


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
THE CORTEGE-METHOD OF TRAINING SET FOR INCREASE OF ACCURACY NEURONET APPROXIMATION OF DATA

Введение и постановка задачи
Задачу аппроксимации дискретных данных, содержащих как нормальные, так и аномальные шумовые выбросы, сформулируем в одномерной постановке. Пусть имеется исходная дискретная функциональная зависимость ![]() , где
, где ![]() , описывающаяся линейным законом:
, описывающаяся линейным законом:
![]() (1)
(1)
где ![]() ,
, ![]() – исходные значения параметров зависимости (1).
– исходные значения параметров зависимости (1).
Предположим, что при экспериментальном построении функциональной зависимости ![]() система регистрации и/или наблюдения подвержена влиянию случайных искажений – как нормального гауссовского шума
система регистрации и/или наблюдения подвержена влиянию случайных искажений – как нормального гауссовского шума ![]() с нулевым математическим ожиданием
с нулевым математическим ожиданием ![]() и небольшой дисперсией
и небольшой дисперсией ![]() так и аномальных помех импульсной (аппликативной) структуры.
так и аномальных помех импульсной (аппликативной) структуры.
В результате наблюдаемая последовательность экспериментальных данных описывается моделью:
 (2)
(2)
где ![]() – вероятности возникновения нормальных ошибок при измерении величины в
– вероятности возникновения нормальных ошибок при измерении величины в ![]() -х моментах времени
-х моментах времени ![]() ;
; ![]() – функция генерирования случайного значения зависимости
– функция генерирования случайного значения зависимости ![]() на интервале
на интервале ![]() с равномерным распределением случайной величины.
с равномерным распределением случайной величины.
В качестве примера на рис. 1 приведена одна из реализаций модели наблюдения (2) для случая, когда вероятности ![]() (2) изменяются с течением времени по закону
(2) изменяются с течением времени по закону ![]() .
.
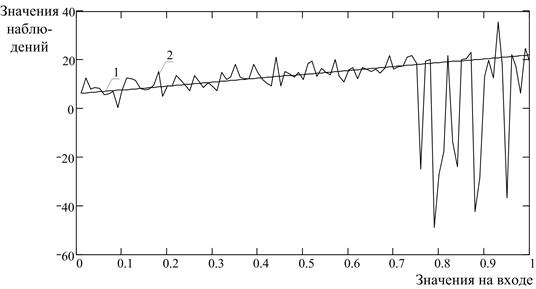
Рис. 1. Исходная линейная зависимость (1) и ее деградация (2) в результате воздействия нормально-аномальных помех
Как видно из рис. 1, в результате воздействия аномальных импульсных помех (2) на нормальную смесь ![]() , последняя утратила свойство стационарности во времени
, последняя утратила свойство стационарности во времени ![]() .
.
Задачу сформулируем в виде, отличающемся от классического метода наименьших квадратов (МНК) [5]. Необходимо найти вектор таких значений оценок ![]() и
и ![]() параметров
параметров ![]() и
и ![]() (1), которые являлись бы аргументами минимума:
(1), которые являлись бы аргументами минимума:
 (3)
(3)
Особенности нейросетевой аппроксимации нестационарных данных
Для решения сформулированной задачи (3) может быть использован аппарат адаптивных линейных нейронных сетей (НС), т.е. сетей с линейными функциями активации.
Адаптивная нейронная система представляет собой линейный сумматор, основным свойством которого является изменяющееся во времени функционирование с саморегулированием [7]. Если сигнал подается на вход системы для определения свойств по ее отклику, то система адаптируется к этому определенному входному сигналу и тем самым изменяет собственную параметрическую организацию [7].
В адаптивной нейронной системе вектор весов ![]() зависит от выходного сигнала, а также от полезного отклика или обучающего сигнала
зависит от выходного сигнала, а также от полезного отклика или обучающего сигнала ![]() .
.
В процессе обучения вектор весов самонастраивается таким образом, чтобы на ![]() -м шаге выходной сигнал нейронной сети
-м шаге выходной сигнал нейронной сети ![]() имел наилучшее соответствие полезному отклику
имел наилучшее соответствие полезному отклику ![]() . Для этого выходной сигнал сравнивается с полезным откликом, на основе чего вырабатывается сигнал ошибки, корректирующий вектор весов на каждом шаге итерации. Для решения задачи аппроксимации в одномерной постановке (3) достаточно использования единственного адаптивного нейрона с двумя входами и линейной функцией активации.
. Для этого выходной сигнал сравнивается с полезным откликом, на основе чего вырабатывается сигнал ошибки, корректирующий вектор весов на каждом шаге итерации. Для решения задачи аппроксимации в одномерной постановке (3) достаточно использования единственного адаптивного нейрона с двумя входами и линейной функцией активации.
В этом случае для нейрона формируется функционал ошибки ![]() , имеющий, как правило [1, 7] квадратичный вид:
, имеющий, как правило [1, 7] квадратичный вид:
![]() , (4)
, (4)
где ![]() – выход нейрона, описывающийся выражением:
– выход нейрона, описывающийся выражением:
 , (5)
, (5)
где ![]() – двухкомпонентный входной вектор, 1-я компонента которого представляет собой время наблюдения
– двухкомпонентный входной вектор, 1-я компонента которого представляет собой время наблюдения ![]() (2), а вторая – единичный вход;
(2), а вторая – единичный вход; ![]() – 2-х компонентный вектор весов, соответствующий
– 2-х компонентный вектор весов, соответствующий ![]() .
.
Подставив (5) в выражение функционала ошибки (4), имеем:
![]() . (6)
. (6)
При использовании методов обучения 1-го порядка (градиентных методов), правило самонастройки вектора весов ![]() вытекает из градиента функционала ошибки по настраиваемым параметрам – весам. В нашем случае компоненты градиента функционала ошибки (6) примут вид:
вытекает из градиента функционала ошибки по настраиваемым параметрам – весам. В нашем случае компоненты градиента функционала ошибки (6) примут вид:
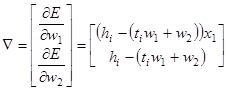 . (7)
. (7)
Поскольку значения компонентов вектора весов на ![]() -м шаге обучения должны изменяться в направлении антиградиента ошибки, правило их самонастройки будет иметь вид:
-м шаге обучения должны изменяться в направлении антиградиента ошибки, правило их самонастройки будет иметь вид:
![]() , (8)
, (8)
где ![]() – новое значение вектора весов;
– новое значение вектора весов; ![]() – текущее значение весов;
– текущее значение весов; ![]() – параметр, определяющий приращения, от которых зависит устойчивость и скорость сходимости алгоритма обучения.
– параметр, определяющий приращения, от которых зависит устойчивость и скорость сходимости алгоритма обучения.
В частности, как показано в [7], в случае стационарных обучающих пар «![]() » условие сходимости алгоритма выполняется, если значение параметра
» условие сходимости алгоритма выполняется, если значение параметра ![]() удовлетворяет неравенству:
удовлетворяет неравенству:
![]() , или
, или ![]() , (9)
, (9)
где ![]() – максимальное собственное значение корреляционной матрицы
– максимальное собственное значение корреляционной матрицы ![]() входного сигнала;
входного сигнала; ![]() – след (сумма диагональных элементов) матрицы
– след (сумма диагональных элементов) матрицы ![]() .
.
К сожалению, для рассматриваемого нестационарного случая в виде нормально-аномальной модели (2) правило (9) не подходит, и выбор параметра ![]() должен осуществляться экспериментально. Как показали численные исследования, в данном нестационарном случае может быть использован адаптивный выбор величины параметра
должен осуществляться экспериментально. Как показали численные исследования, в данном нестационарном случае может быть использован адаптивный выбор величины параметра ![]() [1]:
[1]:
 . (10)
. (10)
В работе [2] указано, что решение задачи аппроксимации данных, зашумленных нормальным шумом ![]() , адаптивным линейным нейроном (4)-(8) и классическим МНК дает приблизительно одинаковые значения параметров
, адаптивным линейным нейроном (4)-(8) и классическим МНК дает приблизительно одинаковые значения параметров ![]() и
и ![]() . Вместе с тем, в случае, когда аппроксимируемые данные описываются нормально-аномальной моделью (2), точностные характеристики МНК и линейного нейроэлемента (4)-(8) различаются достаточно сильно. В частности, установлено, что аномальные выбросы (на рис. 1 – в точках
. Вместе с тем, в случае, когда аппроксимируемые данные описываются нормально-аномальной моделью (2), точностные характеристики МНК и линейного нейроэлемента (4)-(8) различаются достаточно сильно. В частности, установлено, что аномальные выбросы (на рис. 1 – в точках ![]() ) сильно влияют на оцениваемые по МНК параметры
) сильно влияют на оцениваемые по МНК параметры ![]() и
и ![]() , поэтому точность МНК падает. В тоже время установлено, что точность оценивания параметров
, поэтому точность МНК падает. В тоже время установлено, что точность оценивания параметров ![]() и
и ![]() с использованием линейного нейрона зависит прежде всего от положения аномальных измерений в выборке. Так, для наблюдения рис. 1 абсолютные ошибки оценивания параметров составили: для МНК –
с использованием линейного нейрона зависит прежде всего от положения аномальных измерений в выборке. Так, для наблюдения рис. 1 абсолютные ошибки оценивания параметров составили: для МНК – ![]() ,
, ![]() ; глобальной численной оптимизации –
; глобальной численной оптимизации – ![]() ,
, ![]() ; адаптивного линейного нейрона –
; адаптивного линейного нейрона – ![]() ,
, ![]() . Видно, что точность оценивания параметров в данном случае выше у МНК и метода глобальной численной оптимизации. Оценки параметров, даваемые последними двумя методами, в каждом случае совпадают, поэтому остановимся на сравнении адаптивного линейного нейроэлемента с классическим МНК.
. Видно, что точность оценивания параметров в данном случае выше у МНК и метода глобальной численной оптимизации. Оценки параметров, даваемые последними двумя методами, в каждом случае совпадают, поэтому остановимся на сравнении адаптивного линейного нейроэлемента с классическим МНК.
Для наблюдения, аналогичного рис. 1, но с аномальными помехами, находящимися в точках первой половины выборки (![]() ), типичные абсолютные ошибки оценивания составляют:
), типичные абсолютные ошибки оценивания составляют: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Метод и алгоритмы кортежирования обучающей выборки для повышения точности нейросетевой аппроксимации данных
Анализ применимости известных методов к задаче аппроксимации нестационарных данных позволил сделать важный вывод, заключающийся в том, что для снижения абсолютных ошибок оценивания параметров, обучение адаптивного линейного нейрона должно начинаться с аномальных измерений и заканчиваться на нормальных. В случае, когда аномальные измерения имеют место в начальных точках времени наблюдения ![]() (2), обучение нейрона начинается с этих аномальностей, поэтому использование метода кортежирования не требуется. Если аномальности находятся в конечных точках временного интервала наблюдения (рис. 1), либо равномерно распределены на этом интервале, снизить абсолютные ошибки оценивания параметров возможно на основе формирования определенной последовательности обучающих пар (вход
(2), обучение нейрона начинается с этих аномальностей, поэтому использование метода кортежирования не требуется. Если аномальности находятся в конечных точках временного интервала наблюдения (рис. 1), либо равномерно распределены на этом интервале, снизить абсолютные ошибки оценивания параметров возможно на основе формирования определенной последовательности обучающих пар (вход ![]() – выход
– выход ![]() ), такой, при которой сначала следуют аномальные измерения (в порядке снижения своей «аномальности»), а затем – нормальные. При этом последовательность обучающих пар, сформированную по указанному выше правилу, будем называть кортежем обучающей выборки (кортеж – упорядоченный по определенному правилу набор, конечная последовательность каких-либо объектов) [4].
), такой, при которой сначала следуют аномальные измерения (в порядке снижения своей «аномальности»), а затем – нормальные. При этом последовательность обучающих пар, сформированную по указанному выше правилу, будем называть кортежем обучающей выборки (кортеж – упорядоченный по определенному правилу набор, конечная последовательность каких-либо объектов) [4].
В качестве метода кортежирования обучающего множества (т.е. формирования кортежей обучающих пар) в условиях сформулированной в виде (1)-(3) задачи, можно использовать построение вариационных рядов локальных отклонений от наблюдений ![]() (2) и рядов аналогов производных – локальных конечных разностей
(2) и рядов аналогов производных – локальных конечных разностей ![]() [6]. В первом случае алгоритм кортежирования обучающей выборки будет иметь следующий вид [6].
[6]. В первом случае алгоритм кортежирования обучающей выборки будет иметь следующий вид [6].
Алгоритм 1.
Шаг 1. Вычисление нормированных локальных отклонений каждого измерения
![]() (2):
(2):
![]() , (11)
, (11)
где символ ![]() означает математическое ожидание наблюдения
означает математическое ожидание наблюдения ![]() .
.
Шаг 2. Построение вариационного ряда (в порядке убывания) локальных отклонений ![]() , вычисленных на шаге 1:
, вычисленных на шаге 1:
![]() ,
, ![]() . (12)
. (12)
Шаг 3. Построение обучающих пар ![]() из последовательности
из последовательности ![]() в новую последовательность (кортеж)
в новую последовательность (кортеж) ![]() , соответствующую вариационному ряду
, соответствующую вариационному ряду ![]() (12).
(12).
Таким образом, после применения алгоритма 1 обучение адаптивного линейного нейрона будет начинаться с обучающих пар, имеющих наибольшую дисперсию (т.е. аномальность) и заканчиваться на парах с наименьшей дисперсией.
Во многих практических приложениях значения ![]() (11) определить не представляется возможным, например, доступна только одна реализация наблюдений
(11) определить не представляется возможным, например, доступна только одна реализация наблюдений ![]() . В этом случае для построения алгоритма кортежирования можно использовать аналоги производной – локальные конечные разности. При этом алгоритм будет иметь следующий вид [6].
. В этом случае для построения алгоритма кортежирования можно использовать аналоги производной – локальные конечные разности. При этом алгоритм будет иметь следующий вид [6].
Алгоритм 2.
Шаг 1. Вычисление значений квадратов локальных конечных разностей (1-го порядка) наблюдений ![]() :
:
 (13)
(13)
Шаг 2. Построение вариационного ряда (в порядке убывания квадратов конечных разностей ![]() (13), вычисленных на шаге 1:
(13), вычисленных на шаге 1:
![]() ,
, ![]() . (14)
. (14)
Шаг 3. Перестроение обучающих пар ![]() из последовательности
из последовательности ![]() в кортеж
в кортеж ![]() , соответствующий вариационному ряду
, соответствующий вариационному ряду ![]() (14).
(14).
Результаты численного моделирования предлагаемого метода
На рис. 2 и 3 приведены поверхности ошибок, а также траектории движения весов нейрона при его обучении на нормально-аномальных наблюдениях (рис. 1) без алгоритмов кортежирования (рис. 2) и с алгоритмом кортежирования (13)-(14) (рис. 3).
а)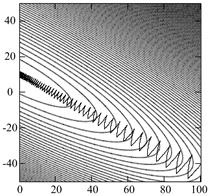 б)
б)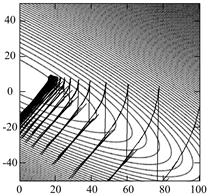 в)
в)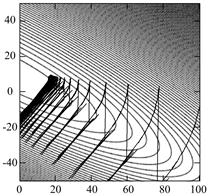
Рис. 2 Траектории весов нейрона на поверхности ошибок без использования алгоритмов кортежирования: а – недорегулированный процесс, (![]() ); б – перерегулированный процесс, (
); б – перерегулированный процесс, (![]() ); в – адаптивный шаг (10)
); в – адаптивный шаг (10)
В случае, представленном на рис. 2, абсолютные величины ошибок аппроксимации составили:  ,
,  ,
,  ,
,  .
.
а)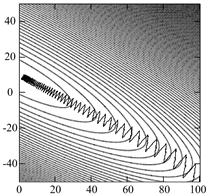 б)
б)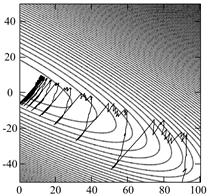 в)
в)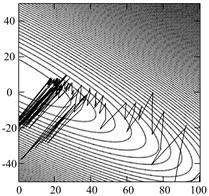
Рис. 3 Траектории весов нейрона на поверхности ошибок при использовании алгоритма кортежирования:
а – недорегулированный процесс, (![]() ); б – перерегулированный процесс, (
); б – перерегулированный процесс, (![]() ); в – адаптивный шаг (10)
); в – адаптивный шаг (10)
В случае, представленном на рис. 3, абсолютные величины ошибок аппроксимации составили: ,  ,
,  ,
,  .
.
Заключение
В работе выявлена важная особенность аппроксимации нестационарных данных моделью однослойной линейной нейронной сети. Эта особенность заключается в том, что точность оценивания искомых параметров аппроксимируемой зависимости существенно зависит от положения аномальных данных на интервале наблюдения. В случае, когда аномальные данные преобладают на начальном интервале наблюдения, а на остальном – нормальные, адаптивная линейная нейронная сеть позволяет получить более точные оценки искомых параметров по сравнению с классическим МНК. И наоборот, если аномальные данные присутствуют на конечном интервале наблюдения, нейронная сеть проигрывает по точности МНК. Указанная особенность позволила разработать метод кортежирования обучающих данных, заключающийся в их предварительной перетасовке в обучающей выборке по правилу убывания степени нестационарности.
Исследование проведено при поддержке Министерства образования и науки Российской Федерации, соглашение 14В37.21.2067
Рецензенты:
Елисеев Александр Вячеславович, доктор технических наук, доцент, профессор кафедры "Радиоэлектроника", Минобрнауки России, Ростовский технологический институт сервиса и туризма (филиал) Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Южно-Российский государственный университет экономики и сервиса», г. Ростов-на-Дону.
Мищенко Сергей Евгеньевич, доктор технических наук, профессор, ведущий научный сотрудник, Федеральное государственное унитарное предприятие "Ростовский научно-исследовательский институт радиосвязи" Федеральный научно-производственный центр, г.Ростов-на-Дону.
Библиографическая ссылка
Челахов В.М., Деркачев К.В. МЕТОД КОРТЕЖИРОВАНИЯ ОБУЧАЮЩЕЙ ВЫБОРКИ ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ НЕЙРОСЕТЕВОЙ АППРОКСИМАЦИИ ДАННЫХ // Современные проблемы науки и образования. 2012. № 6. ;URL: https://science-education.ru/en/article/view?id=7869 (дата обращения: 23.07.2026).