


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
COGNITIVE MODELS ERGAMATA

Технические звенья эргаматов описываются обыкновенными дифференциальными уравнениями вида:
![]() ,
,
где: ![]() - состояние выходных переменных объекта управления,
- состояние выходных переменных объекта управления,
![]() - состояние входных управляющих переменных объекта управления,
- состояние входных управляющих переменных объекта управления,
![]() - возмущающее воздействие на объект.
- возмущающее воздействие на объект.
В частности, к таким системам относятся системы: «оператор – летательный аппарат» или «оператор – имитатор объекта».
Наибольшие трудности при аналитических исследованиях возникают вследствие того, что к настоящему времени процесс формирования управляющих воздействий оператора на основе сравнения информационной и концептуальной моделей недостаточно изучен. В связи с этим затрудняется использование многих известных методов теории управления для анализа, например, динамики полета управляемого оператором объекта [3…7]. Недостаточное качество обучающих комплексов также объясняется отсутствием требуемого информационного подобия указанных выше двух систем (слабая изученность и формализация взаимодействий оператора и объекта управления в замкнутой системе). Во многих случаях предполагается, что оператор, как звено системы управления, имеет одну входную величину ![]() (на индикаторе представляется лишь одна величина; оператор является одноканальным звеном). Однако внешнее впечатление многоканальности налицо, так как частота переключения внимания у человека может быть достаточно высокой.
(на индикаторе представляется лишь одна величина; оператор является одноканальным звеном). Однако внешнее впечатление многоканальности налицо, так как частота переключения внимания у человека может быть достаточно высокой.
Результатом когнитивного анализа [1,2] является орграф (рис.1)
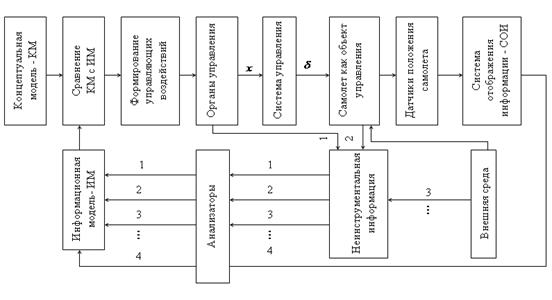
Рис.1. Орграф транспортной эргатической системы:
1 – усилия на органах управления, 2 – изменение положения объекта относительно
внешних ориентиров, 3 – акселерационная информация, 4 – изменение положения объекта, характеризуемое показаниями приборов
Как видим, структурная схема всего эргамата представляется в виде, приведенном на рис.2.
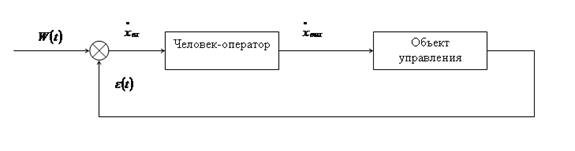
Рис.2.Структурная схема эргамата:
![]() - входной и
- входной и ![]() - выходной сигналы для звена «человек-оператор»
- выходной сигналы для звена «человек-оператор»
Человек-оператор собирательно определяется как совокупность, состоящая из системы отображения информации, человека и органов управления. Структура звена «человек-оператор» представляется в виде, приведенном на рис.3.

Рис.3. Структурная схема оператора
В режиме компенсаторного слежения индикатор показывает лишь рассогласование между входной и выходной величинами ![]() . Функция человека-оператора сводится к уменьшению ошибки
. Функция человека-оператора сводится к уменьшению ошибки ![]() до нуля (директорное управление).
до нуля (директорное управление).
Известно описание операторской деятельности человека на основе обобщенной рабочей характеристики:
![]() .
.
Это исчерпывающая характеристика человека как звена системы (определяет время, в течение которого человек может выполнить над сигналом, характеризуемым оператором ![]() , преобразования, характеризуемые оператором
, преобразования, характеризуемые оператором ![]() , с точностью
, с точностью ![]() ).
).
Операторами ![]() и
и ![]() характеризуется операторская деятельность человека:
характеризуется операторская деятельность человека:
![]() ,
, ![]() .
.
Оператор ![]() указывает, какой сигнал по сравнению с некоторым опорным сигналом
указывает, какой сигнал по сравнению с некоторым опорным сигналом ![]() поступает к человеку. А оператор
поступает к человеку. А оператор ![]() указывает, какие функциональные преобразования выполняет человек над этим сигналом с точностью до
указывает, какие функциональные преобразования выполняет человек над этим сигналом с точностью до ![]() (в зависимости от
(в зависимости от ![]() при одном и том же
при одном и том же ![]() резко изменяется характер операторской деятельности человека). К сожалению, остаются открытыми вопросы о структуре опорного сигнала и степени коррелированности
резко изменяется характер операторской деятельности человека). К сожалению, остаются открытыми вопросы о структуре опорного сигнала и степени коррелированности ![]() от
от ![]() .
.
Ниже на примере продольного движения предлагается структурная схема замкнутой системы (рис.4), в определенной степени позволяющая выяснить указанные вопросы.
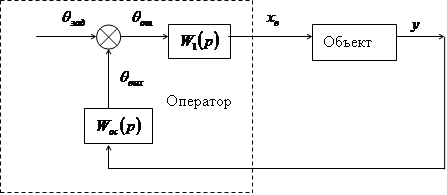
Рис.4. Структурная схема управления продольным движением:
![]() - передаточная функция анализатора,
- передаточная функция анализатора, ![]() - передаточная функция моторной части оператора, сумматор – сравнивающее «устройство» центральной нервной системы
- передаточная функция моторной части оператора, сумматор – сравнивающее «устройство» центральной нервной системы
Можно показать,
![]() ;
;
![]() ,
, ![]() .
.
Так что
![]() .
.
Решением уравнения идентификации в частотной области по синхронным измерениям ![]() и
и ![]() определяется обобщенная передаточная функция системы, которая обычно и используется в качестве приближения передаточной функции объекта (участие человека в системе не учитывается):
определяется обобщенная передаточная функция системы, которая обычно и используется в качестве приближения передаточной функции объекта (участие человека в системе не учитывается):
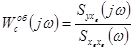 ,
,
![]() ;
;
![]() содержит коррелированный с
содержит коррелированный с ![]() сигнал (изображение -
сигнал (изображение - ![]() ).
).
Легко показать,
![]() .
.
Здесь ![]() – изображение коррелированного с
– изображение коррелированного с ![]() сигнала. Если бы
сигнала. Если бы ![]() не зависел от
не зависел от ![]() (разомкнутая система), то
(разомкнутая система), то ![]() при определении
при определении ![]() ;
; ![]() можно рассматривать как задающее воздействие.
можно рассматривать как задающее воздействие.
Если ![]() (система разомкнута), то
(система разомкнута), то ![]() (
(![]() никогда тождественно не обращается в нуль). Верно и обратное, если
никогда тождественно не обращается в нуль). Верно и обратное, если ![]() , то
, то ![]() .
.
Таким образом, если ![]() , то
, то ![]() ; управление объектом осуществляется по разомкнутому каналу. И обратно, если управление объектом производится по разомкнутому каналу, то
; управление объектом осуществляется по разомкнутому каналу. И обратно, если управление объектом производится по разомкнутому каналу, то ![]() . Если для директорного режима
. Если для директорного режима ![]() , то по
, то по ![]() и
и ![]() определяется
определяется ![]() . Мысль об управлении объектом по разомкнутому каналу не нова. Здесь дается лишь один из возможных способов для установления этого факта.
. Мысль об управлении объектом по разомкнутому каналу не нова. Здесь дается лишь один из возможных способов для установления этого факта.
Далее. Пусть по синхронным измерениям ![]() и
и ![]() в процессе нормальной эксплуатации имитатора определена частотная передаточная функция
в процессе нормальной эксплуатации имитатора определена частотная передаточная функция ![]() ; по ее асимптотической характеристике можно определить и параметры
; по ее асимптотической характеристике можно определить и параметры ![]() . Пусть также одним из способов экспериментально определена передаточная функция собственно имитатора
. Пусть также одним из способов экспериментально определена передаточная функция собственно имитатора ![]() . По изложенному выше тогда можно определить часть
. По изложенному выше тогда можно определить часть ![]() выходного сигнала, коррелированную с
выходного сигнала, коррелированную с ![]() . По
. По ![]() и
и ![]() всегда можно подобрать
всегда можно подобрать ![]() так, что:
так, что:
![]() ;
;
![]() определена по данным нормальной эксплуатации самолета,
определена по данным нормальной эксплуатации самолета, ![]() вычислена с использованием данных эксперимента на имитаторе.
вычислена с использованием данных эксперимента на имитаторе.
Из полученного соотношения непосредственно вытекает методика идентификации самолета по данным нормальной эксплуатации [3].
Рецензенты:
Логанина В.И., д.т.н., профессор, зав.кафедрой управления качеством и технологий строительного производства Пензенского государственного университета архитектуры и строительства, г. Пенза;
Кошев А.Н., д.х.н., профессор, профессор кафедры информационно-вычислительных систем Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Гарькина И.А., Данилов А.М., Нашивочников В.В. КОГНИТИВНЫЕ МОДЕЛИ ЭРГАМАТА // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=18702 (дата обращения: 22.07.2026).