


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
IMPROVEMENT OF METHODS OF SATELLITE IMAGE INTERPRETATION LARGE LAKES IN «WATER»-«ICE»CLASSES

Цель исследований–разработка алгоритма попиксельной классификации космических снимков Ладожского и Онежского озер для расчета коэффициента ледовитости в целях дальнейшего исследования многолетней изменчивости ледового режима больших озер.
Материалы и методы
Для исследований ледового режима Онежского и Ладожского озер за период 2007-2015 гг. использованы данные дистанционных наблюдений современных спутников NOAA и спутников Modis: Terra и Aqua.
Снимки спутников Terra и Aqua выполнены в видимом диапазоне с пространственным разрешением (250 м/пиксель) и предоставлены центром LANCE RapidResponse MODIS images в виде синтезированных RGB-изображений в естественном цвете (truecolor: каналы 1, 4, 3) [8]. Наблюдения в данном формате снимков ведутся с 1-ого января 2007 года и по настоящее время. Период выполнения снимков – сутки.
Для перехода от изображения космической съемки территории к количественной оценке ледовой обстановки водного объекта необходимо осуществить дешифрирование снимка для классификации интересующих объектов, изображенных на нем. И в дальнейшем необходимо установить количественные показатели выделенных объектов, в частности, площадные характеристики.
Дешифрирование снимков осуществляется с помощью современных методов, реализованных в алгоритмах для ЭВМ. Для автоматизированного разделения всех пикселей полученных космических снимков на группы, соответствующие разным объектам (классам: «вода», «лед», «земля») использован наиболее распространенный метод в классификации – использование спектральных признаков, то есть на основе различий в спектральной яркости [4, 5].
Для автоматизированного исследования Онежского озера, а также Ладожского озера необходимо выделять класс самого исследуемого объекта. Сложность данной процедуры заключается в нестандартной классификации объектов снимка. В данном случае классифицируются не объекты классов «вода» – «лед» или «вода» – «земля», а объект акватории самих озер (Ладожского и Онежского) от остальных водных объектов района изображенного на снимке.
Для этого разработан и использован автоматизированный алгоритм, который включает в себя комбинированную классификацию методами различий спектральных яркостей и методов «наводнения» и «правой руки» по окрестности Фон Неймана [4, 5] (взаимное расположение определенных классов объектов или их частей в пределах площади всего изображения). Блок-схема алгоритма представлена на рис. 1.
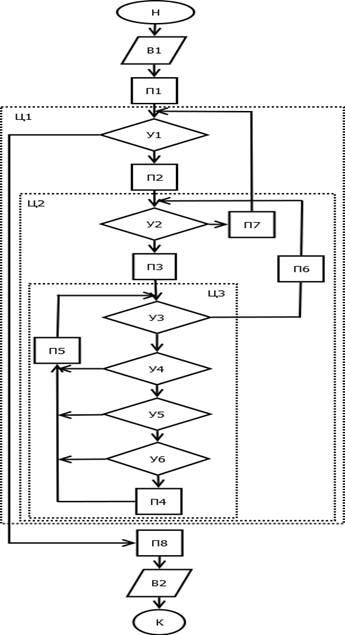
Рис. 1. Блок-схема алгоритма для классификации объекта водоема
В начале работы алгоритма с помощью оператора В1 осуществляется загрузка рабочего изображения (снимка с изображением Ладожского или Онежского озера), осуществляется выбор и ввод контрольных точек на изображении. Координаты точек соответствуют номерам пикселей, начиная от левого верхнего угла по горизонтальной и вертикальной осям. Вводится точка «начала затопления» для водоема controlPoint, точки, характеризующих класс «вода», для получения эталонных значений спектральных яркостей controlColors. Далее исполнение передается оператору П1. Этот оператор инициализирует в оперативной памяти компьютера 4 динамических массива точек: points0, points1, points2, points3, а также помещает контрольную точку controlPoint в массив points2.
Исполнение передается оператору У1, который проверяет условие выхода из цикла Ц1: содержит ли массив точек points2 хотя бы одну точку. В случае, если условие выполняется, осуществляется вход в цикл Ц1 и исполнение передается оператору П2.
Оператор П2 инициализирует переменную i=0 для индексации массива points2, и передает исполнение оператору У2, который проверяет условие выхода из цикла Ц2: i<points2.Lenght, то есть меньше ли значение i, чем количество точек в массиве points2. Если это условие выполняется, то осуществляется вход в цикл Ц2, где последовательно перебираются точки массива points2. Исполнение передается оператору П3, который инициализирует новый массив точек aroundPoints, состоящий из четырех смежных точек для точки points2[i], как представлено на рис. 2: две смежные точки по оси Y, и две смежные точки по оси X.
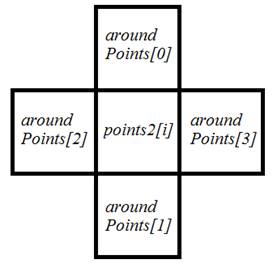
Рис. 2. Схема расположения точек, соответствующим координатам пикселей на изображении
После оператор П3 инициализирует переменную j=0, которая служит индексом для массива aroundPoints, и осуществляет вход в следующий цикл Ц3.
Исполнение передается оператору У3, который проверяет условие выхода из цикла – не превышает ли значение jколичество точек в массиве aroundPoints. Если это условие выполняется, то исполнение переходит к оператору У4, который проверяет условие – попадает ли пиксель с координатами точки aroundPoints[j] на изображении снимка. Если это условие выполняется, то исполнение передается оператору У5, который проверяет следующие условие – содержат ли динамические массивы points1, points2, points3 точку с такими же координатами как и точка aroundPoints[j]. Если это условие выполняется, то исполнение передается оператору У6, который проверяет условие – не превышает ли критическое значение разница между значениями интенсивности зеленой, синей и красной составляющих эталонных цветов controlColors и цвета пикселя изображения с координатами точки aroundPoints[j]. В случае если это условие выполнено, то оператор П5 добавляет точку aroundPoints[j] в массив points3. Далее действие передается оператору П5, который увеличивает индекс j на единицу, то есть переходит кследующей точки массива aroundPoints, исполнение опять передается оператору У3.
Невыполнение условий У4, У5, У6 приводит к передачи исполнения оператору П5.
Если все точки массива aroundPoints прошли последовательный перебор, то есть условие У3 больше не выполняется и осуществляется выход из цикла Ц2, то исполнение отдается оператору П6, который увеличивает индекс iна единицу, то есть переходит к следующей точки массива points2 и передает управление оператору У2.
В случае, если условие оператора У2 не выполняется, то есть все точки массива points2 перебраны, то выполнение передается оператору П7, который добавляет в массив points0 все точки массива points1, удаляет из массива points1 все точки, затем добавляет все точки массива points2 в массивpoints1 и удаляет все точки из массива points2, и наконец, добавляет в массивpoints2 все точки массиваpoints3, удаляет все точки массиваpoints3.
В случае, если на момент проверки условия оператора У1, массив points2 не имеет точек, то происходит выход из цикла Ц1 и исполнение передается оператору П8. Оператор П8 добавляет в массив points0 все точки массива points1 и передает исполнение оператору В2, который выводит в дальнейшее использование массив точек points0, который описывает искомый водный объект на снимке с указанной точки «начала наводнения».
В результате работы описанного алгоритма получены контуры береговой линии Онежского и Ладожского озер, представляющие границы исследуемых объектов. В качестве исходного изображения использован снимок максимально чистый от облачности для получения максимально точного результата, имеющий только бинарную структуру объектов «земля» – «вода».
Каждой точки контуров, а также классифицированных объектов «Онежское озеро» и «Ладожское озеро» присвоены и сохранены координаты для возможности автоматизирования процессов дешифрирования. В дальнейшем, классификация всех последующих снимков спутников Terra и Aqua осуществлена в пределах полученного контура.Для классификации объектов «вода» – «лед» Ладожского озера в работах Каретникова С. Г. и Науменко М. С. [6, 7] использовался метод разбиения классифицируемой области сеткой. Пространственный шаг выбранной сетки – 10 км, что дает погрешность при классификации порядка 10 %.При классификации Онежского озера на объекты «вода» - «лед» нами использован подобный метод, применявшийся для классификации Ладожского озера. Основным отличием метода является выбор сетки с пространственным шагом, равным пространственному разрешению космического снимка, 250 метров. Такое применение имеет недостаток по сравнению с вышеописанным в работах [3, 4] большим объемом выполняемых компьютерных операций по классификации объектов. Время процесса классификации даже на современных ЭВМ, таким образом, может быть увеличено в сотни раз. Однако погрешность используемого метода составляет менее одного процента, т.е. существенно лучше, чем в работах [6, 7]. Необходимость, вызывающая использование данного алгоритма, заключается в более сложной форме акватории Онежского озера, обусловленной наличием многочисленных заливов и губ, по сравнению с Ладожским озером[1, 2].
Пример классификации изображения методом различий спектральной яркости на объекты «вода» – «лед» попиксельно, чем определена область ледового покрова, представлены на рис. 3-4.

Рис. 3. Снимок Онежского озера спутником Terra в видимом диапазоне на 29.03.2008 с классифицированным изображением по объектам «вода» – «лед».

Рис. 4. Снимок Ладожского озера спутником Terra в видимом диапазоне на 24.03.2007 с классифицированным изображением по объектам «вода» – «лед».
На снимках спутников Terra и Aqua с попиксельным использованием метода разности спектрального анализа объект «Онежское озеро» состоит из 157714 пикселей, что обеспечивает градацию расчетной ледовитости: 0,0006 %. Объект «Ладожское озеро» состоит из 280479 пикселей, что обеспечивает градацию расчетной ледовитости: 0,0003 %.
Работа выполнена при финансовой поддержке гранта РНФ 14-17-00740 «Озера России – диагноз и прогноз состояния экосистем при климатических и антропогенных воздействиях»
Заключение
Получен алгоритм автоматизированного дешифрирования космических снимков больших озер (Онежского и Ладожского), с помощью которого имеется возможность определять коэффициент ледовитости, причем точность расчета гораздо выше, чем у предшествующих способов. Особенностью алгоритма является то, что перед классификацией пикселей на классы «лед»-«вода», выделяется класс самого исследуемого водного объекта от остальных водных объектов изображенных на космическом снимке, без чего не возможно рассчитать площадные характеристики исследуемого озера, необходимые для расчета коэффициента ледовитости. Данный алгоритм будет применяться для построения временных рядов ледовитости Онежского и Ладожского озера, характеризующих многолетнюю изменчивость ледового режима этих озер.
Рецензенты:Филатов Н.Н., д.геогр.н., зав. лабораторией географии и гидрологии ИВПС КарНЦ РАН,г. Петрозаводск;
Карпечко Ю.В., д.геогр.н., ведущий научный сотрудник лаборатории географии и гидрологии ИВПС КарНЦ РАН, Петрозаводск.
Библиографическая ссылка
Баклагин В.Н. СОВЕРШЕНСТВОВАНИЕ МЕТОДА ДЕШИФРИРОВАНИЯ КОСМИЧЕСКИХ СНИМКОВ БОЛЬШИХ ОЗЕР НА КЛАССЫ «ВОДА»-«ЛЕД» // Современные проблемы науки и образования. 2015. № 2-3. ;URL: https://science-education.ru/en/article/view?id=23900 (дата обращения: 28.07.2026).