


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
IMPLEMENTATION THE SUCCESSFUL LAUNCH AND STABLE OPERATION SYNCHRONIZED WITH ELECTRIC ADAPTIVE CONTROLLER

Введение. При решении задач управления синхронными приводами без датчика положения ротора встают два основных вопроса: обеспечение стабильного режима запуска синхронного двигателя с полной нагрузкой [5] и подавление автоколебаний на заданной скорости. При реализации синхронного частотного пуска по схеме с питанием ротора от звена постоянного тока инвертора тока не требуется дополнительных пусковых силовых элементов на стороне статора или ротора, изменяется только система управления ПЧ по отношению к схеме управления статическими режимами. Поэтому наряду с достоинствами синхронный частотный пуск требует усложнения системы автоматического управления. Наряду с этим возникает необходимость в косвенной оценке угла нагрузки электропривода.
Построение системы управления режимом пуска.
Проведенные ранее исследования [1, 2] показали, что устойчивый пуск синхронизированного привода можно осуществить при управлении инвертором тока по каналу релейного регулятора тока (сигналы управления формирует БЗI, рис.1). При таком способе управления электропривод обеспечивает плавный запуск с поддержанием постоянного динамического момента, при этом сама система управления является скалярной (без датчика положения ротора и без привязки векторов формируемых токов статора к положению ротора).
Модель системы управления (рис.1) позволяет производить изменение режима работы автономного инвертора тока и управлять ключами в функции, либо по каналу релейного регулятора напряжения, либо по каналу релейного регулятора тока. При этом система управления формирует задание на амплитуду и частоту фазных напряжений или амплитуду и частоту фазных токов соответственно.
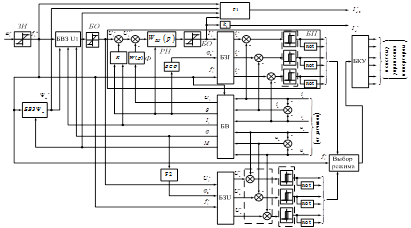
Рис.1. Функциональная схема системы управления синхронизированным электроприводом с блоком регулирования тока возбуждения и регулированием главного потокосцепления
Поскольку система управления скалярная, задание на частоту тока подается по заранее определенному темпу из условий обеспечения такого динамического момента, при котором ускорение двигателя не превышает предельно допустимого значения:
![]() . (1)
. (1)
Темп формируется входным задатчиком интенсивности (ЗИ) (рис. 1).
Когда работает канал релейного регулятора напряжения задание на ток формируется как выходной сигнал регулятора напряжения статора, задание на напряжение формируется блоком вычисления задания напряжения (БВЗU1) и определяется по формуле:
![]() (2)
(2)
Разгон можно условно разделить на два этапа: разгон с регулированием напряжения статора пропорционально заданию на частоту тока статора; разгон с постоянным заданием на напряжение при достижении предела по выходному напряжению инвертора. Достижение ограничения по напряжению объясняется тем, что разгон осуществляется с заданием на потокосцепление в воздушном зазоре большего номинального значения. Это необходимо для обеспечения надежного и устойчивого процесса пуска синхронизированного электропривода.
При достижении электроприводом заданной скорости происходит снижение задания на потокосцепление до номинального значения. При неизменном задании на частоту тока статора электропривод обладает повышенной склонностью к автоколебаниям ротора, а вместе с ним и угла нагрузки ![]() . По этой причине в систему управления необходимо ввести дополнительный адаптивный контур стабилизации угла нагрузки.
. По этой причине в систему управления необходимо ввести дополнительный адаптивный контур стабилизации угла нагрузки.
Введение адаптивного регулятора угла нагрузки
Разработанная скалярная система управления обеспечивает поддержание на заданном уровне величины потокосцепления во всех режимах работы, однако, синхронный привод склонен к автоколебаниям ротора, а вместе с ним и угла нагрузки ![]() . Для гашения самопроизвольных «качаний» ротора в систему управления был добавлен контур стабилизации угла нагрузки
. Для гашения самопроизвольных «качаний» ротора в систему управления был добавлен контур стабилизации угла нагрузки ![]() .
.
Основными теоретическими положениями [3] для создания вышеупомянутого блока стали следующие:
- частота свободных колебаний угла нагрузки определяется параметрами как электрической, так и механической частей привода;
- статическая нагрузка привода определяется средней за период свободных колебаний величиной угла нагрузки ![]() ;
;
- для гашения свободных колебаний электропривода были использованы положения теории классической механики, согласно которым для успешного подавления колебаний управляющее воздействие должно прикладываться в фазе с колебаниями системы.
Структурная схема контура стабилизации угла нагрузки ![]() представлена на рис.2.
представлена на рис.2.
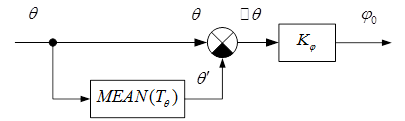
Рис. 2. Структурная схема контура стабилизации угла нагрузки ![]() :
:
![]() – блок вычисления среднего значения угла нагрузки
– блок вычисления среднего значения угла нагрузки ![]() со временем осреднения
со временем осреднения ![]() ;
; ![]() – блок масштабирования отклонения мгновенного значения угла нагрузки
– блок масштабирования отклонения мгновенного значения угла нагрузки ![]() и его перевода в управляющее воздействие на положение вектора тока статора
и его перевода в управляющее воздействие на положение вектора тока статора
Величину масштабирующего коэффициента ![]() выберем, исходя из требований интенсивности стабилизации угла нагрузки.
выберем, исходя из требований интенсивности стабилизации угла нагрузки. ![]() должен быть меньше единицы, иначе система станет неустойчивой, однако, чем ближе его величина к единице, тем больше быстродействие контура стабилизации угла нагрузки
должен быть меньше единицы, иначе система станет неустойчивой, однако, чем ближе его величина к единице, тем больше быстродействие контура стабилизации угла нагрузки ![]() . Из этих соображений для каждого отдельно взятого электропривода подбирается величина коэффициента
. Из этих соображений для каждого отдельно взятого электропривода подбирается величина коэффициента ![]() .
.
Постоянная времени осреднения должна быть обязательно не меньше периода свободных колебаний системы электропривода. Однако при выборе слишком большой величины этой постоянной времени это может привести к ухудшению динамических характеристик системы при изменении нагрузки на валу. Поэтому эту постоянную времени необходимо выбирать в пределах ![]() , где
, где ![]() – период свободных колебаний разомкнутой системы электропривода.
– период свободных колебаний разомкнутой системы электропривода.
В результате моделирования были сняты динамические характеристики наиболее важных величин, которые характеризуют работу разработанного электропривода. Динамические характеристики рис. 3 a, б были получены при пуске с Мс = Мном и J = Jдв, с системой стабилизации угла нагрузки ![]() . Также были получены динамические характеристики при отключенном блоке коррекции угла нагрузки
. Также были получены динамические характеристики при отключенном блоке коррекции угла нагрузки ![]() рис. 4 а, б.
рис. 4 а, б.
а)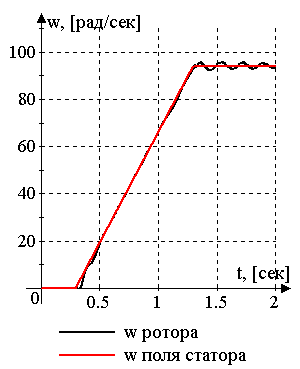 б)
б)
Рис. 3. Динамические характеристики с системой стабилизации угла нагрузки ![]()
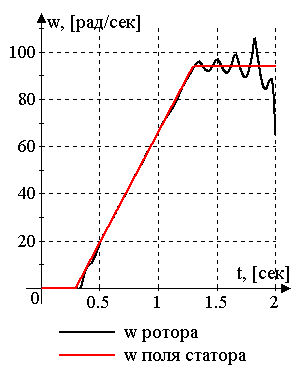
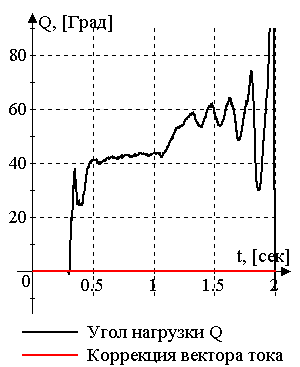
Рис. 4. Динамические характеристики без системы стабилизации угла нагрузки ![]()
Результаты. В заключение необходимо отметить, что получена система управления автоматизированным электроприводом, обладающим абсолютно жесткими механическими характеристиками, обеспечивающего надежный пуск с номинальной нагрузкой и удовлетворяющая требованиям устойчивости в статическом режиме.
Рецензенты:
Прокофьев Геннадий Иванович, д.т.н., профессор, заведующий кафедрой РАПС Санкт-Петербургского государственного электротехнического университета, г. Санкт-Петербург.
Блинов Юрий Иванович, д.т.н., профессор, заведующий кафедрой ЭТПТ Санкт-Петербургского государственного электротехнического университета, г. Санкт-Петербург.
Библиографическая ссылка
Мещеряков В.Н., Башлыков А.М., Вейнмейстер А.В. РЕАЛИЗАЦИЯ УСПЕШНОГО ЗАПУСКА И СТАБИЛЬНОЙ РАБОТЫ СИНХРОНИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА С ПРИМЕНЕНИЕМ АДАПТИВНЫХ РЕГУЛЯТОРОВ // Современные проблемы науки и образования. 2012. № 6. ;URL: https://science-education.ru/en/article/view?id=7543 (дата обращения: 23.07.2026).