


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
RESEARCH OF GAS TURBINE UNITS NONLINEAR CONTROL ALGORITHMS

Авиационные газотурбинные установки (ГТУ) находят применение в качестве привода для электрогенераторов на электростанциях. Поскольку в этом случае ГТУ оказываются поставленными в достаточно сложные условия работы, связанные с резкими изменениями электрической нагрузки, необходимостью обеспечить устойчивую работу электростанции как в автономном режиме работы, так и при работе на мощную внешнюю сеть, также возрастают требования к системам управления ГТУ [6]. Эти требования осложняются существенной нелинейностью такого объекта управления, каким является ГТУ [3]. Рассмотрим учет влияния нелинейности модели ГТУ на характеристики систем автоматического управления (САУ) ГТУ.
Нелинейная модель ГТУ для исследования адаптивных регуляторов
Как показали предварительные экспериментальные исследования [4, 9], наиболее влияющей нелинейностью ГТУ является изменение постоянной времени турбокомпрессора ТTK в зависимости от мощности нагрузки ГТУ Ng.
В рассматриваемой модели эта постоянная времени меняется следующим образом:
а ) При Ng=2500 кВт ТTK=0,5 с – номинальный режим;
б) При Ng=150 кВт ТTK =3 с – холостой ход.
При этом уравнения нелинейной модели ГТУ приобретают следующий вид в виде передаточной функции:
![]() ; (1)
; (1)
в пространстве состояний систему уравнений представим в виде:
![]() ; (2)
; (2)
где x – вектор состояния системы, u – вектор управления, A(x) – нелинейная матрица коэффициентов.
Введем нелинейную зависимость TТК = f (Ng) в нашу модель в качестве нелинейного блока (НБ1) (рис. 1). ДГ – это дозатор газа, устройство для автоматического отмеривания (дозирования) заданной массы или объема газов. ДГ представлен апериодическим звеном. Сам дозатор газа является идеальным интегрирующим звеном, но охвачен для повышения стабильности работы отрицательной обратной связью. В модели у нас две постоянные времени, это постоянные времени турбокомпрессора (ТТК) и свободной турбины (ТСТ). Gt – расход газа, А – угол поворота дозатора газа, nткс – частота вращения турбокомпрессора в статическом режиме, K1, K2, K3 – коэффициенты усиления ГТУ. На рисунке 2 показан нелинейный блок НБ1.
На рисунке 3 нелинейная модель, показанная на рисунке 1, включена в схему с ПИД-регулятором [4]. Ранее в [4] мы рассматривали линейную модель с ПИД-регулятором. Теперь, поскольку объект стал нелинейным, необходимо внести нелинейности в алгоритм ПИД-регулятора для реализации так называемой табличной настройки [7]. Нелинейный блок НБ1 реализует пропорциональную ветвь, НБ2 – дифференциальную ветвь, интегральная ветвь оставлена неизменной, так как это звено не зависит от значения постоянного времени регулятора (Тр2), KР – общий коэффициент усиления регулятора.
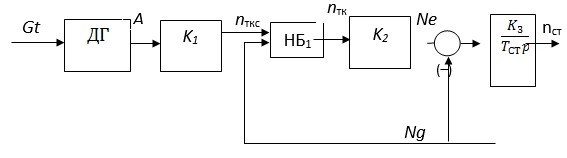
Рис. 1. Нелинейная модель ГТУ
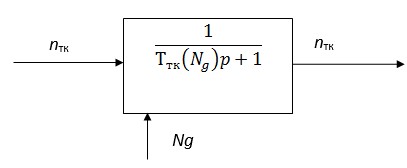
Рис. 2. Нелинейная блок ГТУ(НБ1)
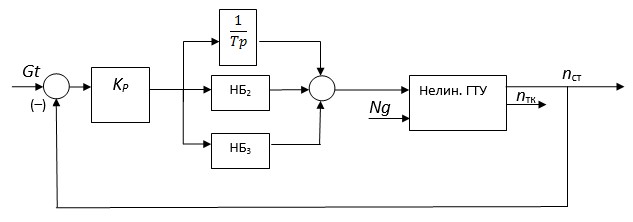
Рис. 3. Нелинейная модель ГТУ с ПИД-регулятором
В целом для исследований используется комплекс из трех моделей САУ ГТУ: а) с идеальной линейной моделью ГТУ [3], б) с нелинейной моделью ГТУ с параметрами регуляторов САУ, настроенными как для линейной модели, в) с нелинейной моделью и с табличной настройкой.
Все три графика изменения частоты вращения свободной турбины nСТ ГТУ показаны на рисунке 3 в одинаковом масштабе. Назначение указанных выше моделей следующее: а) эталонная модель, переходный процесс, которой стремимся получить; б) модель, в которой параметры ПИД-регулятора остались прежними как в линейном случае [4], несмотря на то, что была введена нелинейная зависимость TТК = f (Ng); в) принцип табличного управления состоит в том, что, зная заранее возможные изменения параметров системы (например, из-за возможных изменений нагрузки), выполняют для нескольких разных режимов расчет параметров регулятора. Значения этих параметров записывают в таблицу [7]. В процессе функционирования системы измеряют величину, которая характеризует режим работы системы (в нашем случая это нагрузка Ng), и в зависимости от ее значений выбирают из таблицы величины коэффициентов ПИД-регулятора [7].
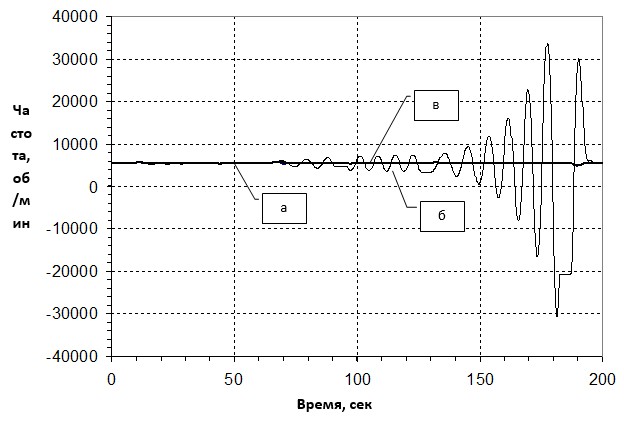
Рис. 4. Временные характеристики (частота вращения свободной турбины nСТ ГТУ) комплекса систем с тремя моделями
Как мы видим по графику на рисунке 4, нелинейная модель (б) с параметрами САУ для линейной модели является неустойчивой, появляются нарастающие незатухающие колебания. Исключим ее из сравнительного анализа для подробного ознакомления с временными характеристиками систем с идеальной линейной моделью и с нелинейной моделью с табличной настройкой (рис. 5).
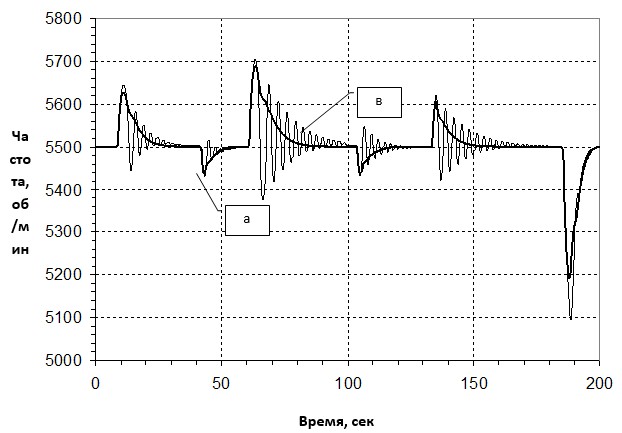
Рис. 5. Временная характеристика (частота вращения свободной турбины nСТ ГТУ) с идеальной линейной моделью(а) и моделью с табличной настройкой при Тр2=2(в)
Поставим задачу улучшить показатели качества регулирования с помощью системы с табличной настройкой за счет изменения постоянных времени. Для получения настроечной таблицы производится изменение одного из параметров регулятора, а именно Тр2, в передаточной функции ПИД-регулятора [1]:
![]() (3)
(3)
При изменении значения Тр2 изменяются значения коэффициентов усиления пропорционального (Kп) и дифференцирующего звена (Кд), интегрирующее звено не меняется (Ки), поэтому на рисунке 3 нелинейные блоки введены в пропорциональную и дифференциальную ветви ПИД-регулятора, а интегральная ветвь оставлена неизменной. На рисунках 6–8 показаны графики переходных процессов при изменении нагрузки ГТУ при последовательном увеличении значения Тр2 САУ для частоты вращения свободной турбины nСТ ГТУ.
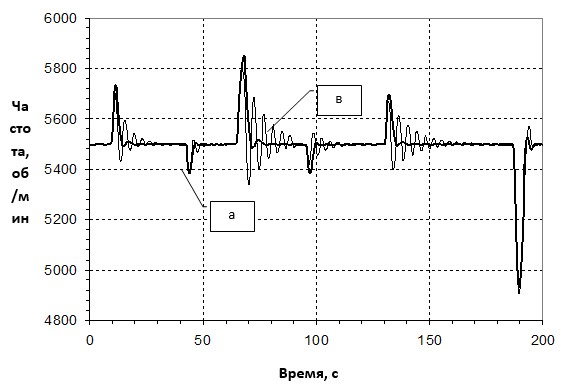
Рис. 6. Временная характеристика с идеальной линейной моделью(а) и моделью с табличной настройкой при Тр2=4(в)
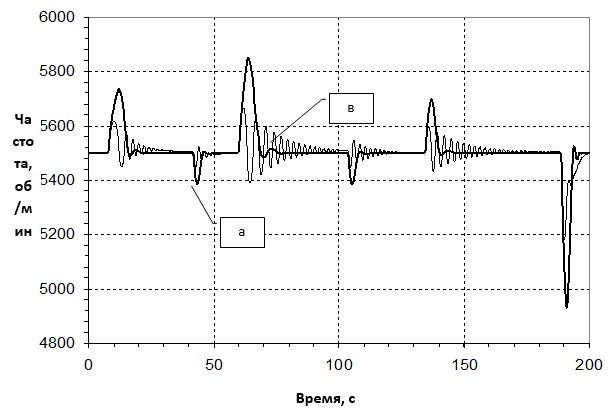
Рис. 7. Временная характеристика с идеальной линейной моделью(а) и моделью с табличной настройкой при Тр2=6(в)
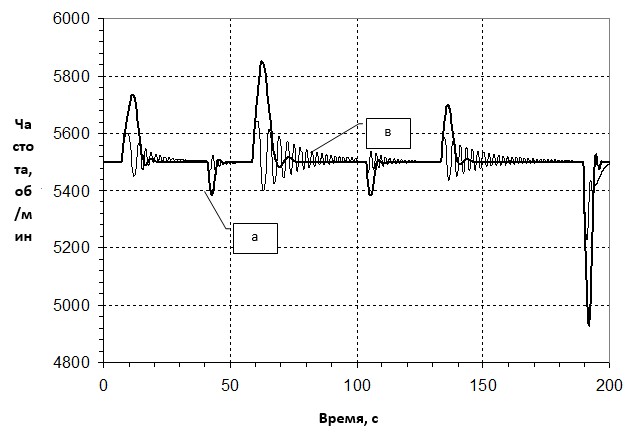
Рис. 8. Временная характеристика с идеальной линейной моделью(а) и моделью с табличной настройкой при Тр2=8(б)
Из рассмотрения графиков 5–8 выявлено, что с ростом Тр2 максимальное отклонение уменьшается, но возрастает колебательность. Окончательный выбор Тр2 должен быть сделан исходя из компромисса между этими показателями качества и требованиями к системе.
Результаты настройки для различной нагрузки (Ng) сведены в таблицу 1, здесь обозначено: KП, KД – соответственно полученные настройки коэффициентов усиления пропорциональной и дифференциальной частей ПИД-регулятора.
Таблица 1
Настройки табличного регулятора для рисунков 5–8
|
Тр2 |
Ng, кВт |
150 |
500 |
1000 |
1500 |
2000 |
2500 |
2600 |
|
2 |
KП |
43,00 |
40,01 |
30,40 |
22,91 |
15,45 |
8,00 |
6,52 |
|
KД |
12,00 |
11,14 |
8,40 |
6,26 |
4,13 |
2,00 |
1,58 |
|
|
4
|
KП |
85,00 |
79,01 |
59,80 |
44,82 |
29,90 |
15,00 |
12,03 |
|
KД |
24,00 |
22,29 |
16,80 |
12,52 |
8,26 |
4,00 |
3,15 |
|
|
6
|
KП |
127,00 |
118,02 |
89,20 |
66,73 |
44,35 |
22,00 |
17,55 |
|
KД |
36,00 |
33,43 |
25,20 |
18,78 |
12,38 |
6,00 |
4,73 |
|
|
8
|
KП |
169,01 |
157,02 |
118,60 |
88,64 |
58,79 |
29,00 |
23,07 |
|
KД |
48 |
44,58 |
33,60 |
25,04 |
16,51 |
8,00 |
6,30 |
Табличная настройка регулятора означает, что в ПИД-регулятор записана таблица 1, тем самым производится непрерывное изменение коэффициентов усиления САУ при изменении нагрузки ГТУ.
В результате осуществляется приспособление регулятора к изменяющейся нагрузке. Однако такое приспособление в строгом смысле нельзя назвать адаптацией. Несмотря на то что отдельные авторы считают такой регулятор адаптивным, на самом деле речь надо вести, как указывается, например, в [7], не о адаптивном регуляторе, а о регуляторе нелинейном. Следовательно, здесь в соответствии с системным принципом соответствия нелинейный регулятор соответствует нелинейному объекту. Собственно адаптации, т.е. приспособления САУ к изменяющимся условиям внешней среды, здесь не происходит. Таблица настроек получается один раз и впоследствии не меняется.
Нелинейные системы с автоматической настройкой регулятора
Полученная ранее таблица 1 рассчитывалась вручную. Для сокращения времени и повышения качества настройки применим алгоритм оптимизации, основанный на использовании симплексного метода [3]. На рисунке 9 представлена схема автоматической настройки. Задача этой схемы — получить настроечную таблицу. Поэтому вновь подчеркнем, что в строгом смысле рассматриваемая система также не является адаптивной. В этой схеме таблица получается один раз перед началом функционирования САУ.
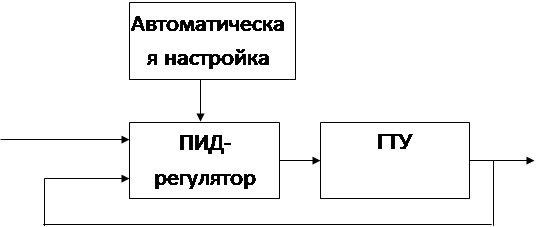
Рис. 9. Нелинейная система с автоматической настройкой регулятора
Для схемы на рисунке 9 осуществим сброс и наброс нагрузки в определенные промежутки времени, изменяя потребляемую мощность нагрузки. В результате постоянная времени ротора турбокомпрессора также будет изменяться (рис. 10).
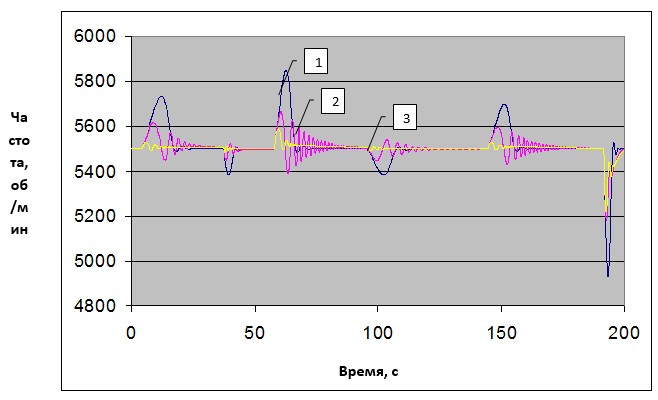
Рис. 10. Изменение постоянной времени ротора турбокомпрессора ТТК
Далее произведем настройку регулятора симплексным методом по схеме на рисунке 9 для каждого участка нагрузки, получим общую таблицу настройки САУ. Сравним результаты настройки с ранее полученной настройкой при ТP2=6 (рис. 10).
Рис. 10. Переходные процессы:1 — Линейная система с настройками регулятора для нелинейной, 2 — Нелинейная система с настройками регулятора при ТP2=6, 3 — Нелинейная система с автоматической настройкой
Как видим из рисунка 10, при сравнении трех САУ качество переходного процесса нелинейной системы с автоматической настройкой регулятора значительно лучше, что доказывает эффективность рассматриваемой схемы по сравнению с линейной системой с настройками регулятора для нелинейной системы и нелинейной системой с настройками регулятора при Тр2=6.
Полученные параметры сведены в таблицу 2.
Таблица 2
Параметры П и Д табличной настройки
|
|
об/мин |
150 |
500 |
1000 |
1500 |
2000 |
2500 |
2600 |
|
авто-настройка |
KП |
126,00 |
144,3 |
323,51 |
220,66 |
133,39 |
1,54 |
15,38 |
|
|
KД |
470,00 |
438,17 |
519,69 |
294,13 |
73,87 |
1,10 |
2,54 |
|
при Тр2=6 |
KП |
127,00 |
118,01 |
89,20 |
66,73 |
44,35 |
22,00 |
17,55 |
|
|
KД |
36,00 |
33,43 |
25,20 |
18,78 |
12,38 |
6,00 |
4,73 |
Из таблицы 2 видно существенное различие коэффициента усиления дифференцирующего звена ПИД-регулятора KД, что подтверждает, насколько сильно различаются переходные процессы нелинейной системы с настройками регулятора при Тр2=6 и нелинейной системы с автоматической настройкой.
Вывод
Проведенные исследования нелинейных алгоритмов управления показали, что при учете нелинейности переходный процесс системы существенно изменяется, поэтому для качественного улучшения процесса целесообразно использовать табличную настройку и автоматическую настройку параметров системы. При сравнении трех моделей переходный процесс нелинейной системы с автоматической настройкой регулятора намного лучше, что доказывает эффективность этой модели по сравнению с линейной системой с настройками регулятора для нелинейной системы и нелинейной системой с настройками регулятора при Тр2=6.
В дальнейшем поставлена задача улучшить показатели качества и устойчивости, используя методы адаптивного управления [2, 5], чему будет посвящена отдельная статья.
Опубликованные в статье результаты получены в рамках выполнения государственного задания Минобрнауки РФ № 13.832.2014/K «Разработка методологических основ адаптивного управления автономными и неавтономными газотурбинными электростанциями мощностью до 25 МВт» [6].
Рецензенты:
Шулаков Н.В., д.т.н., профессор, профессор кафедры электротехники и электромеханики, ФГБОУ ВПО «Пермский Национальный Исследовательский Политехнический Университет», г. Пермь;
Казанцев В.П., д.т.н., профессор, профессор кафедры микропроцессорных средств автоматизации, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь.
Библиографическая ссылка
Зиятдинов И.Р., Кавалеров Б.В. ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ АЛГОРИТМОВ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМИ УСТАНОВКАМИ // Современные проблемы науки и образования. 2015. № 2-2. ;URL: https://science-education.ru/en/article/view?id=22962 (дата обращения: 27.06.2026).