


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
COMBINED CONTROL OF SPRINGING AND DAMPING ELEMENTS OF THE VEHICLE SUSPENSION SYSTEM

Из числа известных вариантов управляемых систем подрессоривания можно выделить полуактивные системы [6], являющиеся наиболее оптимальными с точки зрения повышения плавности хода (преимущество перед пассивными системами подрессоривания), энергопотребления и сложности конструктивного исполнения (преимущество перед активными системами подрессоривания). Под полуактивными системами подрессоривания понимаются такие системы, в которых внешняя энергия расходуется только на изменение параметров, входящих в нее по сути пассивных упругих и демпфирующих элементов, а именно на изменение их упругодемпфирующих свойств.
В данной статье исследовалась эффективность работы системы подрессоривания с комбинированным управлением упругодемпфирующими элементами (ГПР) при движении ТС по случайному микропрофилю. Используемый алгоритм управления демпфирующим элементом ГПР можно представить аналитически следующей системой:
 (1)
(1)
где ![]() ,
, ![]() - вертикальные скорости подрессоренной и неподрессоренной масс,
- вертикальные скорости подрессоренной и неподрессоренной масс, ![]() - текущий коэффициент сопротивления ГПР,
- текущий коэффициент сопротивления ГПР, ![]() ,
, ![]() ,
,![]() - коэффициенты переменного сопротивления ГПР, причем
- коэффициенты переменного сопротивления ГПР, причем ![]() , i - номер ГПР.
, i - номер ГПР.
В качестве закона управления упругим элементом был предложен алгоритм, суть которого заключается в изменении упругодемпфирующих свойств ГПР, посредством коммутации двух объемов газовой полости в зависимости от текущих значений вертикальных скоростей подрессоренной и неподрессоренной масс. Эффективность данного алгоритма была также исследована на модели автобуса с управляемыми упругими элементами низкого давления в виде резинокордных пневматических рессор [3, 4].
Используя уравнение упругой характеристики пассивного гидропневматического элемента [2], можно получить упругую характеристику гидропневматического элемента с изменяемыми упругодемпфирующими свойствами, которая будет рассчитываться по следующей формуле:
 (2)
(2)
где ![]() - упругая сила ГПР,
- упругая сила ГПР, ![]() - начальное избыточное давление в ГПР, k - показатель политропы,
- начальное избыточное давление в ГПР, k - показатель политропы, ![]() - площадь поршня ГПР,
- площадь поршня ГПР, ![]() ,
,![]() - основной и дополнительный объемы газовой полости ГПР,
- основной и дополнительный объемы газовой полости ГПР, ![]() - деформация ГПР, соответствующая моменту подключения/отключения дополнительного объема.
- деформация ГПР, соответствующая моменту подключения/отключения дополнительного объема.
Алгоритм управления пневматическим упругим элементом за счет изменения его рабочего объема можно представить аналитически следующей системой:
 (3)
(3)
где Vi - текущий объем газовой полости i-ой ГПР.
Исследование эффективности работы системы подрессоривания с комбинированным управлением упругими и демпфирующими элементами проводилось с использованием апробированного программного комплекса ФРУНД [1]. Данный программный комплекс использовался при создании автомобиля ЗИЛ 32501, спортивного автомобиля КАМАЗ, легкового автомобиля ВАЗ 2123 и других машин, он также используется при проектировании и доводке различных механических систем в подразделениях ряда отечественных машиностроительных заводов. С помощью данной системы была сформирована пространственная многомассовая модель ТС, общий вид расчетной схемы которой представлен на рисунке 1.
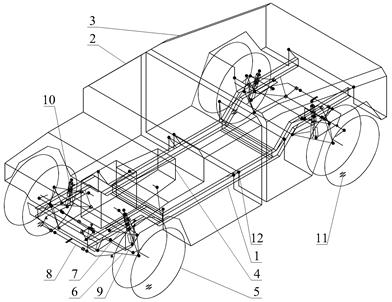
Рис. 1. Общий вид расчетной схемы транспортного средства
ТС представляет собой двухосный автомобиль повышенной проходимости с независимыми передней и задней подвесками, капотной компоновки, колесной формулы 4x4. Модель состоит из абсолютно твердых тел, а именно рамы 1, кабины 2, фургона 3, силового агрегата 4, колес 5, поперечных рычагов 6 и 7, половинок стабилизаторов поперечной устойчивости 8, тяг 9. Твердые тела соединены между собой и дорогой упругими и демпфирующими элементами: гидропневматическими рессорами (ГПР) 10, шинами 11, а также различными кинематическими парами 12. Модель системы подрессоривания точно воспроизводит геометрию передней и задней подвесок реального объекта со всеми степенями свободы и связями.
Для проверки адекватности разработанной математической модели было проведено сопоставление расчетных данных с экспериментальными, полученными в ходе дорожных испытаний ТС с пассивной (неуправляемой) системой подрессоривания. Экспериментальные данные в виде спектральных плотностей и СКЗ вертикальных ускорений кабины на месте сидения водителя были получены в результате замеров при прямолинейном движении по специальной дороге из булыжника удовлетворительного качества, что соответствует дорогам 2-й категории (ОСТ 37.001.275-84 - «Автотранспортные средства. Методы испытаний на плавность хода».) с постоянной скоростью 55 км/ч.
Методика расчетных исследований строилась по аналогии с методикой экспериментальных измерений при дорожных испытаниях. В качестве функции возбуждения была выбрана реализация микропрофиля дороги из булыжника удовлетворительного качества.
На рисунке 2 представлены графики расчетных 1 и экспериментальных 2 спектральных плотностей вертикальных ускорений кабины на месте сидения водителя при прямолинейном движении ТС с пассивной системой подрессоривания по дороге из булыжника удовлетворительного качества с постоянной скоростью 55 км/ч.
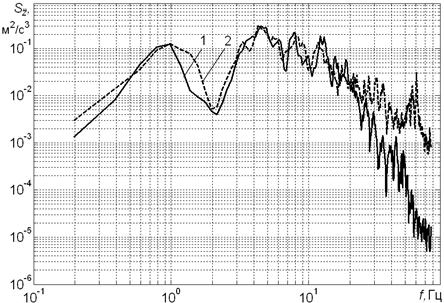
Рис. 2. Расчетные и экспериментальные спектральные плотности вертикальных ускорений кабины ТС на месте сидения водителя:
1 - расчет (СКЗ=1,27 м/с2), 2 - эксперимент (СКЗ=1,37 м/с2)
В таблице 1 представлены экспериментальные и расчетные СКЗ вертикальных ускорений кабины ТС на месте сидения водителя в 1/3 октавных полосах частот.
Таблица 1. Расчетные и экспериментальные СКЗ вертикальных ускорений кабины ТС на месте сидения водителя, м/с2 (1 - расчет, 2 - эксперимент)
|
fг, Гц |
0,80 |
1,00 |
1,25 |
1,60 |
2,00 |
2,50 |
3,15 |
4,00 |
5,00 |
6,30 |
8,00 |
10,00 |
12,50 |
16,00 |
20,00 |
|
1 |
0,144 |
0,154 |
0,091 |
0,043 |
0,041 |
0,064 |
0,203 |
0,384 |
0,434 |
0,380 |
0,459 |
0,316 |
0,556 |
0,350 |
0,318 |
|
2 |
0,133 |
0,157 |
0,136 |
0,091 |
0,046 |
0,086 |
0,239 |
0,371 |
0,432 |
0,397 |
0,463 |
0,377 |
0,478 |
0,316 |
0,300 |
|
δ, % |
8,3 |
1,9 |
33,1 |
52,7 |
10,9 |
25,6 |
15,1 |
3,5 |
0,5 |
4,3 |
0,9 |
16,2 |
16,3 |
10,8 |
6,0 |
|
fг - среднегеометрические частоты, δ = (эксперимент - расчет / эксперимент)·100%. |
|||||||||||||||
Сопоставление графических зависимостей спектральных плотностей вертикальных ускорений, а также СКЗ вертикальных ускорений в 1/3 октавных полосах частот, полученных расчетным и экспериментальным путями, показывает приемлемую сходимость в диапазоне частот 0,7-22,4 Гц для рассматриваемого режима движения ТС. Среднее отклонение расчетных ускорений от экспериментальных не превышает 15%, что для случайного характера процесса вполне допустимо. Исходя из этого, можно заключить, что пространственная многомассовая модель ТС удовлетворяет требованиям адекватности реальному объекту и может быть использована для дальнейших расчетов.
Далее было проведено моделирование движения ТС, оснащенного системой подрессоривания с комбинированным управлением ГПР, при аналогичных условиях движения. Результаты моделирование изображены на рисунке 3 и сведены в таблицу 2.
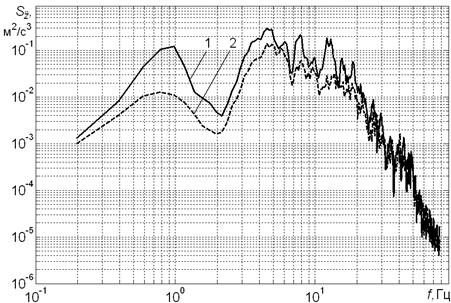
Рис. 3. Расчетные спектральные плотности вертикальных ускорений кабины ТС на месте сидения водителя:
1 - пассивная система подрессоривания (СКЗ=1,27 м/с2), 2 - управляемая система подрессоривания (СКЗ=0,81 м/с2)
Таблица 2. Расчетные СКЗ вертикальных ускорений кабины ТС на месте сидения водителя, м/с2 (1 - пассивная система подрессоривания, 2 - управляемая система подрессоривания)
|
fг, Гц |
0,80 |
1,00 |
1,25 |
1,60 |
2,00 |
2,50 |
3,15 |
4,00 |
5,00 |
6,30 |
8,00 |
10,00 |
12,50 |
16,00 |
20,00 |
|
1 |
0,144 |
0,154 |
0,091 |
0,043 |
0,041 |
0,064 |
0,203 |
0,384 |
0,434 |
0,380 |
0,459 |
0,316 |
0,556 |
0,350 |
0,318 |
|
2 |
0,050 |
0,046 |
0,038 |
0,022 |
0,026 |
0,043 |
0,125 |
0,243 |
0,326 |
0,307 |
0,258 |
0,236 |
0,253 |
0,245 |
0,203 |
|
65,3 |
70,1 |
58,2 |
48,8 |
36,6 |
32,8 |
38,4 |
38,0 |
24,9 |
19,2 |
43,8 |
25,3 |
54,5 |
30,0 |
36,2 |
|
|
δ = (пассивная-управляемая/пассивная)·100%. |
|||||||||||||||
Из анализа результатов моделирования можно констатировать значительное повышение плавности хода ТС, оснащенного управляемой системой подрессоривания. Снижение вертикальных ускорений кабины на месте сидения водителя для рассмотренного режима движения составило в среднем 40 %, что для данного класса управляемых систем подрессоривания является в принципе предельным значением.
Подводя итоги можно отметить, что система подрессоривания с комбинированным управлением упругими и демпфирующими элементами являются весьма эффективной с точки зрения снижения динамической нагруженности подрессоренных частей ТС, что в совокупности с низким энергопотреблением делает ее весьма конкурентоспособной. Представленные в работе результаты исследования и законы управления упругими и демпфирующими элементами могут служить основой для создания конструктивно относительно простых управляемых систем подрессоривания.
Рецензенты:
- Герасун В.М., д.т.н., профессор, зав. кафедрой «Сопротивление материалов и детали машин» Волгоградской государственной сельскохозяйственной академии, г. Волгоград.
- Новиков В.В., д.т.н., профессор, заместитель директора по учебной работе НОУ СПО «Волгоградский колледж газа и нефти» ОАО «Газпром», г. Волгоград.
Работа получена 09.08.2011.
Библиографическая ссылка
Подзоров А.В. КОМБИНИРОВАННОЕ УПРАВЛЕНИЕ УПРУГИМИ И ДЕМПФИРУЮЩИМИ ЭЛЕМЕНТАМИ СИСТЕМЫ ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА // Современные проблемы науки и образования. 2011. № 4. ;URL: https://science-education.ru/en/article/view?id=4730 (дата обращения: 16.07.2026).