


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
LEARNING CURVE FOR ROBOT-ASSISTED HIP REPLACEMENT IN DYSPLASIA

Введение
Современная ортопедическая хирургия характеризуется активным внедрением инновационных технологий, среди которых особое место занимает робот-ассистированное тотальное эндопротезирование тазобедренного сустава (раТЭТС), в сравнении с традиционными мануальными методиками (ммТЭТС). Интенсивное развитие роботических технологий в эндопротезировании наблюдается во всем мире.
Роботические системы обеспечивают возможность детального индивидуального предоперационного планирования, что критически важно для достижения оптимального позиционирования компонентов эндопротеза [1-3]. Современные роботические платформы демонстрируют исключительную точность имплантации, достигая погрешности не более 1 мм по позиции и 1 градуса по углу наклона для каждого конкретного пациента [4-6]. Особую клиническую значимость робот-ассистированные технологии приобретают при эндопротезировании тазобедренного сустава у пациентов с дисплазией вертлужной впадины. В таких случаях хирург сталкивается с выраженным дефицитом кости, что существенно затрудняет адекватное размещение вертлужного компонента и обеспечение корректного функционирования искусственного сустава [7]. Система MAKO robot позволяет минимизировать ошибки ориентации компонентов, повысить хирургическую точность и снизить вероятность интраоперационных и послеоперационных осложнений, таких как снос краев впадины, проваливания в таз во время фрезировки впадины, мальпозиции компонентов протеза и его вывих.
Lu H. и соавторы провели комплексное исследование, направленное на оценку кривой обучения новой семиосевой системы робот-ассистированного тотального эндопротезирования тазобедренного сустава (раТЭТС). В рамках проспективного рандомизированного контролируемого исследования была проанализирована выборка из 59 пациентов, перенесших одностороннее тотальное эндопротезирование тазобедренного сустава в период с июня по сентябрь 2022 года. Методологический подход включал применение CUSUM-анализа (cumulative sum) для точной оценки кривой обучения системы раТЭТС с параллельным сравнением робот-ассистированной раТЭТС и традиционной мануальной ммТЭТС хирургических техник. Результаты исследования продемонстрировали, что кривая обучения составляет 13 клинических случаев для достижения профессионального уровня владения технологией. Временные характеристики хирургических вмешательств показали, что средняя продолжительность операции в группе раТЭТС превышала аналогичный показатель группы ммТЭТС на 34,73 минуты (104,26±19,33 против 69,53±18,38 мин., p<0,01). Однако достижение стадии профессионализма сопровождалось значительным сокращением операционного времени на 29,75 минуты по сравнению со стадией обучения (121,12±12,84 против 91,37±12,92, p<0,01). Качество позиционирования компонентов в группе раТЭТС характеризовалось тем, что 96,7% (29/30) чашек были установлены в пределах безопасной зоны Лёвиннека, тогда как при мануальной технике этот показатель составил 82,76% (24/29) [8].
Дополнительные исследования других авторов подтверждают эффективность роботических технологий. Guo D. и соавторы [9] продемонстрировали преимущества точного позиционирования чашки при робот-ассистированном эндопротезировании. Zhang L. и соавторы [10] в ретроспективном исследовании «случай - контроль» выявили особые преимущества робот-ассистированных технологий у пациентов с ожирением. Singh V. и соавторы [11] провели сравнительный анализ результатов робототехники, навигационных систем и традиционного эндопротезирования. Kolodychuk N. и соавторы [12] изучали потенциал робототехники в смягчении кривой обучения тотального эндопротезирования тазобедренного сустава.
Технологический процесс робот-ассистированного тотального эндопротезирования представляет собой комплексную систему, включающую выполнение компьютерной томографии по специализированному протоколу, сегментацию полученных изображений, детальное планирование всех компонентов эндопротеза, интраоперационную навигацию, визуализацию и функционирование ассистированной роботической руки [13]. Такой интегрированный подход обеспечивает достижение высокой точности имплантации компонентов эндопротеза при одновременном снижении травматичности и продолжительности оперативного вмешательства, позволяя достигать выравнивания длины конечности до 1 мм относительно контралатеральной стороны [14; 15].
Цели настоящего клинического исследования:
№ 1 - проведение сравнительного анализа постановки имплантов и временных параметров хирургических вмешательств между двумя методиками (раТЭТС и ммТЭТС);
№ 2 – изучение кривой обучаемости хирургов при освоении робот-ассистированного эндопротезирования тазобедренного сустава.
Методы и материалы исследования
Клиническое исследование проводилось на базе Юсуповской больницы (г. Москва) в период с февраля 2024 г. по июнь 2025 г. Исследовательская группа включала 200 пациентов, разделенных на две равные когорты по 100 человек в каждой, пациенты обоих полов, у кого был диспластический коксартроз до 3 ст. по Crowe. Средний возраст пациентов 52,4 ± 8,7 года (18–65 лет). Первая группа пациентов подвергалась мануальному тотальному эндопротезированию тазобедренного сустава (ммТЭТС), вторая группа оперировалась с применением робот-ассистированной технологии (раТЭТС) с использованием хирургической системы MAKO Robot.
5 хирургов выполняли по 20 оперативных вмешательств раТЭТС. В каждом случае была задействованы одна и та же группа ассистирующих хирургов, анестезиологов и медсестер и один и тот же представитель отрасли (MPS - Mako Product Specialist). Время операции не включало время выполнения спинальной анестезии. Оно измерялось для обеих методик от первого разреза кожи до закрытия раны. Первый разрез для группы раТЭТС считался не с момента установки антенн, а с момента выполнения основного кожного доступа.
Все пациенты в предоперационном периоде получили детальную информацию об особенностях предстоящих хирургических процедур и предоставили письменные согласия на использование персональных медицинских данных в научных целях.
Методология исследования предусматривала оценку точности позиционирования ацетабулярных компонентов в соответствии с критериями безопасных зон Левиннека и Калланана (с помощью рентгена и компьютерной томографии тазобедренного сустава и тазовых костей), анализ временных характеристик операций, измерение объема интраоперационной кровопотери, а также изучение кривой обучаемости хирургов при освоении робот-ассистированной технологии.
Статистическая обработка данных исследования проводилась с использованием t-критерия Стьюдента для параметрических данных, подсчитывалась статистическая значимость между количественными величинами изучаемых показателей приp < 0,05. Статистическая значимость для несвязанных выборок определялась непараметрическими методами (U-критерий Манна – Уитни).
Результаты исследования и их обсуждение
Анализ точности позиционирования ацетабулярных компонентов продемонстрировал существенные преимущества робот-ассистированного тотального эндопротезирования тазобедренного сустава перед мануальной техникой. При оценке попадания в безопасную зону Левиннека группа раТЭТС показала абсолютную точность с результатом 100% (50 из 50 случаев), в то время как в группе ммТЭТС этот показатель составил 80% (40 из 50 случаев). Статистический анализ с использованием критерия хи-квадрат подтвердил высокую статистическую значимость различий между группами (χ² = 11,11; p<0,001) (рис. 1).
Рис. 1. Точность позиционирования ацетабулярных компонентов после раТЭТС (n=50) и ммТЭТС (n=50)
Примечание: составлено авторами на основе полученных данных в ходе исследования.
Аналогичная тенденция наблюдалась при анализе попадания в безопасную зону Калланана, где группа раТЭТС достигла результата 92% (46 из 50 операций) против 62% (31 из 50) в группе ммТЭТС, что также показало статистически значимое различие (χ² = 12,77; p < 0,001). Особенно показательным стал анализ комбинированного попадания в обе безопасные зоны одновременно, где робот-ассистированная техника обеспечила точность в 77% случаев (77 из 100 операций) по сравнению с 45% (45 из 100) при мануальной технике. Применение U-критерия Манна - Уитни подтвердило высокую статистическую значимость этого различия (U = 3127,5; p < 0,001).
Временные характеристики операций выявили интересную динамику, связанную с кривой обучаемости робот-ассистированной техники. При анализе общей продолжительности операций средние значения составили 89,3±15,7 минуты для раТЭТС против 92,4±18,2 минуты для ммТЭТС, что не показало статистически значимых различий (t = 1,28; p = 0,203). Однако детальный анализ кривой обучаемости продемонстрировал характерную динамику освоения новой технологии. В период освоения техники, включавший первые 6 операций, продолжительность вмешательств в группе раТЭТС составила 112,8±22,1 минуты, что значительно превышало показатели группы ммТЭТС (t = 3,45; p<0,01). После преодоления кривой обучаемости, начиная с 7-й по 20-ю операцию, ситуация кардинально изменилась: время операций в группе раТЭТС сократилось до 78,9±12,3 минуты, что оказалось существенно меньше показателей группы ммТЭТС (t = 4,12; p < 0,001) (рис. 2).
Рис. 2. Временные показатели операций, мин.
Примечание: составлено авторами на основе полученных данных в ходе исследования.
Объем интраоперационной кровопотери продемонстрировал значительные преимущества робот-ассистированной техники. Средние значения кровопотери составили 185,4 ± 67,8 мл в группе раТЭТС против 267,3 ± 89,6 мл в группе ммТЭТС, что представляет статистически значимое высокое различие согласно t-критерию Стьюдента (t = 7,23; p < 0,001). Оценка соответствия критериям Fast-track протокола показала существенное превосходство робот-ассистированной методики. Средний балл в группе раТЭТС составил 8,4 ± 1,2 против 5,6 ± 1,8 балла в группе ммТЭТС, что соответствует различию в 50% и демонстрирует высокую статистическую значимость (t = 12,47; p < 0,001). Продолжительность госпитализации также оказалась значительно меньше при использовании робот-ассистированной техники. Пациенты группы раТЭТС находились в стационаре в среднем 3,2 ± 0,8 дня, в то время как в группе ммТЭТС этот показатель составил 4,7 ± 1,3 дня. Применение U-критерия Манна - Уитни подтвердило статистическую значимость различий (U = 2834,0; p < 0,001) (табл. 1).
Таблица 1
Сравнение интраоперационных и послеоперационных показателей в группах раТЭТС и ммТЭТС
|
Показатель |
Группа раТЭТС (n=50) |
Группа ммТЭТС (n=50) |
p-значение |
|
Интраоперационные |
|||
|
Кровопотеря, мл (M±SD) |
185,4 ± 67,8 |
267,3 ± 89,6 |
<0,001* |
|
Послеоперационные |
|||
|
Fast-track балл (M±SD) |
8,4 ± 1,2 |
5,6 ± 1,8 |
<0,001* |
|
Госпитализация, дни (M±SD) |
3,2 ± 0,8 |
4,7 ± 1,3 |
<0,001* |
|
Отклонение длины конечности, мм (M±SD) |
0,8 ± 0,4 |
3,2 ± 2,1 |
<0,001* |
|
Forgotten Joint Score (12 мес., M±SD) |
84,7 ± 8,3 |
78,2 ± 12,1 |
<0,001* |
Анализ послеоперационных осложнений выявил более низкую частоту неблагоприятных исходов в группе раТЭТС. Частота вывихов эндопротеза через 12 месяцев наблюдения составила 1% (1 из 100 случаев) в группе раТЭТС против 4% (4 из 100) в группе ммТЭТС, однако это различие не достигло статистической значимости согласно точному критерию Фишера (p=0,371). Существенно более показательными оказались данные по мальпозиции компонентов эндопротеза: в группе раТЭТС не было зарегистрировано ни одного случая мальпозиции (0%), в то время как в группе ммТЭТС этот показатель составил 8% (8 из 100 операций), что представляет статистически значимое различие (p<0,01). Точность восстановления длины конечности продемонстрировала выраженные преимущества робот-ассистированной техники. Среднее отклонение от контралатеральной стороны в группе раТЭТС составило всего 0,8 ± 0,4 мм по сравнению с 3,2 ± 2,1 мм в группе ммТЭТС, что показало высокую статистическую значимость различий (t=11,89; p<0,001). Функциональные результаты, оцененные по шкале Forgotten Joint Score через 12 месяцев после операции, также продемонстрировали преимущества робот-ассистированной методики. Средний балл в группе раТЭТС составил 84,7 ± 8,3 против 78,2 ± 12,1 в группе ммТЭТС, что соответствует статистически значимому различию (t = 4,25; p < 0,001).
Сопоставимые результаты были получены при оценке позиционирования в безопасной зоне Калланана. Робот-ассистированная методика обеспечила корректное размещение 92% эндопротезов, тогда как мануальная техника достигла этого показателя лишь в 62% случаев. Детальный анализ частоты размещения ацетабулярного компонента в безопасной зоне Левиннека выявил превосходство робот-ассистированной технологии. В когорте раТЭТС этот показатель составил 77%, существенно превышая результат мануальной методики, который составил 45%. Данные различия наглядно демонстрируются на рисунке 3.
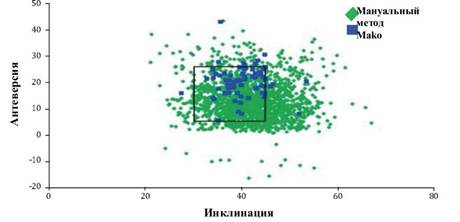
Рис. 3. Сравнение ориентации ацетабулярного компонента с использованием раТЭТС Mako (100 пац.) и ммТЭТС (100 пац.)
Примечание: составлено авторами на основе полученных данных в ходе исследования.
Пациенты, оперированные с применением робот-ассистированной технологии, демонстрировали улучшенные краткосрочные результаты лечения и достигали наивысших оценок по шкале Forgotten Joint Score [16]. Также у пациентов, перенесших раТЭТС, показатели Fast-track были на 50% выше, чем у пациентов, которым было выполнено ммТЭТС, это приводило к сокращению продолжительности госпитализации в стационаре и достижению точного выравнивания длины конечности относительно здоровой стороны. Представленные в таблице 2 данные подтверждают превосходство раТЭТС в отношении точности абдукции (AAB) и антеверсии (AAV) ацетабулярной чашки. Годичное наблюдение показало более низкую частоту вывихов в группе раТЭТС по сравнению с мануальной техникой. Средняя расчетная кровопотеря также оказалась значительно меньше у пациентов, получавших робот-ассистированное лечение.
Таблица 2
Послеоперационные результаты у пациентов, прооперированных ммТЭТС,
 |
по сравнению с методом раТЭТС
Примечание: составлено авторами на основе полученных данных в ходе исследования.
Анализ кривой обучаемости 5 хирургов продемонстрировал обнадеживающие результаты освоения роботической технологии. На начальном этапе продолжительность операций с применением робота превышала время мануальных вмешательств на 20-30 минут. Однако к 6-7-й операции временные характеристики сравнялись с показателями ммТЭТС, а в ряде случаев раТЭТС выполнялись быстрее чем ммТЭТС, что отражено на рисунке 4.
Рис. 4. Кривая обучаемости ТЭТС
Примечание: составлено авторами на основе полученных данных в ходе исследования.
Проведенное исследование позволяет выделить успешность раТЭТС перед ммТЭТС. К преимуществам относятся:
- снижение длительности операции при использовании раТЭТС;
- уменьшение объема интраоперационной кровопотери;
- обеспечение индивидуальной имплантации всех компонентов эндопротеза с учетом анатомических особенностей пациента;
- достижение точного выравнивания длины конечности относительно контралатеральной стороны.
Заключение
Сравнительный анализ операции с применением робота и традиционного мануального метода убедительно демонстрирует преимущества робот-ассистированного эндопротезирования тазобедренного сустава у пациентов с диспластическим коксартрозом. Применение раТЭТС обеспечивает повышение скорости операции после освоения методики, значительное улучшение точности установки имплантов, сокращение продолжительности и травматичности хирургического вмешательства, минимизацию интраоперационной кровопотери и ускорение восстановительного периода. Полученные результаты свидетельствуют о целесообразности внедрения робот-ассистированных технологий в клиническую практику ортопедической хирургии, особенно при работе с пациентами, имеющими сложные анатомические особенности тазобедренного сустава.
Conflict of interest
Библиографическая ссылка
Дгебуадзе Г.-., Грицюк А.А., Шумский А.А., Мацакян А.М. КРИВАЯ ОБУЧАЕМОСТИ РОБОТ-АССИСТИРОВАННОГО ЭНДОПРОТЕЗИРОВАНИЯ ТАЗОБЕДРЕННОГО СУСТАВА ПРИ ДИСПЛАЗИИ // Современные проблемы науки и образования. 2025. № 4. ;URL: https://science-education.ru/en/article/view?id=34183 (дата обращения: 24.07.2026).
DOI: https://doi.org/10.17513/spno.34183