


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
EXPERIMENTAL STUDY OF OUTPUT VOLTAGE FREQUENCY INTELLECTUAL CONTROL SYSTEMS OF THE SYNCHRONOUS GENERATOR AS PART OF THE ROTARY CONVERTER

В работах [1] и [2] были разработаны модели интеллектуальных систем регулирования частоты выходного напряжения бесконтактного магнитоэлектрического синхронного генератора, входящего в состав электромашинного преобразователя ПТ-500ЦБ, на основе нечеткой логики и нейронной сети. Для подтверждения адекватности разработанных моделей и оценки поведения бесконтактного синхронного генератора с разработанными регуляторами частоты выходного напряжения, с использованием нечеткой логики и нейронной сети в статических и динамических режимах работы, необходимо провести экспериментальные исследования генератора, входящего в состав ПТ-500ЦБ.
Разработанный в [1] интеллектуальный регулятор частоты на основе нейронной сети имеет 3 входа - значения частоты вторичного напряжения ЭМП, тока нагрузки и скорости изменения частоты и 1 выход - значение тока управляющей обмотки двигателя ЭМП. Нейросетевой регулятор частоты представляет собой трехслойную сеть обратного распространения, включающую 3 нейрона во входном слое (по числу компонент входного вектора) с передаточной функцией logsig, 25 нейронов во втором слое с передаточной функцией logsig и 1 нейрон в выходном слое (по числу компонентов выходного вектора) с передаточной функцией purelin. При этом в качестве обучающего алгоритма выбран алгоритм Levenberg-Marquardt (trainlm). Критерием окончания обучения является значение отклонения, при котором обучение будет считаться законченным. Это значение было выбрано равным 0.01. Максимальное количество циклов обучения - 1000.
При использовании в качестве входных переменных нескольких величин получение обучающей выборки является трудно формализуемой задачей и обычно проводится методом проб и ошибок. В работе [1] предлагается более технологичный способ получения обучающей выборки на основе алгоритма глобальной оптимизации (генетического алгоритма). Решением для этого алгоритма является вектор эталонов нейронной сети, при котором функция приспособленности достигает минимального значения. Эта функция производит расчет суммы статической ошибки, провалов и выбросов частоты и времени регулирования частоты. Таким образом, алгоритм производит поиск такого вектора эталонов нейронной сети, чтобы при применении для обучения нейросетевого регулятора этого вектора сумма статической ошибки, провалов и выбросов частоты и времени регулирования частоты была минимальной.
Найденный с помощью генетического алгоритма оптимальный вектор эталонов T был использован для обучения нейронной сети, на основе которой построен регулятор частоты ЭМП.
Разработанный в [2] нечеткий регулятор частоты, так же как и предыдущий регулятор, имеет 3 входа - значения частоты вторичного напряжения ЭМП, тока нагрузки и скорости изменения частоты и 1 выход - значение тока управляющей обмотки двигателя ЭМП. Для формирования нечеткого регулятора частоты определены входные и выходные лингвистические переменные и вид функций принадлежности. Входная лингвистическая переменная «Частота вторичного напряжения» имеет 7 термов, входная переменная «Ток нагрузки» - 5, входная переменная «Скорость изменения частоты вторичного напряжения» - 5, выходная переменная «Ток управляющей обмотки двигателя ЭМП» - 30. Формализация термов реализована с помощью треугольной функции принадлежности (trimf). База правил содержит 175 правил вида «ЕСЛИ x1 есть А1 и x2 есть А2 и x3 есть A3 ТО y есть В», где x1, x2, x3 - входные переменные; у - выход регулятора; A1, A2, A3, B - лингвистические значения переменных.
Для того, чтобы нечеткий регулятор частоты обеспечивал наилучшие показатели качества регулирования, была произведена оптимизация параметров регулятора. Для решения задачи оптимизации был разработан метод на основе генетического алгоритма. Разработанный в [2] метод оптимизации характеристик регулятора на основе нечеткой логики заключается в том, что решение алгоритма кодируется в виде вектора параметров нечеткого регулятора. Функция приспособленности производит расчет суммы статической ошибки, провалов и выбросов частоты и времени регулирования частоты. Таким образом, алгоритм производит поиск такого вектора, чтобы система регулирования на основе нечеткой логики обеспечивала минимальную сумму статической ошибки, провалов и выбросов частоты и времени регулирования частоты.
На рис. 1 представлена структурная схема разработанной лабораторной установки, позволяющей исследовать систему регулирования частоты выходного напряжения ЭМП. Лабораторная установка включает в себя ЭМП, включенный на напряжение 27 В, которое создается на выходе выпрямителя В, нагрузку R16, подключаемую к зажимам генератора ЭМП с помощью ключа К1, и систему регулирования частоты. Выпрямитель подключен к источнику трехфазного напряжения 380 В. Система регулирования включает в себя: компьютер с установленной средой Matlab, в которой производится программная эмуляция комбинированной системы регулирования частоты с элементами искусственного интеллекта (нечеткая логика, нейронная сеть), измерительный орган частоты ИОЧ, датчик тока ДТ, фильтры нижних частот на R9, C9, R10 и C10, транзистор VT1 в цепи обмотки возбуждения двигателя ЭМП, интерфейс передачи данных между компьютером и ЭМП на основе макетной платы AVR-USB-MEGA16. Измерительный орган частоты и датчик тока выполнены на делителях напряжения.
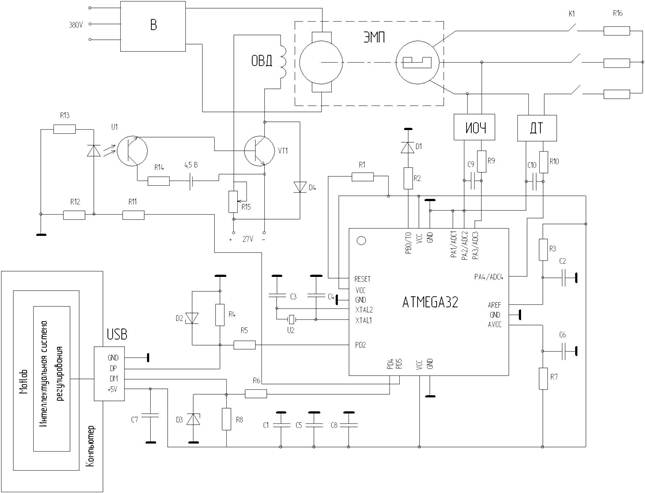
Рис. 1. Схема лабораторной установки
Макетная плата AVR-USB-MEGA16 спроектирована для быстрой разработки низкоскоростных устройств USB на микроконтроллере ATmega32, при этом протокол USB реализован программно, без использования дополнительных специализированных чипов. Это решение хорошо подходит для проектирования таких периферийных устройств для компьютера, которые не требуют высоких скоростей обмена по шине USB (подключение датчиков, устройств ввода, специализированных программаторов для чипов). Программная реализация протокола USB значительно упрощает принципиальную схему и снижает стоимость устройства в целом. Имеются простые примеры работающих устройств (USB HID - управление портами, передача данных) [3].
Программа, прошиваемая в микроконтроллер ATmega32, производит считывание результатов аналого-цифрового преобразования двух входных сигналов при подаче на микроконтроллер управляющего запроса на чтение данных и устанавливает необходимое значение коэффициента заполнения импульсов на одном из выводов микроконтроллера при подаче управляющего запроса на запись данных.
Для обмена данными с компьютером, к которому подключается макетная плата, разработан алгоритм на языке Си на основе библиотеки libusb. В первой части алгоритма производится поиск USB-устройства и возвращается его идентификатор. В основной части алгоритма производится отправка запроса на получение данных с USB-устройства (результатов аналого-цифрового преобразования) либо на запись данных в USB-устройство (значения коэффициента заполнения). В заключительной части происходит закрытие USB-устройства [5].
Поскольку алгоритмы регулирования частоты выходного напряжения синхронного генератора реализованы в среде Matlab, возникла необходимость написания модулей расширения языка Matlab (MEX-файлов) для выполнения описанных выше функций. В модулях-расширениях Matlab для обмена параметрами всех типов с вычислительной средой Matlab используется только одна структура - mxArray. Все типы данных Matlab - массивы, скаляры, строки, клеточные и многомерные массивы, объекты и т.п. выражаются при помощи этой единственной структуры. В программном интерфейсе создаваемой динамической библиотеки должна быть обязательно экспортирована единственная функция с двумя параметрами - входным массивом структур mxArray и выходным массивом структур mxArray. Соответственно, задача модуля расширения заключается в том, чтобы на основе входной информации создать выходной массив. Matlab содержит специальную библиотеку вспомогательных функций, облегчающую работу с тем или иным типом данных внутри расширения Matlab. Сборка (компиляция, связывание и т.п.) модулей производилась из среды Matlab - при помощи команды MEX [4].
В среде Matlab создан алгоритм, который циклически обрабатывает сигналы с двухканального АЦП, вычисляет выходной сигнал нейронной сети или системы нечеткого вывода и выдает задающее воздействие на обмотку возбуждения двигателя ЭМП. При этом производится запись всех текущих значений входных и выходных параметров регулятора для последующей обработки. Таким образом, обеспечивается заданный уровень частоты выходного напряжения ЭМП.
На рис. 2 приведены графики переходных процессов изменения частоты выходного напряжения генератора, при подключении номинальной нагрузки к зажимам генератора с применением интеллектуальных регуляторов. На рис. 2 Δf - провал частоты, t - время переходного процесса регулирования частоты. Из рисунка видно, что при использовании интеллектуальных регуляторов провалы частоты не превышают 10 Гц, время регулирования составляет 0,6 с, причем нейросетевой регулятор обеспечивает меньший провал частоты.
Результаты экспериментальных исследований при внезапном подключении нагрузки, равной 0,25, 0,5, 0,75 и 1 номинальной, приведены в табл. 1. Номинальный ток нагрузки преобразователя ПТ-500ЦБ составляет 8А. Подключение различных величин нагрузки к зажимам генератора производилось с помощью реостата.
Анализ полученных экспериментальных данных позволяет сделать вывод о том, что при подключении нагрузки нечеткий регулятор позволяет уменьшить провалы частоты в среднем в 1,7 раза, нейросетевой регулятор - в среднем в 3,3 раза по сравнению со штатным регулятором.
В переходных процессах быстродействие нечеткого регулятора превышает быстродействие штатного в среднем в 1,5 раза, быстродействие нейросетевого регулятора превышает быстродействие штатного в среднем в 1,84 раза.
|
а |
б |
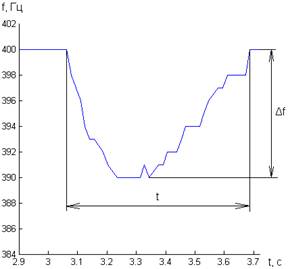
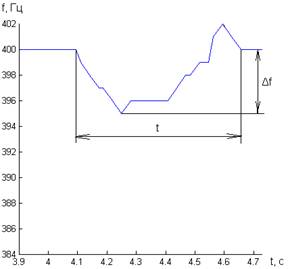
Рис. 2. Графики частоты выходного напряжения генератора при подключении номинальной нагрузки: а - с применением нечеткого регулятора; б - с применением нейросетевого регулятора
Таблица 1. Результаты экспериментальных исследований интеллектуальных систем регулирования частоты
|
|
нечеткий регулятор |
нейросетевой регулятор |
штатный регулятор |
||||||
|
I, о.е. |
fуст, Гц |
Δf, Гц |
t, с |
fуст, Гц |
Δf, Гц |
t, с |
fуст, Гц |
Δf, Гц |
t, с |
|
0,25 |
400 |
2 |
0,781 |
400 |
2 |
0,547 |
400 |
2 |
1,156 |
|
0,5 |
400 |
5 |
0,734 |
400 |
3 |
0,578 |
394 |
9 |
0,937 |
|
0,75 |
400 |
8 |
0,656 |
399 |
3 |
0,591 |
386 |
15 |
1,328 |
|
1 |
399 |
10 |
0,656 |
399 |
5 |
0,561 |
382 |
21 |
0,781 |
Сравнение результатов экспериментов с результатами моделирования процессов регулирования частоты в статических режимах работы [1] показало, что расхождение между экспериментальными данными и результатами моделирования не превышает 10-15 %, что подтверждает достоверность разработанных математических моделей.
Таким образом, результаты экспериментальных исследований показали, что интеллектуальные регуляторы частоты выходного напряжения синхронных генераторов превосходят штатный регулятор по точности, величине максимального отклонения и времени регулирования, что подтверждает перспективность их применения.
Рецензенты:
- Рогинская Любовь Эммануиловна, д.т.н., профессор кафедры «Электромеханика» ФГБОУ ВПО «Уфимский государственный авиационный технический университет Министерства образования и науки РФ», г. Уфа.
- Хайруллин Ирек Ханифович, д.т.н., профессор кафедры «Электромеханика» ФГБОУ ВПО «Уфимский государственный авиационный технический университет Министерства образования и науки РФ», г. Уфа.
Библиографическая ссылка
Гизатуллин Ф.А., Каримов В.И. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВЫХОДНОГО НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА В СОСТАВЕ ЭЛЕКТРОМАШИННОГО ПРЕОБРАЗОВАТЕЛЯ // Современные проблемы науки и образования. 2012. № 2. ;URL: https://science-education.ru/en/article/view?id=5926 (дата обращения: 01.08.2026).