


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
CONSTRUCTION OF A MATHEMATICAL MODEL OF A RANDOM POSITION OF THE AIRCRAFT DURING LANDING

Заключительным этапом полета любого воздушного судна является заход на посадку. На этом этапе полета экипаж воздушного судна выводит его на предпосадочную прямую – глиссаду планирования[7, 8].
Выполнение этого этапа полета является самым ответственным и может, осуществляется как с использованием технических средств посадки (с использованием радионавигационного оборудования), так и визуально по естественным ориентирам на местности. В качестве ориентировки экипаж воздушного судна использует естественную линию горизонта и наблюдаемую взлетно-посадочную полосу (ВПП) [7, 8].
Следует отметить, что визуальный заход на посадку экипажу воздушного судна разрешают выполнить органы воздушного движения (ОВД) в случае установления визуального контакта ВПП [7, 8].
Главными факторами, оказывающими влияние на установление визуального контакта экипажа воздушного судна с ВПП, являются метеорологические величины (метеорологические минимумы). Значения метеорологических минимумов для каждого воздушного судна и конкретного аэродрома различны. Эти минимумы рассчитываются по специальным методикам для каждого аэродрома с учетом естественных и искусственных препятствий находящихся в непосредственной близости от аэродрома. Кроме того учитываются и особенности скоростного режима воздушного судна выполняющего заход на посадку [7, 8].В качестве примера приведем типичные значения метеорологических минимумов:
-
видимость 2-3 км, высота нижней границы облаков 150-300 метров – для визуального захода на посадку самолетов 4 класса (АН-2, вертолеты всех типов);
-
видимость 5 км, высота нижней границы облаков 600метров – для визуального захода на посадку самолетов 1-3 класса (АН 24 и все более тяжелые) [7, 8].
Целью работы – определение возможных отклонений воздушного судна относительно глиссады планирования (выше или ниже) при совершении экипажем воздушного судна визуальной посадки.
Материалы исследований. Метеорологические величины изменяются как во времени, так и в пространстве. Известно что, совокупность значений метеорологической величины во всём пространстве называют полем этой величины.
Слой атмосферы неоднороден и может быть разделен на приземный подслой (слой трения) и свободную атмосферу. В подслоях наблюдаются несколько еще более тонких слоев, отличающихся от соседних величиной показателя преломления[5].
К ним относятся: инверсии - слои с резким локальным падением температуры, слои повышенной влажности, слои с повышенным содержанием аэрозолей, облачные; наконец, такие локальные образования как пузыри и термики, также могут располагаться в воздухе слоями [5].
Количественной мерой изменения метеорологических величин в пространстве служат градиенты этих величин. Наибольший практический интерес представляют горизонтальный и вертикальный градиенты метеовеличины. Горизонтальный градиент всегда положителен[6,9].
Вертикальный градиент может быть как положительным, так и отрицательным. Справедливо следующее общее правило: если метеорологическая величина убывает, то вертикальный градиент положителен, если величина растет с высотой, то вертикальный градиент этой величины отрицателен. Наиболее важные в метеорологической практике – вертикальный и горизонтальный градиенты давления и температуры [6, 9].
Будем характеризовать слоистые неоднородности величиной градиента показателя преломления на их границах, т.е. в переходном слое. Здесь следует заметить, что количество слоев, находящихся одновременно на километровом интервале высоты неравномерно распределено по высоте. Так, например, на высотах 0,1-2 км в среднем слоев в два раза больше, чем на высотах 3-5 км [5].
В [4] были представлены восстановленные на основе данных температурно-ветрового зондирования атмосферы профили показателя преломления атмосферы. При определении величины показателя преломления использовалась зависимость последнего от абсолютной температуры (Т), атмосферного давления (р) и парциального давления водяного пара (е)
 (1)
(1)
где сомножитель при 10-6 представляет собой показатель преломления атмосферы, выраженный в N - единицах [1, 2, 5].
В результате проведенных исследований в [2, 4] было установлено, что в атмосфере возникают сезонные и суточные изменения показателя преломления, которые способны приводить к искажениям траекторий визуального наблюдения в атмосфере. Для устранения ошибок при определении местоположения воздушного судна относительно ВПП необходимо учитывать возникающие в атмосфере изменения показателя преломления [4].
В качестве источника получения информации о показателе преломления служит фактическое состояние слоя атмосферы в районе ВПП, а именно температура, влажность воздуха и атмосферное давление.
В рамках поставленной задачи в [3] было сделано предположение о том, что земная поверхность является плоской, т.е. ее кривизной можно пренебречь. Атмосфера здесь представляется как совокупность тонких слоев с постоянными, в пределах слоя, значениями показателя преломления (n0, n1, ….ni), т.е. слои расположены параллельно земной поверхности, причем n0 <ni[1]. Для удобства рассмотрения вертикальная ось направлена вниз к земной поверхности.
В [3] были получены аналитические выражения определяющие положение воздушного судна в пространстве относительно глиссады планирования.
Так выражение (2) позволяет определить проекцию на земную поверхность траектории наблюдения через i-слой атмосферы с учетом вертикального градиента показателя преломления атмосферы γn [1, 3].
 (2)
(2)
где 
![]()
Траектория визуального определения местоположения ВПП может сильно отличаться от прямолинейной и зависит от вертикального профиля показателя преломления атмосферы [3]. Так, ВПП может наблюдаться как ближе, так и дальше своего истинного местоположения. При этом величина ошибок определения горизонтальной дальности ВПП будет зависеть от величины вертикального градиента показателя преломления атмосферы, мощности слоев, в которых наблюдаются эти градиенты, а также величины угла наблюдения ВПП по отношению к горизонту [2, 4].
Следует также заметить что, прежде чем воздушное судно достигнет точки, находящейся от начала ВПП на расстоянии 4 км допускаются определенные отклонения от глиссады. После этого о любых отклонениях от глиссады воздушному судну орган ОВД сообщает конкретное расстояние (в метрах) выше или ниже глиссады.
При отклонениях воздушного судна от курса и глиссады на участке траектории полета за пределы, превышающие предельно допустимые, орган ОВД дает команду его экипажу об уходе на второй круг [7].
В данной работе предпринята попытка в рамках граничных условий описанных в [3], учитывая вертикальный профиль показателя преломления провести расчет возможных отклонений воздушного судна выше или ниже относительно глиссады планирования.
Пусть ВС находится в точке А на высоте h0 от земной поверхности (рис.1). Горизонтальная дальность ВПП от ВС определяется проекцией траектории наблюдения из точки А до ВПП на ось ОХ, направленную вдоль поверхности земли. Наблюдение ВПП осуществляется под углом φ0 относительно нормали к земной поверхности в направлении АВ, т.е. глиссады планирования. Вертикальные изменения показателя преломления атмосферы приводят к изменению траектории наблюдения АО′ и величину угла φ0 [3].
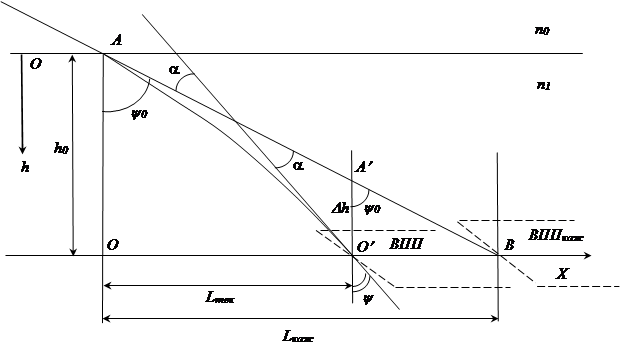
Рис. 1. Реальное и кажущееся положение воздушного судна относительно глиссады снижения
Из треугольников АОВ и А′О′В (рис.1) имеем
![]() (3)
(3)
Выразив А′О′ИЗ (3) получим:
![]() (4)
(4)
Заменив в (4) стороны треугольников АОВ и А′О′В через их соответствующие значения (см. рис. 1) и с учетом того что
![]()
и
![]()
окончательно получим:
 (5)
(5)
Известно, что на границе раздела соседних слоев с различными значениями показателя преломления выполняется известное соотношение:
![]() (6)
(6)
где n0, n1 – показатели преломления на границе раздела соседних слоев; j0, j1 – угол падения и преломленный угол относительно нормали к границе раздела двух соседних слоев с показателями преломления n0 и n1соответственно.
Из рис. 1, в случае n1>n0 видно, что отклонение прямолинейной траектории АВ к виду АО′, приводит к отклонению горизонтальных проекций соответствующих траекторий на земную поверхность и вызывает ошибку в определении положения ВПП, проекции Lкаж и Lтек соответственно [3].
Вывод формулы для Lтек – проекции на земную поверхность траектории наблюдения через i-й слой атмосферы достаточно подробно представлен в [1] и в этой статье не приводится.
Подставляя в выражение (5) выражение для расчета Lтеки проведя соответствующие преобразования в общем виде получим:
 (7)
(7)
Заключение. Подставляя в полученное выражение данные о фактическом состоянии вертикального профиля метеорологических элементов и величин их градиентов можно рассчитать величину возможных ошибок и определить случайное положение воздушного судна относительно глиссады планирования при совершении экипажем визуального захода на посадку.
Рецензенты:
Сумин В.И., д.т.н., профессор, профессор кафедры управления и информационно-технического обеспечения, ФКОУ ВПО «Воронежский институт ФСИН России», г. Воронеж;
Ирхин В.П., д.т.н., доцент, профессор кафедры основ радиотехники, ФКОУ ВПО «Воронежский институт ФСИН России», г. Воронеж.
Библиографическая ссылка
Бобров В.Н., Корчагин В.В. ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СЛУЧАЙНОГО ПОЛОЖЕНИЯ ВОЗДУШНОГО СУДНА ПРИ ЗАХОДЕ НА ПОСАДКУ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/en/article/view?id=15417 (дата обращения: 03.07.2026).