


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
SIMULATION MODEL OF SYSTEM OPERATION THE TECHNOLOGICAL EQUIPMENT OF THE LAUNCH COMPLEX

Математическое моделирование является основным методом исследования во многих областях знаний и научно обоснованным методом получения оценок характеристик сложных систем, используемых для принятия решений в инженерной деятельности. [1]. Существующие и проектируемые системы можно эффективно исследовать с помощью математических моделей, реализуемых на современных ЭВМ, которые в этом случае выступают в качестве инструмента экспериментатора с моделью системы.
Наиболее полное исследование процесса функционирования системы можно провести, если известны явные зависимости, связывающие искомые характеристики с начальными условиями, параметрами и переменными системы. Однако такие зависимости удается получить только для сравнительно простых систем. При усложнении систем исследование их аналитическим методом наталкивается на значительные трудности, которые часто бывают непреодолимыми. Поэтому, желая использовать аналитический метод, в этом случае идут на существенное упрощение первоначальной модели, чтобы иметь возможность изучить хотя бы общие свойства системы. Такое исследование на упрощенной модели аналитическим методом помогает получить ориентировочные результаты для определения более точных оценок другими методами. Численный метод, по сравнению с аналитическим, позволяет исследовать более широкий класс систем, но при этом полученные решения носят частный характер.
Зачастую единственным практически применимым методом исследования сложных систем является имитационное моделирование, заключающееся в выполнении многократных машинных прогонов модели с различными исходными данными с целью сбора, накопления и последующей обработки статистических данных, характеризующих ее работу. При имитационном моделировании процесс функционирования системы воспроизводится по времени, причем имитируются элементарные явления, составляющие процесс, с сохранением их логической структуры и последовательности протекания во времени, что позволяет по исходным данным получить сведения о состояниях процесса в определенные моменты времени, дающие возможность оценить характеристики системы. Имитационные модели позволяют достаточно просто учитывать такие факторы, как наличие дискретных и непрерывных элементов, нелинейные характеристики системы, многочисленные случайные воздействия и другие.
Для таких сложных систем, как система эксплуатации (СЭ) технологического оборудования ракетно-космических комплексов (ТлОб РКК), установление связей или, другими словами, зависимостей показателей от характеристик является исключительно сложной задачей так, как ТлОб представляет собой совокупность уникальных или мало серийных агрегатов и систем, натурные испытания которых проводятся в ограниченном объеме или не проводятся совсем. Эти особенности обуславливают выбор в качестве инструмента исследования процесса эксплуатации ТлОб методов имитационного математического моделирования [5].
Эксплуатируемое ТлОб СК представляет собой совокупность стационарных и подвижных технических средств, предназначенных для обеспечения готовности, подготовки и запуска ракеты космического назначения (РКН)и имеет сложную иерархическую структуру [3].
Под СЭ ТлОб СК будем понимать систему управления техническим состоянием оборудования, предназначенную для обеспечения требуемых значений показателей качества функционирования ТлОб и реализующую ряд управляющих воздействий – ремонтно-профилактические работы, ремонтные работы и техническое обслуживание ТлОб.
Всю совокупность ТлОб подготовки и запуска РКН целесообразно представить в виде многоуровневой иерархической структуры, содержащей виды систем ТлОб, системы ТлОб и элементы систем ТлОб (рисунок 1).Где элементом является неделимое, в рамках данного рассмотрения техническое устройство, к обслуживанию которого может быть применен индивидуальный подход (стратегия). Для ТлОб СК предлагается выделить два таких подхода –календарный способ обслуживания («жесткая» стратегия) и обслуживание по техническому состоянию («гибкая» стратегия). Отметим, что в общем случае таких стратегий может быть несколько.
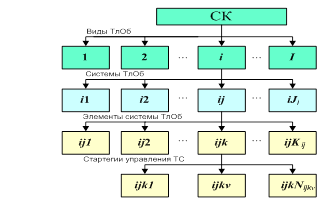
Рисунок 1 – Общая структура ТлОб СК.
Управление техническим состоянием элементом системы ТлОб одновременно может осуществляться только с помощью одной стратегии управления техническим состоянием. На основании представления о СК как о иерархической структуре введем следующие обозначения:
I – множество видов технологического оборудования СК (наземное стартовое оборудование, наземное заправочное оборудование, оборудование систем газоснабжения и термостатирования и т.д.);
J‹i› – множество систем технологического оборудования в i-го вида;
K‹ij› – множество элементов, входящих в j-ю систему i-го вида технологического оборудования СК;
n ‹ijk› – множество стратегий управления техническим состоянием k-го элемента j-ой системы i-го вида технологического оборудования СК;
В качестве показателя качества функционирования СЭ ТлОб СК выберем обеспечиваемый ею коэффициент готовности всего стартового комплекса, который будет зависеть от значений коэффициентов готовности отдельных элементов систем ТлОб и стратегий управления их техническим состоянием:
![]() (1)
(1)
Структура модели СЭ элемента системы ТлОб представляет собой совокупность нескольких взаимосвязанных сегментов, количество и логика работы которых определена используемой стратегией управления техническим состоянием элемента.
Каждый сегмент состоит из обслуживающих устройств - взаимосвязанных в соответствии с логикой работы модели блоков, представляющих собой подпрограммы обслуживания транзактов - событий, возникающих в процессе функционирования СЭ и изменяющих состояние ее элементов. Транзакты являются абстрактными подвижными элементами, которые являются аналогами событий реальных систем.
Моделируемый процесс представляется в виде потока событий, который, в общем случае, рассматривается как случайный процесс и характеризуется законами распределения периода наступления событий. В модели рассматриваются два класса событий:
- основные (события, время наступления которых определяется фиксированными значениями или вероятностными характеристиками времени их наступления, заданными в модели). Под такими событиями будем понимать переход в состояние скрытого отказа элементов систем ТлОб, переход элементов систем ТлОб в предотказное состояние, техническое обслуживание (ТО) и мероприятия контроля технического состояния.
- вспомогательные (события, которые происходят вследствие появления основных событий). Под такими событиями будем понимать ремонтно-профилактические (РПР) и ремонтно-восстановительные работы (РВР), являющиеся следствием отказа или перехода элемента системы ТлОб в предотказное состояние. Вспомогательные события происходят в результате взаимодействия таких абстрактных элементов как блоки и транзакты, например, смена состояния обслуживающего устройства с «занято» (выполняется ТО элемента системы ТлОб) на «свободно» (операции ТО выполнены и элемент готов к применению по назначению) [2].
В качестве примера приведем модель СЭ ТлОб, реализующую «жесткую» стратегию обслуживания оборудования. Схема алгоритма функционирования сегментов имитационной модели представлена на рисунке 2.
Модель элемента, схема которой представлена на рисунке 2, соответствует СЭ, в которой для управления техническим состоянием ТлОб осуществляется с использованием «жесткой» стратегии и состоит из 3 сегментов:
- сегмента имитации перехода элемента системы ТлОб в состояние скрытого отказа и восстановления;
- сегмента имитации периодических проверок элемента системы ТлОб и отказов, возникающих в процессе проведения этих проверок;
- сегмента контроля числа реализаций процесса функционирования СЭ, останова моделирования, расчета и вывода результатов.
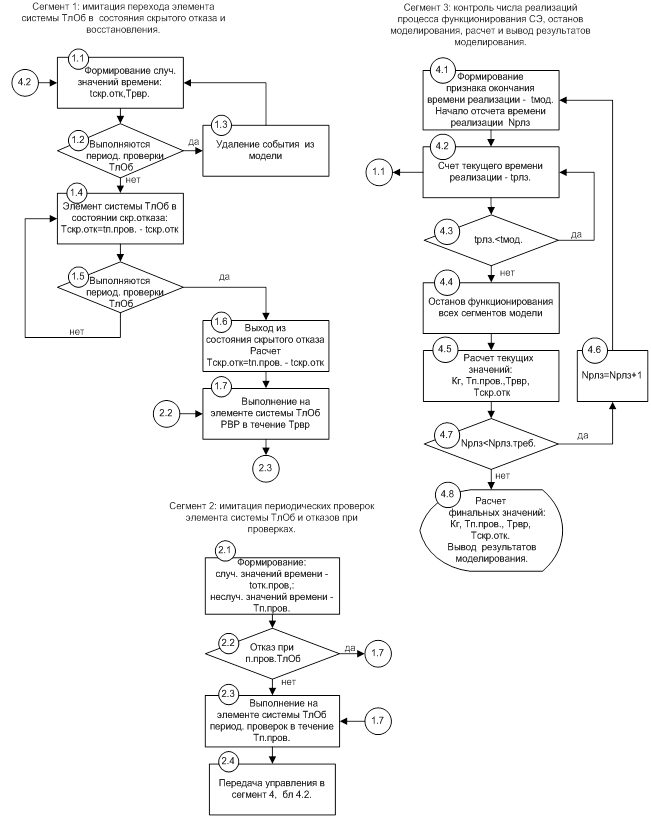
Рисунок 2 – Схема функционирования сегментов модели «жесткой» стратегии управлениятехническим состоянием элемента системы ТлОб СК.
События в модели могут происходить только в хронологической последовательности, возможность возврата назад во времени отсутствует. Эта последовательность событий моделируется прохождением транзактов по соответствующей последовательности блоков в течение заданного времени моделирования. Таймером модельного времени управляет интерпретатор, планирующий время наступления каждого события и их очередность в соответствии с логикой работы системы. Интерпретатор не изменяет отсчет модельного времени до тех пор, пока не произойдут все события, которые могут произойти в текущий момент модельного времени. В любой момент модельного времени место транзакта в модели может быть определено с двух позиций: он может находиться в каком-то конкретном блоке или состоять в одной (нескольких) цепях событий. Цепь представляет собой список, в который интерпретатор вносит транзакты по мере выполнения программы модели. В разрабатываемой модели СЭ будут задействованы три вида цепей:
- цепь текущих событий (ЦТС);
- цепь будущих событий (ЦБС);
- цепь задержки (ЦЗ).
В ЦТС включаются транзакты, движение которых планируется в текущий момент модельного времени.
ЦБС состоит из транзактов, движение которых не планируется до наступления некоторого точно известного момента модельного времени, большего, чем текущее. В самом начале моделирования интерпретатор анализирует все блоки, генерирующие транзакты (события), вычисляет время первого события для каждого из них и помещает эти события в ЦБС.
Если транзакт не может войти в следующий блок (например, транзакт попытается войти в блок периодических проверок во время их выполнения на элементе системы ТлОб), то возникает состояние задержки (блокировки) транзакта. Транзакт удаляется из ЦТС и помещается в цепь задержки, связанную с данным с данным моделирующим элементом [2, 4].
Сегменты, разработанные для имитационной модели элемента системы ТлОб, являются универсальными модулями позволяющими построить модель СЭ ТлОб, имеющего любую структуру и содержащего различное количество элементов. Разработку имитационной модели СК можно представить в виде алгоритма, этапы которого соответствуют выделенным в структуре ТлОб уровням иерархии и предполагают использование в качестве исходных данных результатов решения задачи выбора индивидуальных стратегий управления техническим состоянием элементов СК. На основании этих данных разрабатываются имитационные модели элементов систем ТлОб, содержащие соответствующие выбранным стратегиям сегменты. При формировании логики функционирования модели системы ТлОб элементов было сделано предположение об отсутствии резервирования на уровне элементов, что означает следующее:
- система ТлОб находится в состоянии скрытого отказа или восстановления при переходе в него любого входящего в нее элемента;
- система ТлОб находится в состоянии периодических проверок при их выполнении на любом элементе системы.
Имитационные модели систем ТлОб являются исходными блоками при формировании моделей видов ТлОб СК, которые в свою очередь формируют имитационную модель ТлОб всего СК.
В соответствие с подходом, который предполагает последовательное «наращивание» имитационной модели СЭ ТлОб СК от уровня элемента системы до уровня ТлОб СК с использованием универсальных сегментов, разработаем программу, имитирующую функционирование СЭ элементов систем ТлОб с использованием «гибкой» и «жесткой» стратегий управления их техническим состоянием.
Для разработки имитационной модели СЭ ТлОб СК воспользуемся программной средой GPSS WorldStudent (версия 5.1), поддерживающей блочно-ориентированный подход, в рамках которого моделирующий блок имеет свое функциональное назначение и представлен соответствующими функциональными объектами (имеющими аналоги с элементами систем массового обслуживания) и возможности для описания параллельных процессов.
В качестве исходных данных выберем эксплуатационные характеристики элементов систем ТлОб, полученные по результатам мониторинга технического состояния в процессе их эксплуатации: суммарная интенсивность внезапных и постепенных отказов λ= 7, 569∙10-6 ч -1, интенсивность отказов при периодических проверках λПП= 7, 57∙10-4 ч -1 периодичность контроля технического состояния элемента системы ТлОбτК = 2160 ч, время контроля ТК= 8 ч, среднее время выполнения ремонтно-восстановительных работ ТРВР= 24 ч. Вследствие малого времени эксперимента будем считать, что интенсивность отказов постоянна на всем интервале моделирования. В моделируемом элементе системы ТлОб будем выделять состояния, в которых элемент может находиться в процессе эксплуатации при использовании «жесткой» стратегии управления техническим состоянием:
– состояние скрытого отказа (элемент неработоспособен);
– состояние периодических проверок (элемент работоспособен, не готов к применению);
– состояние восстановления (элемент неработоспособен);
– исходное состояние (работоспособен, готов к применению).
Результаты моделирования для времени моделирования ТМОД = 8800 ч и случая идеального контроля и ремонта, то есть при отсутствии ложных отказов и ремонтов, приведены в таблице 1.
Таблица 1
Результаты моделирования СЭ, использующей при управлении техническим состоянием ТлОб «жесткую» стратегию
|
Наименование параметра |
Значение |
|
tсреднпреб. элемента системы ТлОб в сост. скрытого отказа |
21,29 ч |
|
tсреднпреб. элемента системы ТлОб в сост. период.проверок |
32 ч |
|
tсреднпреб. элемента системы ТлОб в сост. восстановления |
0, 661 ч |
|
tсреднпреб. элемента системы ТлОб в работоспособном состоянии |
8746 ч |
|
Среднее количество скрытых отказов |
0,02 |
|
Среднее количество отказов при проверках |
0,005 |
|
КГ элемента системы ТлОб |
0,99386 |
Таким образом, в результате моделирования мы получили значение КГ элемента системы ТлОб при использовании «жесткой» стратегии управления техническим состоянием элемента. Особенность данной модели заключается в том, что значение КГ получено в условиях учета реальных законов распределения времени нахождения элемента в состояниях периодических проверок и восстановления, что позволяет сделать вывод о преимуществе данной модели по сравнению с традиционно используемыми марковскими моделями, допускающими лишь экспоненциальный закон распределения времени нахождения в состояниях.
Рецензенты:
Петров Г.Д., д.т.н., профессор, начальник кафедры ВКА имени А.Ф.Можайского, г. Санкт-Петербург.
Горбулин В.И., д.т.н., профессор, профессор кафедры ВКА имени А.Ф.Можайского, г. Санкт-Петербург.
Библиографическая ссылка
Щербина И.С., Решетников Д.В., Поляков А.П. ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ ЭКСПЛУАТАЦИИ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ СТАРТОВОГО КОМПЛЕКСА // Современные проблемы науки и образования. 2015. № 2-3. ;URL: https://science-education.ru/en/article/view?id=23710 (дата обращения: 28.07.2026).