическое внедрение предложенных моделей управления полигоном ТБО было представлено в [5] в рамках комплекса системы автоматизированного проектирования и управления «АРМ ТБО» [8].
Заключение
В работе решена актуальная задача, заключающаяся в разработке автоматизированной системы управления состоянием полигонов ТБО, и получены следующие основные результаты.
1. Выявлены взаимосвязи исходных и внутренних факторов, влияющих на состояние полигона, что позволило разработать передаточную матрицу, учитывающую перекрестные связи контуров управления полигоном.
2. Разработана система линейных дифференциальных уравнений в частотной и временной областях, реализующих многоконтурную систему управления полигоном ТБО.
3. Даны подходы к численному решению системы дифференциальных уравнений в конечно-разностной форме.
Рецензенты:
Середа Татьяна Геннадьевна, д.т.н., доцент, профессор кафедры математики и естественно-научных дисциплин Пермского филиала ФГБОУ ВПО «Российская академия народного хозяйства и государственной службы при Президенте Российской Федерации», г. Пермь.
Зубарева Галина Николаевна, д.т.н., с.н.с., профессор кафедры строительного производства и материаловедения ФГБОУ ВПО «Пермская государственная сельскохозяйственная академия имени Д.Н. Прянишникова», г. Пермь.
Библиографическая ссылка
Костарев С.Н. РАЗРАБОТКА ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ УПРАВЛЕНИЯ ПОЛИГОНОМ ТВЁРДЫХ БЫТОВЫХ ОТХОДОВ // Современные проблемы науки и образования. 2013. № 1. ;URL: https://science-education.ru/en/article/view?id=8566 (дата обращения: 04.08.2026).