


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
DEVELOPMENT OF THE ALGORITHM OF INTERACTION INCIDENT PARTICLES IN MODELING OF BULK LAYER

Проблема повышения технико-экономических показателей обжиговых машин, а также металлургической ценности железорудных окатышей, связана с необходимостью жесткого контроля и управления режимом термообработки сырых окатышей. Одним из путей решения этой проблемы является разработка системы оценки газопроницаемости слоя сырых окатышей. Такая система должна проводить анализ гранулометрического состава окатышей и моделировать на его основе процесс их укладки на входе в обжиговую машину. Создание такой системы позволит оптимизировать расход газа, требуемого для обжига, снизить трудозатраты, связанные с замерами и обработкой данных о поступающем потоке окатышей, прогнозировать на основе полученных данных характеристики обожженных окатышей.
Система оценки газопроницаемости слоя сырых окатышей должна состоять из трех основных блоков:
1. Блок получения изображения монослоя окатышей, сходящих с роликового укладчика на конвейер обжиговой машины. Данный блок комплектуется одной или несколькими видеокамерами, фиксирующих положение окатышей на роликовом укладчике через определенные промежутки времени, контроллера, синхронизирующего камеры и управляющего частотой съемки, а также интерфейса для передачи данных в вычислительный модуль системы.
2. Блок распознавания образов окатышей на полученных видеоизображениях и перевода их положения и размеров в условные координаты. В рамках данного модуля должен быть реализован наиболее эффективный алгоритм распознавания окатышей на изображении. Он должен с высокой скоростью, минимальными затратами машинных ресурсов и приемлемой погрешностью выделять отдельные окатыши на исходных снимках и, таким образом, рассчитывать их гранулометрический состав.
3. Блок моделирования процесса падения окатышей на конвейер обжиговой машины. В блоке моделируется насыпной слой окатышей на входе в обжиговую машину с помощью алгоритма взаимодействия падающих частиц и рассчитывается его газопроницаемость. Кроме этого должна быть реализована визуализация моделируемого процесса с возможностью сохранения полученных результатов.
Реализация первого и второго блоков системы может быть выполнена с помощью программно-аппаратного комплекса "ГРАНИКС" (предыдущее название "Индикатор крупности"), предназначенного для оценки гранулометрического состава сыпучих материалов в потоке [6]. Важнейшим этапом создания блока моделирования процесса падения окатышей является этап разработки алгоритма взаимодействия падающих частиц при формировании насыпного слоя.
Основная часть
На сегодняшний день перед разработчиками трехмерных приложений открываются широкие перспективы. Современные технические и программные средства позволяют строить физические модели поведения огромного количества частиц, с высокой точностью и реалистичностью. Имитация поведения объектов с использованием законов физики реального мира требует наличия значительных вычислительных мощностей. C появлением многоядерных процессоров появилась возможность распределить эти задачи между процессорными ядрами [5]. Анализ литературы [2, 3, 7] показал, что для моделирования реального физического процесса наиболее эффективным будет использование имитационной модели. Согласно [1] функционирование модели должно протекать в искусственном (не в реальном и не в машинном) времени, обеспечивая появление событий в требуемом логикой работы исследуемой системы порядке и с надлежащими временными интервалами между ними. При этом надо учитывать, что элементы реальной системы функционируют одновременно (параллельно), а компоненты машинной модели действуют последовательно, так как реализуются с помощью ЭВМ последовательного действия. Поскольку в различных частях объекта моделирования события могут возникать одновременно, то для сохранения адекватности причинно-следственных временных связей необходимо предусмотреть механизм задания времени для синхронизации действий элементов модели системы. Существует два основных подхода к заданию времени: с помощью постоянных и переменных интервалов времени, которым соответствуют два принципа реализации моделирующих алгоритмов, т.е. "принцип ![]() " и "принцип dz". Рассмотрим соответствующие способы управления временем в модели на примере, показанном на рисунке 1, где по оси реального времени отложена последовательность событий в системе {Si} во времени, причем события S4 и S5 происходят одновременно (рис. 1, а)
" и "принцип dz". Рассмотрим соответствующие способы управления временем в модели на примере, показанном на рисунке 1, где по оси реального времени отложена последовательность событий в системе {Si} во времени, причем события S4 и S5 происходят одновременно (рис. 1, а)
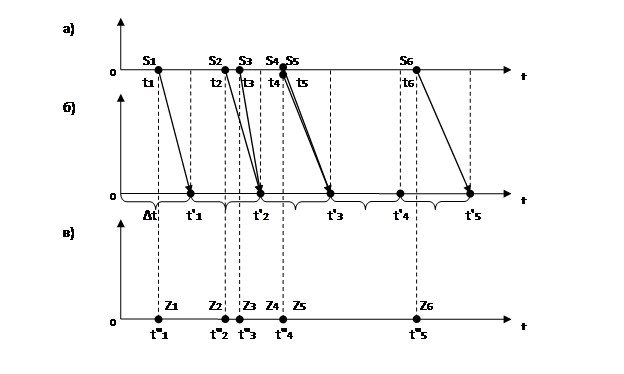
Рисунок 1. Способы управления временем в модели системы
В модели, построенной по "принцип ![]() " (рис. 1,б), моменты системного времени будут последовательно принимать значения
" (рис. 1,б), моменты системного времени будут последовательно принимать значения ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() . Эти моменты системного времени
. Эти моменты системного времени ![]() никак не связаны с моментами появления событий Si, которые имитируются в модели системы. Системное время при этом получает постоянное приращение, выбираемое и задаваемое перед началом имитационного эксперимента.
никак не связаны с моментами появления событий Si, которые имитируются в модели системы. Системное время при этом получает постоянное приращение, выбираемое и задаваемое перед началом имитационного эксперимента.
В модели, построенной по "принцип dz" (рис. 1,в), изменение времени наступает в момент смены состояния системы, и последовательность моментов системного времени имеет вид ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() , т.е. моменты системного времени
, т.е. моменты системного времени ![]() непосредственно связаны с моментами появления событий Si в системе.
непосредственно связаны с моментами появления событий Si в системе.
У каждого из этих методов есть свои преимущества с точки зрения адекватного отображения реальных событий S в системе и затрат машинных ресурсов на моделирование. При использовании "принципа dz" события обрабатываются последовательно и время смещается каждый раз вперед до начала следующего события. В модели, построенной по "принципу ![]() ", обработка событий происходит по группам, пакетам или множествам событий. При этом выбор
", обработка событий происходит по группам, пакетам или множествам событий. При этом выбор ![]() оказывает существенное влияние на ход процесса и результаты моделирования, и если
оказывает существенное влияние на ход процесса и результаты моделирования, и если ![]() задана неправильно, то результаты могут получиться недостоверными, так как все события появляются в точке, соответствующей верхней границе каждого интервала моделирования. При применении "принципа dz" одновременная обработка событий в модели имеет место только тогда, когда эти события появляются одновременно и в реальной системе. Это позволяет избежать необходимости искусственного введения ранжирования событий при их обработке в конце интервала
задана неправильно, то результаты могут получиться недостоверными, так как все события появляются в точке, соответствующей верхней границе каждого интервала моделирования. При применении "принципа dz" одновременная обработка событий в модели имеет место только тогда, когда эти события появляются одновременно и в реальной системе. Это позволяет избежать необходимости искусственного введения ранжирования событий при их обработке в конце интервала ![]() .
.
При моделировании по "принципу ![]() " можно добиться хорошей аппроксимации: для этого
" можно добиться хорошей аппроксимации: для этого ![]() должно быть малым, чтобы два неодновременных события не попали в один и тот же временной интервал. Но уменьшение
должно быть малым, чтобы два неодновременных события не попали в один и тот же временной интервал. Но уменьшение ![]() приводит к увеличению затрат машинного времени на моделирование, так как значительная часть тратится на корректировку "часов" и отслеживание событий, которых в большинстве интервалов может и не быть. При этом даже при сильном "сжатии"
приводит к увеличению затрат машинного времени на моделирование, так как значительная часть тратится на корректировку "часов" и отслеживание событий, которых в большинстве интервалов может и не быть. При этом даже при сильном "сжатии" ![]() два неодновременных события могут попасть в один и тот же временной интервал
два неодновременных события могут попасть в один и тот же временной интервал ![]() , что создает ложное представление об их одновременности.
, что создает ложное представление об их одновременности.
Для построения модели взаимодействия физических тел был выбран метод задания времени "![]() ", так как он является наиболее простым в реализации, а также позволяет управлять затратами машинного времени и точностью моделирования.
", так как он является наиболее простым в реализации, а также позволяет управлять затратами машинного времени и точностью моделирования.
Базовая идея алгоритма взаимодействия падающих частиц заключается в анализе положения гранулы (окатыша) в определенный момент времени с учетом всех воздействующих на нее факторов. На рисунке 2 приведена схема алгоритма. Как видно из схемы в алгоритме присутствует множество точек ветвления. Такое построение алгоритма позволяет выбирать наиболее эффективные способы определения положения гранулы в пространстве в различных ситуациях [4].
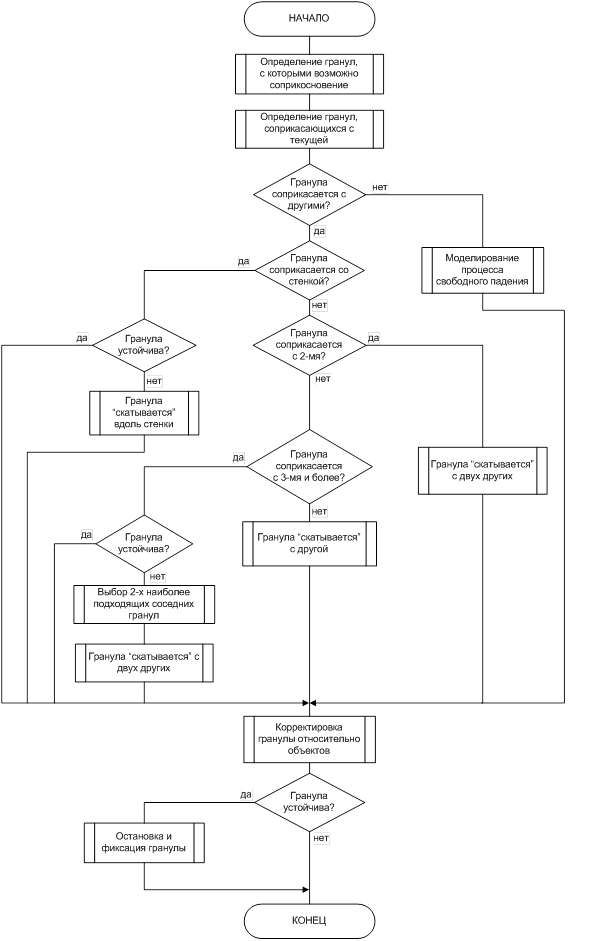
Рисунок 2. Схема алгоритма определения положения гранулы
Модель насыпного слоя формируется посредством последовательной обработки временных интервалов заданной продолжительности. При этом вычисляется положение всех гранул модели на момент окончания каждого периода времени. Определение положения отдельной гранулы осуществляется на основе анализа окружающих ее объектов – стенок, ограничивающих емкость, и других гранул, с которыми возможно ее взаимодействие.
После запуска процесса моделирования активизируется таймер, по событию которого выполняются следующие действия:
- вычисляется положение всех подвижных гранул на момент окончания интервала времени;
- если необходимо, генерируется очередная гранула.
На рисунке 3 проиллюстрирован процесс формирования насыпного слоя из гранул сферической формы. Задача визуализации процесса моделирования насыпного слоя выполнена с помощью графического стандарта OpenGL. Графическая библиотека позволяет создавать сложные трёхмерные сцены из простых примитивов.
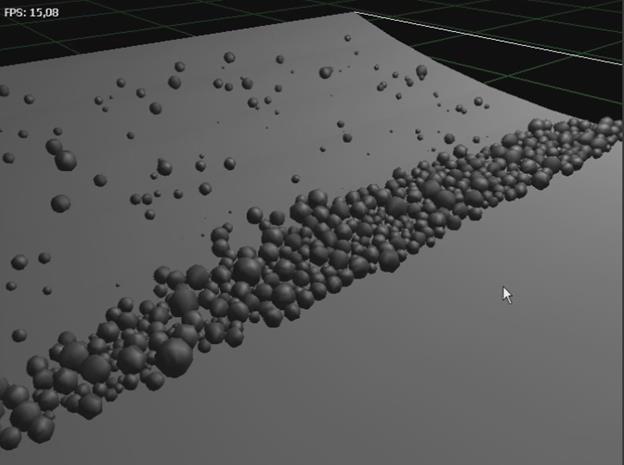
Рисунок 3. Визуализация процесса формирования насыпного слоя
При генерации и загрузке координат гранулы к массиву подвижных гранул добавляется одно или несколько значений. Вычисления положения всех гранул реализуется в процедуре, в которой в цикле перебираются все падающие гранулы и для каждой из них производится расчет новых координат.
Заключение
Таким образом, основная идея алгоритма взаимодействия падающих частиц заключается в том, что для построения конечной модели насыпного слоя окатышей обрабатывается последовательность временных интервалов заданной продолжительности. При этом вычисляется положение всех гранул модели на момент окончания каждого периода времени. Определение положения отдельной гранулы осуществляется на основе анализа окружающих ее объектов – стенок обжиговой тележки, ее основание или другие гранулы, с которыми возможно ее взаимодействие.
Рецензенты:
Поршнев С.В., д.т.н., профессор, заведующий кафедрой "Радиоэлектроники информационных систем" УрФУ, г. Екатеринбург;
Доросинский Л.Г., д.т.н., профессор, заведующий кафедрой "Теоретических основ радиотехники" УрФУ, г. Екатеринбург.
Библиографическая ссылка
Круглов В.Н., Чирышев А.В., Фритц В.А. РАЗРАБОТКА АЛГОРИТМА ВЗАИМОДЕЙСТВИЯ ПАДАЮЩИХ ЧАСТИЦ ПРИ МОДЕЛИРОВАНИИ НАСЫПНОГО СЛОЯ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=17977 (дата обращения: 01.07.2026).