


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
ANALYSIS OF DYNAMIC PROCESSES IN BURNISHERS OF HOLES

Как известно, при обработке внутренних цилиндрических поверхностей во многих случаях после обработки резанием широко используется чистовая обработка поверхностным пластическим деформированием роликовыми раскатниками. В то же время динамика процесса такой обработки изучена недостаточно, хотя динамические явления – один из важнейших факторов, влияющих на надёжность любых механизмов.
Рассмотрим динамику процесса обработки внутренней цилиндрической поверхности на примере конструкции однороликового раскатника с упругим элементом. Расчётную схему такого устройства, работающего в системе координат x,y,z, можно представить (рис. 1) в виде консольного вала с жесткостью в поперечном направлении k1 (борштанга раскатника),
массой mв и длиной lв, вращающегося с угловой скоростью ω. На валу жестко закреплён раскатник.
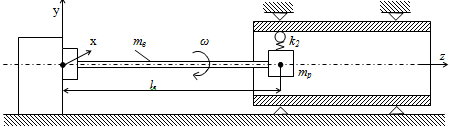
Рис. 1. Схема процесса раскатывания отверстия: mв - масса вала; mр - масс раскатника; k2 - жёсткость упругого элемента раскатника; lв - длина вала с раскатником
В состав раскатника массой mр входят упругий элемент с коэффициентом жесткости k2 и ролик. Последний совершает вращательное движение, раскатывая отверстие и радиальное вместе с верхним концом упругого элемента в результате кинематического взаимодействия с неровностями внутренней цилиндрической поверхности обрабатываемой заготовки. Под действием возникающих при этом сил деформируется консольный вал, смещая свой конец с корпусом раскатника относительно оси вращения. В общем случае имеются также силы, прижимающие ролик раскатника к поверхности заготовки, которые могут быть постоянными или переменными с течением времени. В месте контакта ролика с заготовкой имеет место упругая (местная) деформация обрабатываемой поверхности, которая на два и более порядка меньше пластической деформации, и ей можно пренебречь [4]. Массу ролика также можно не учитывать по сравнению с массами вала и раскатника.
Таким образом, мы имеем динамическую модель, состоящую, исключая силы, из двух масс и двух упругих элементов. Масса вала рассредоточена по его длине и для упрощения модели её желательно привести в одну точку, совпадающую с концом вала и центром сосредоточенной массы раскатника. Тогда модель станет одномассовой.
Для этого представим вал в виде стержня, жёстко закреплённого одним концом и изгибающегося под действием силы Р, приложенной на другом свободном конце (рис. 2).
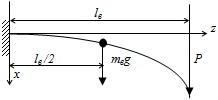
Рис. 2. Стержень (вал), изгибающийся под действием силы Р: lв - длина стержня; mвg - вес стержня
Это известная задача, и для невесомого стержня уравнение кривой изгиба стержня записывается следующим образом:
![]() (1)
(1)
Отклонение на конце стержня
![]() ,(2)
,(2)
где Е – модуль Юнга; I – момент инерции сечения стержня относительно горизонтальной оси, проходящей через его центр масс.
Если учесть вес стержня равный mвg (g – ускорение свободного падения), то легко показать, что
![]() (3)
(3)
При z = lв
![]() (4)
(4)
Сравнивая формулы (2) и (4) видим, что при учёте массы стержня, сила Р увеличивается на четверть веса стержня.
Таким образом, параметры одномассовой модели: невесомый вал с поперечной жёсткостью k1, масса раскатника и вала m1 = (mp + 0,25mв), упругий элемент раскатника жёсткостью k2, взаимодействующий через невесомый ролик с поверхностью заготовки. Уравнение динамики раскатника можно получить в системе координат u,v,w с началом в точке закрепления вала, вращающейся вместе с валом относительно неподвижной системы координат x,y,z (рис. 3).Такой подход к исследованию динамических явлений используется, например, в работе [2].
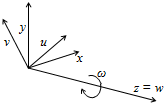
Рис. 3. Системы координат: ω - угловая скорость вращения системы координат u, v,w относительно системы x,y,z
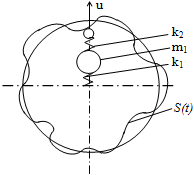
Рис.4. Динамическая модель раскатника: m1 - масса раскатника с валом; k1 - жёсткость вала; k2 - жёсткость упругого элемента раскатника; S(t) - функция, описывающая неровности обрабатываемой поверхности заготовки.
Если в начальный момент масса m1 и упругие элемен6ты k1 и k2 располагаются вдоль проекции оси координат u (рис. 4), то дифференциальное уравнение, описывающее одномассовую модель, представляется в следующем виде:
![]() ,(5)
,(5)
где S2(t) – функция, описывающая перемещение роликов по неровностям внутренней цилиндрической поверхности обрабатываемой заготовки (кинематическое взаимодействие);
![]()
– совместная жесткость упругих элементов k1 и k2 , воспринимающих перемещение S2(t).
Для многороликовых раскатников функция S2(t) находится как векторная сумма перемещений каждого ролика.
Рассмотрим источники возбуждения колебаний при работе раскатников и их математическое моделирование в уравнениях динамики. Известны [3,1] три способа возбуждения колебаний при рассмотрении динамических явлений в механизмах и машинах:
1) силовое возбуждение – колебания возникают под воздействием переменной силы;
2) кинематическое возбуждение – колебания возникают в результате задаваемого извне перемещения одного из элементов динамической системы;
3) инерционное возбуждение – колебания вызываются вращающимся эксцентриком.
При раскатывании отверстий имеют место второй и третий из перечисленных способов.
Кинематическое возбуждение возникает за счёт неровностей раскатываемой поверхности. Указанные неровности являются погрешностями формы (например – овальность), так как показывает практика, шероховатость поверхности при пластическом её деформировании не влияет на рассматриваемые динамические процессы.
Если представить, что в поперечном сечении цилиндрической заготовки (рис.4) амплитуда неровностей внутренней поверхности описывается периодической функцией S(t) (период равный времени обката длины окружности всегда присутствует), то, в общем случае, эту функцию можно разложить на сумму гармонических составляющих в виде ряда Фурье [6]. Основная гармоническая составляющая с угловой частотой Ω пропорциональна угловой частоте вращения раскатника относительно детали ω: Ω = n∙ω.
Например, при n = 2 профиль контура неровностей выражает овальность, при n = 3 огранку с трёхвершинным профилем.
Таким образом, кинематическое возбуждение колебаний описывается в виде суммы синусоидальных перемещений роликов раскатника.
![]() ,
,
где s0 – нулевой член разложения; sk – коэффициенты ряда Фурье k-й гармоники;
φk – угол сдвига фаз k-й гармоники;
k – порядковый номер составляющей гармоники.
Инерционное возбуждение колебаний раскатника зависит, в общем случае, от двух эксцентриситетов. Первый создаётся отклонением eв оси вращения вала (борштанги) массой mв, на котором крепится раскатник, от оси вращения вала привода. Второй отклонением eр центра масс раскатника массой mр от оси вращения вала привода.
Общий, приведённый к сумме масс эксцентриситет e определим через сумму векторов центробежных сил, действующих на массы mв и mр. Если угол между этими векторами обозначить α, то суммарная центробежная сила W равна
![]() ,
,
и тогда
 (6)
(6)
В случае, если векторы центробежных сил от эксцентриситетов совпадут (наихудший случай)
Отметим, что обобщённая сила, вызванная инерционным возбуждением при постоянной частоте вращения ω, является постоянной, не зависящей от времени величиной. Её вектор вращается совместно с роликами раскатника, а величина (mв + mр)∙e∙ω2, совместно с нулевым членом разложения кинематического возбуждения s0, участвует в прижатии роликов к поверхности заготовки.
Оценим влияние инерционной силы при α = 0. Пусть масса раскатника для раскатывания отверстия диаметром 12 мм mр = 12 кг, масса, вращающего раскатник вала, диаметром 60 мм и длиной 1 м mв = 22 кг, эксцентриситеты соответственно eр = 5 мм, eв = 0,1 мм, частота вращения раскатника ω = 10 с-1.
Тогда e = 1,8 мм, а дополнительная сила прижатия роликов к поверхности заготовки Рдоп = 6,12 Н. При усилии раскатывания более 10000 Н – это ничтожная величина.
Для анализа влияния динамических явлений на конструкцию раскатника согласно уравнению (5) рассмотрим три конструкции двухроликовых раскатников упругого действия, предназначенных для обработки глухих отверстий диаметрами 70, 102 и 115 мм, приведенных в источнике [5]. Параметры раскатников, соответствующие уравнению (5), и усилия раскатывания приведены в таблице.
Значения параметров раскатников для обработки отверстий диаметром d и длиной l
Таблица
|
Параметры раскатников
|
d =70 мм l = 300 мм |
d =102 мм l = 500 мм |
d =115 мм l =400 мм |
|
m1, кг |
3,5 |
9,5 |
9,0 |
|
k1, Н / м |
5∙105 |
3∙105 |
8∙105 |
|
k2, Н / м |
1,7·106 |
1,2·106 |
1,7·107 |
|
Усилие раскатывания, Н |
7000 - 8000 |
10000 - 11000 |
11000 - 12000 |
Данные, приведенные в таблице, и уравнение (5) показывают, что:
1) величина кинематического воздействия k · S2(t) составляет десятки Ньютон и мало влияет на усилие раскатывания (например, при S2(t) = 0,1 мм эта величина для наиболее жесткого раскатника составляет 80 Н);
2) собственные частоты раскатников ![]() находятся в пределах (350 – 1380) с-1, что на порядок больше возможных частот кинематического воздействия кратных частоте вращения борштанги раскатника относительно детали.
находятся в пределах (350 – 1380) с-1, что на порядок больше возможных частот кинематического воздействия кратных частоте вращения борштанги раскатника относительно детали.
Таким образом, динамические явления, причиной которых являются отклонения от правильной формы отверстия, при проектировании раскатников, на первый взгляд, можно не учитывать. Однако если длины раскатников и борштанг l будут в 4 –5 и более раз больше величин, приведённых в таблице, собственные частоты конструкций раскатников станут соизмеримыми с частотами вращения раскатников относительно обрабатываемых деталей, и тогда при совпадении частот возможно возникновение опасных резонансных колебаний. Отсюда следует, что при длинных борштангах необходимо знать собственные частоты конструкций раскатников, чтобы случайно не назначить частоту вращения инструмента, вызывающую резонанс.
Рецензенты:
Сидякин Юрий Иванович, доктор технических наук, профессор, заведующий кафедрой «Металлорежущие станки и инструменты», Волгоградский государственный технический университета, г. Волгоград.
Гордеев Борис Александрович, доктор технических наук, профессор кафедры математики, Нижегородский государственный архитектурно-строительный университет, г. Нижний Новгород.
Библиографическая ссылка
Выходец В.И. АНАЛИЗ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В РАСКАТНИКАХ // Современные проблемы науки и образования. 2012. № 6. ;URL: https://science-education.ru/en/article/view?id=7537 (дата обращения: 23.07.2026).