


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
MAGNETIZES SYSTEM RAMJET TYPE

Приборы с замкнутой магнитной цепью предназначены для определения магнитных характеристик МТМ на образцах-свидетелях, в форме цилиндров и прямоугольных параллелепипедов, имеющих шлифованные поверхности. К таким устройствам относятся устройства промышленного изготовления: БУ-3, У-541, У5022, У5032, У5045, У5056; устройства, разработанные в МЭИ: АРСПГ–3, АРСПГ–4, МИС–1; в ЦНИИИА и еще целый ряд устройств. Среди зарубежных устройств этого типа следует отметить ряд моделей гистериографов фирм Walkerscientificinc, AEG, Magnet-Physicsinc [1;5]. К недостаткам таких устройств можно отнести низкую производительность и трудность автоматизации операций установки постоянных магнитов (ПМ) в измерительную позицию. Поэтому такие устройства предназначены для испытания изделий, выпускаемых малыми партиями, и не могут быть применены для заготовок ПМ.
К приборам с неполностью замкнутой магнитной цепью относятся использующие метод сравнения испытуемого ПМ с образцовым. Примером может служить прибор смостовым дифференциальным магнитопроводом (рис. 1). В нем осуществляется сравнение магнитных потоков образцового 1 и испытуемого 2 ПМ чувствительным элементом 3. Неравенство потоков F1 и F2 приводит к появлению их разности DF в среднем зазоре.
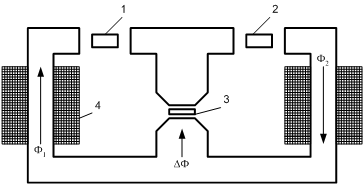
Рис.1.Дифференциальный магнитный мост
Немагнитные зазоры, созданные у торцов ПМ, позволяют осуществлять контроль заготовок ПМ. При этом напряженность внешнего магнитного поля, создаваемая обмотками 4, обеспечивает получение нужного рабочего участка на кривой размагничивания. В таких устройствах сравнивают характеристики двух ПМ, но не определяют значения их параметров, а наличие образцового ПМ делает такие установки узкоспециализированными.
Для решения проблем управления технологическим процессом производства ПМ, а также их приемо-сдаточных испытаний наиболее приемлемы методы и приборы контроля в полуразомкнутой магнитной цепи, позволяющие легко устанавливать заготовки ПМ в измерительную позицию, автоматизировать процесс измерения и не требующие дополнительной их механической обработки.
Известные конструкции намагничивающих систем не приспособлены для быстрой и точной установки ПМ в измерительную позицию, поэтому не позволяют в полной мере в цеховых условиях автоматизировать процесс смены испытуемых изделий.
Этот недостаток устранен в намагничивающих системах прямоточного типа (НСПТ) [2-4; 6-10]. Достоинством НСПТ является удобство загрузки и выгрузки образцов, т.к. движение последних происходит под действием собственного веса и магнитного поля по траектории, не имеющей отклонений от прямой линии. Конструкция НСПТ для полупостоянных магнитов (сплавы типа 15НЮТ:Hc = 2 – 4 кА/м, Bm = 1,5 – 1,6 Тл) в виде цилиндров диаметром 2,5–3мм, длиной 35 мм (рис. 2) представляет собой систему с полуразомкнутой магнитной цепью, содержащую две намагничивающие катушки 1, 5 и магнитопровод2.
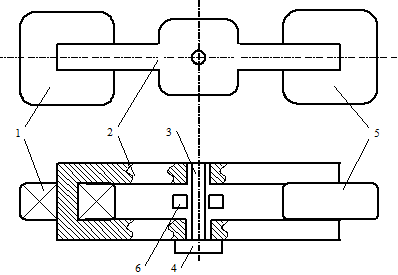
Рис.2. Конструкция НСПТ для цилиндрических полупостоянных магнитов
В измерительной позиции магнит 3 удерживается заслонкой 4. Магниты загружаются в НС через отверстия в полюсах. Намагничивающие катушки вынесены из межполюсного пространства с целью облегчения доступа к блоку 6 первичных преобразователей индукции и напряженности.
Конструкция НСПТ для ПМ, изготовленных из сплавов ЮНДК15, ЮН15ДК25, ЮН14ДК24, 30Х23КС (Hc = 40 ¸ 50 кА/м, Bm = 0,7 ¸ 1,35 Тл), намагниченных вдоль продольной оси, приведена на рис. 3. НСПТ содержит намагничивающие катушки 1 и 6, магнитопровод 2 броневой конструкции, в полюсах которого находится сквозной канал с помещенной в него немагнитной направляющей 3. В центральной части направляющей находится блок первичных преобразователей индукции и напряженности 5. Работает НСПТ следующим образом. Испытуемый ПМ 4 поступает в направляющую и движется по ней под действием силы тяжести.Одновременно в намагничивающие катушки подается ток, создающий в межполюсном пространстве НСПТ магнитное поле напряженностью, достаточной для фиксации ПМ в измерительной позиции (центр межполюсного пространства). После установки ПМ в измерительную позицию срабатывают механические прижимы (на рис. 3 не показаны), удерживающие его в этом положении. Далее осуществляется перемагничивание ПМ по заданной программе под действием магнитного поля, создаваемого током в намагничивающих катушках.
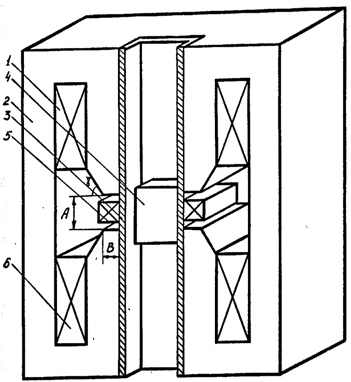
Рис.3. Конструкция НСПТ для ПМ, намагниченных вдоль продольной оси
Для ПМ, намагничиваемых поперек продольной оси, НСПТ имеет конструкцию, показанную на рис. 4.
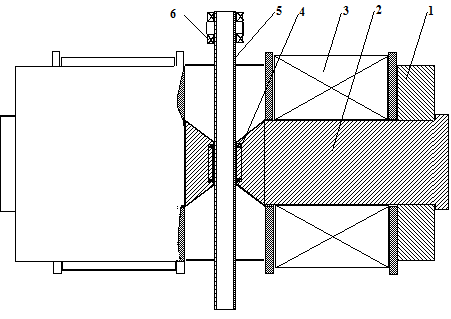
Рис.4.Конструкция НСПТ для ПМ, намагниченных поперек продольной оси
НСПТ представляет собой электромагнит броневого типа, содержащий ярмо 1, полюсные наконечники 2, намагничивающие обмотки 3 и немагнитную направляющую 5. Конструктивно с НС связаны: первичный преобразователь индукции 4, состоящий из двух измерительных катушек, включенных последовательно и размещенных на торцах полюсных наконечников; первичный преобразователь напряженности – измерительная катушка, расположенная между полюсными наконечниками на немагнитной направляющей (на рис. 4 не показана). Кроме того, в верхней части немагнитной направляющей 5 расположены намагничивающие катушки 6, обеспечивающие импульсное намагничивание ПМ, изготовленных из высококоэрцитивных МТМ. Для увеличения магнитного потока в рабочем зазоре НСПТ полюсные наконечники имеют специальную конусную форму. Применение НСПТ позволяет обеспечить производительность контроля 1200–1800 образцов в час. Контролируемый ПМ может иметь форму параллелепипеда либо цилиндра, намагниченного по оси или диаметру. При наличии у ПМ оси легкого намагничивания система производит не только транспортировку (перемещение) его в измерительную позицию, но и ориентацию по линии магнитной текстуры. Анализ типоразмеров ПМ показал, что такая НСПТ может быть использована для большинства двухполюсных ПМ.
Проведенные исследования НСПТ на натурных образцах и математических моделях показали, что для ПМ массой 0,01 кг время движения в измерительную позицию – 0,45 с, точность позиционирования – 0,6 мм. Проведены исследования работы НСПТ для заготовок ПМ массой 0,0093 и 0,0107 кг. При этом время установления в измерительную позицию изменялось от 0,39 до 0,45 с, а точность позиционирования от 0,51 до 0,43 мм.
Статья подготовлена с использованием оборудования ЦКП «Диагностика и энергоэффективное электрооборудование» ЮРГПУ(НПИ).
Рецензенты:Гречихин В.В., д.т.н., профессор кафедры «Информационные и измерительные системы и технологии», ФГБОУ ВПО «Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова», г. Новочеркасск;
Елсуков В.С., д.т.н., профессор кафедры «Автоматика и телемеханика», ФГБОУ ВПО «Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова», г. Новочеркасск.
Библиографическая ссылка
Ланкин М.В., Горбатенко Н.И., Ланкин А.М. НАМАГНИЧИВАЮЩИЕ СИСТЕМЫ ПРЯМОТОЧНОГО ТИПА // Современные проблемы науки и образования. 2015. № 1-2. ;URL: https://science-education.ru/en/article/view?id=19935 (дата обращения: 02.08.2026).
DOI: https://doi.org/http://www.science-education.ru/125-19935