


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
RESEARCH ON THE DEPENDENCES OF THE RSS VALUES FROM DIFFERENT WIFI DEVICES IN THE LINE-OF-SIGHT RANGE

В системах локального позиционирования, использующих WiFi-сети, часто используются радиокарты. Радиокарты составляются из радиоотпечатков (от английского «fingerprint»). Метод радиотпечатков основан на сравнении значений RSS в текущей позиции с заранее измеренными значениями в ряде опорных точек [2]. Работа подобных систем позиционирования делится на две фазы – фазу обучения (офлайн) и фазу локализации (онлайн). На фазе обучения в определенных опорных точках формируются вектора значений RSS (Received Signal Strength) от каждой базовой станции (радиоотпечатки), на основе которых создаются радиокарты. На фазе локализации определяется позиция мобильного устройства посредством сопоставления текущих показаний RSS от базовых станций со значениями, хранимыми в эталонных радиокартах.
Существует ряд причин, по которым показания RSS в одних и тех же опорных точках могут существенно отличаться, в частности, в работе [8] авторы выделили четыре основных причины отличия показаний RSS для смартфонов: тип устройства, место размещения устройства на пользователе, направление пользователя (устройства), изменение состояния передающей среды с течением времени. В данной статье рассматривается первая из обозначенных проблем – различный тип устройств.
Разница в показаниях RSS для различных устройств определяется рядом критериев, не зависящих от конечного пользователя, такими, как антенна, поддерживаемый частотный диапазон, поддерживаемые стандарты связи и прочее. Фактическую зависимость между показаниями RSS, регистрируемыми различными устройствами, можно установить лишь эмпирическим путем. Т.к. разница регистрируемых при одинаковых условиях разными устройствами значений RSS определяется чувствительностью приемника, то можно предположить, что зависимость между показаниями RSS будет линейной. Данное предположение как подтверждается, так и опровергается рядом исследователей. Для проверки данного предположения в представленной работе проверена гипотеза о сходстве полученных линейных зависимостей показаний RSS, регистрируемых различными устройствами.
Анализ проблемы
Ввиду массового использования WiFi-сетей существует множество работ, посвященных решению вопросов определения позиции мобильного устройства в таких сетях. В большинстве случаев наибольшей точности позиционирования удается достигнуть лишь при существенном увеличении трудозатрат на фазе обучения, в связи с чем, является актуальной проблема упрощения процедуры обучения без существенного ухудшения качества позиционирования.
Одним из способов упрощения фазы обучения является использование встроенных сенсоров, таких как акселерометр, гироскоп и магнетометр. В работе [6] авторы рассматривают совместное использование радиокарт и показаний встроенных сенсоров, посредством которых определяется траектория движения. Исходной позицией, относительно которой ведется дальнейший расчет траектории, является позиция, вычисленная на основе текущих показаний RSS и показаний RSS полученных на фазе обучения, что требует максимально точного определения начальной точки траектории, но, при этом, не решает проблемы различия значений RSS, регистрируемых разными устройствами.
В работе [8] экспериментальным путем установлено, что разница в значениях RSS для различных устройств может варьироваться в пределах от 1 до 10 дБ, что существенно ухудшает точность расчета дистанций от мобильного устройства до базовых станций даже при использовании траектории движения. При этом автор в своей работе показал, что при увеличении количества базовых станций вероятность более точного определения дистанций до базовых станций увеличивается.
Увеличение количества базовых станций в WiFi-сетях не всегда может дать желаемый результат, кроме того, данный подход имеет ряд ограничений. В работе [1] авторами отмечены особенности построения систем позиционирования на базе WiFi-сетей. Плотность размещения базовых станций в системах WiFi-локации должна быть больше, чем при построении обычных корпоративных WiFi-сетей, но, в то же время, частотные ограничения накладывают определенные требования к количеству «слышимых» в каждой опорной точке базовых станций. В работе [5] авторы отмечают, что показания RSS от некоторых базовых станций могут ухудшать качество позиционирования, в связи с чем, должны игнорироваться при формировании радиокарт на фазе обучения. Кроме того, увеличение количества базовых станций, используемых для локации мобильного устройства, сопровождается увеличением объема хранимой информации и времени расчета. В качестве критериев, исключающих базовые станции из радиокарт, авторы выделяют количество различных значений RSS в опорной точке, процент потерянных значений RSS, общее для всех опорных точек стандартное отклонение показаний RSS (чем выше отклонение, тем лучше распределение). Подобное создание радиокарт увеличивает скорость итоговых расчетов, но не решает обозначенной проблемы.
В работе [7] авторы рассматривают подход, в котором определяется линейная зависимость между показаниями RSS эталонного и отслеживаемого устройства. На основе полученной зависимости в дальнейшем возможна трансформация регистрируемых показаний RSS в значения, хранимые в радиокартах. Для определения локации мобильного устройства авторы используют дополнительную фазу между фазой обучения и фазой локализации – фазу калибровки. На фазе калибровки осуществляется определение линейной зависимости между показаниями RSS эталонного устройства и отслеживаемого. Результаты экспериментов в работе [7] показали, что подобная калибровка системы повышает точность позиционирования на 46%. В то же время, в работе [4] авторы подчеркивают, что в случае использования на фазе локализации мобильных устройств отличных от тех, что использовались на фазе обучения, регистрируемые показания RSS не подлежат сравнению с данными, хранящимися в радиокартах. В качестве альтернативы авторы рассматривают менее точный метод ранжирования регистрируемых показаний RSS.
Предлагаемое решение
Решение поставленной задачи предполагает проведение регрессионного анализа полученных экспериментальным путем зависимостей. Предполагается, что зависимость усредненных показаний RSS одного устройства от усредненных показаний RSS другого устройства будет представлять собой диаграмму рассеяния значений, для которой необходимо получить линейную регрессионную модель, аппроксимирующую данную диаграмму. Допустим, что YRSS представляет вектор значений по оси Y представленной диаграммы рассеяния, а Yline – это вектор значений по оси Y полученной линейной регрессии. В регрессионном анализе критерий Фишера позволяет оценивать значимость линейных регрессионных моделей, в частности, для подтверждения того, что диаграмма рассеяния имеет линейную зависимость, необходимо подтвердить гипотезу о сходстве зависимостей YRSS и Yline на основе критерия Фишера (F). Подтверждением гипотезы о сходстве зависимостей является значение F, вычисленное как отношение выборочных дисперсий зависимостей YRSS и Yline, и не превышающее табличное значение критерия Ft при заданном уровне значимости.
При анализе регистрируемых показаний RSS, помимо свободного затухания сигнала присутствует ряд других факторов, влияющих на уровень сигнала, в частности, в работе [3] авторы отмечают следующие факторы, ухудшающие показания RSS:
- Многолучевое распространения радиосигнала;
- Интерференция;
- Аппаратные помехи на стороне приемника и передатчика.
Данные факторы можно отнести как к изменению передающей среды, обозначенной в работе [8], так и к индивидуальным свойствам конкретного устройства. Наличие данных факторов выступает противовесом гипотезы о сходстве зависимостей YRSS и Yline, т.к. их проявление в большинстве случаев является непредсказуемым и может приводить к усложнению диаграммы рассеяния.
Описание эксперимента
Эксперимент проходил в коридоре здания физико-технического факультета Петрозаводского государственного университета. Использованное в эксперименте оборудование представлено в таблице.
Использованное оборудование
|
Оборудование |
Описание |
|
Базовая станция |
Беспроводная точка доступа Netgear WAG102 |
|
Ноутбук |
Lenovo ThinkPad T500, Intel Core 2 Duo 2.4 ГГц, 2ГБ ОЗУ, Intel Wireless WiFi Link 5300 |
|
Планшет |
Asus Nexus 7 (2013), Qualcomm Snapdragon APQ8064 1500 МГц, 2ГБ ОЗУ, WLAN 802.11 a/b/g/n@2.4GHz/ 5GHz, Android 4.4 |
Замеры RSS проводились в 30 опорных точках, расстояние между которыми составляло 2 метра. Значения RSS были получены из beacon-фрейма, отсылаемого WiFi-точками 1 раз в 100 мс, при этом фактическая частота обновления данных показаний на клиентском оборудовании определялась в каждом конкретном случае алгоритмом работы драйвера беспроводного адаптера, в связи с чем за одно и то же время фиксировалось различное количество значений RSS.

Рис.1. Ориентация устройств
Все устройства располагались на стульях. Ориентации планшета, ноутбука и базовой станции относительно стульев представлены на рисунке 1. Положение антенны (2.4 ГГц, интерфейс 5ГГц отключен) базовой станции было установлено перпендикулярно пола (см. рис. 1). Положения мобильных устройств относительно стульев было одинаковым во всех опорных точках. Положение стульев менялось в ходе измерений в опорной точке относительно стен коридора – стул поворачивался на 90 градусов вокруг вертикальной оси, принимая в каждой опорной точке 4 положения. Начальной опорной точкой для ноутбука являлась точка с номером 1, находившаяся вблизи базовой станции. Для планшета в качестве начальной опорной точки выступила точка с номером 30.
Анализ результатов
Полученные вектора значений RSS были усреднены в каждой опорной точке. Усредненные значения RSS с планками погрешностей для ноутбука и планшета отражены на рисунках 2 и 3. На данных рисунках:
- Планка погрешности – вертикальные линии, отражающие разброс данных в каждой опорной точке;
- Rssi (Received Signal Strength Idication) – усредненные исходные значения RSS;
- 10% отсечено – порог в процентах отсекаемых сверху и снизу значений с целью усреднения без учета выбросов;
- Rssith – усредненные значения RSS c учетом отсеченных значений;
- Rssiraw – исходные значения RSS, квадратные маркеры.
На обоих рисунках на планках погрешностей отражены исходные значения векторов RSS, для отражения разброса исходных данных. При этом максимальный разброс исходных значений RSS для ноутбука и планшета составил 46 и 51 дБм соответственно, в то время, как средние значения данных величин составили 17,9 и 20,9 дБм. С целью уменьшения разброса исходных значений RSS был установлен порог отсечения данных сверху и снизу относительно планок погрешностей, составивший 10% в каждой опорной точке. На рисунках 2 и 3 рядом с основной кривой Rssi, соответствующей усредненным исходным значениям, пунктиром отражена кривая Rssith, соответствующая усредненным значениям с учетом обозначенного порога. Также прерывистыми линиями на графиках отражены пороги отсечения исходных данных. Максимальный разброс в ограниченных сверху и снизу исходных показаниях RSS составил 16 и 39 дБм для ноутбука и планшета соответственно, средние значения разброса при этом уменьшились до 9,4 и 14,9 дБм.
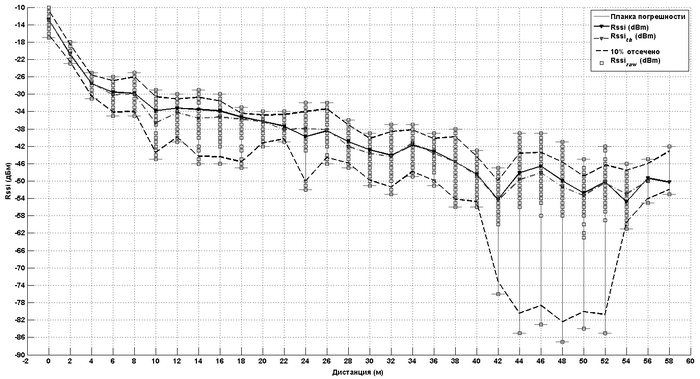
Рис.2. Усредненные значения RSS от базовой станции на ноутбуке
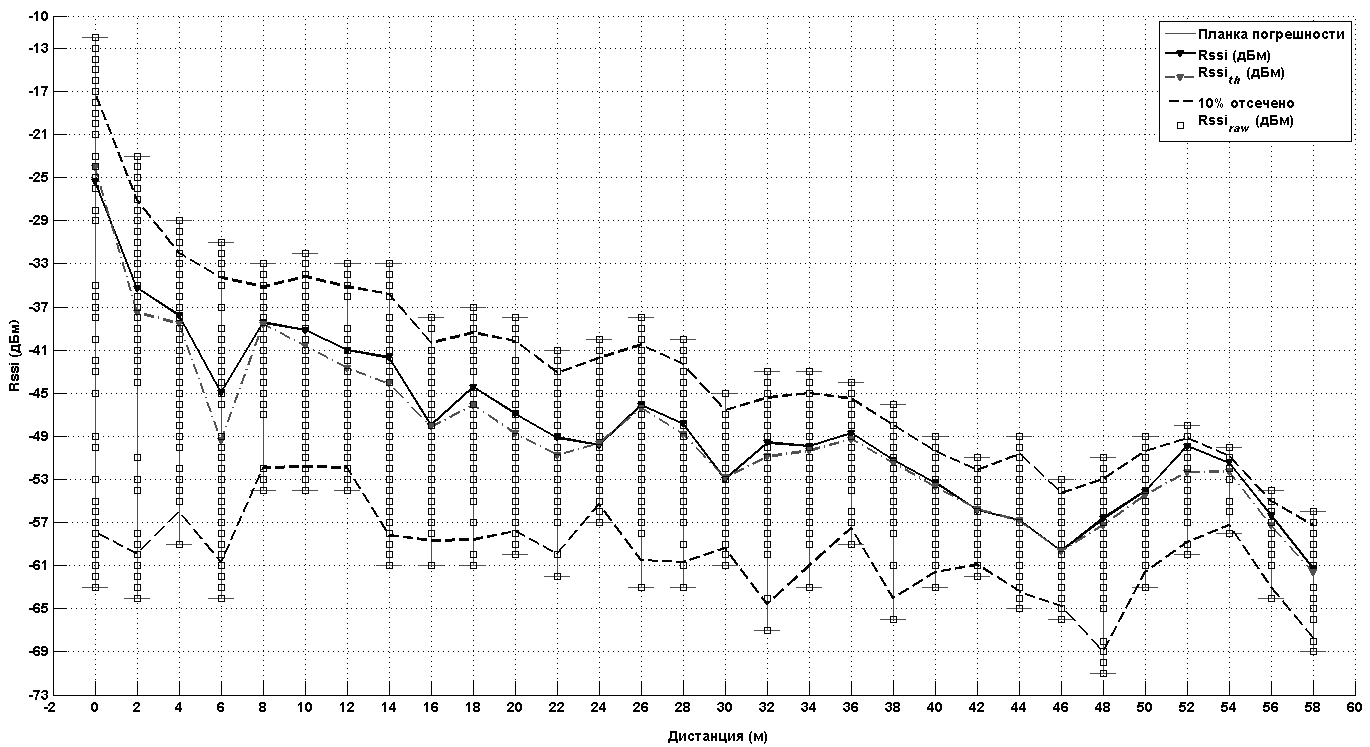
Рис.3. Усредненные значения RSS от базовой станции на планшете
Ниже на рисунках 4 и 5 представлены полученные диаграммы рассеяния показаний RSS планшета от усредненных показаний RSS ноутбука. На данных диаграммах:
- Rssipad(Rssilap) – зависимость показаний планшета от показаний ноутбука – маркеры, образующие диаграмму рассеяния;
- Номера маркеров – номера опорных точек;
- Линейная аппроксимация – линейная регрессия, аппроксимирующая диаграмму рассеяния;
- a, b – коэффициенты полинома линейной регрессии;
- r-square – коэффициент детерминации;
- F – значение критерия Фишера.
Из полученных диаграмм рассеяния видно, что существенного улучшения представленным выше отсечением данных достичь не удалось. В тоже время в обоих случаях линейная регрессия аппроксимирует диаграмму рассеяния в 82% случаев, о чем свидетельствует полученное значение коэффициента детерминации.
Критерий Фишера, вычисленный как отношение выборочных дисперсий полученных диаграмм рассеяния и соответствующих им линейных регрессий при уровне значимости 0,05 и 29 степенях свободы, составил 1,21 и 1,22 при 0% отсеченных данных и 10% соответственно, что не превышает критического значения 1,64 и свидетельствует о сходстве зависимостей, при этом гипотеза о сходстве может быть отвергнута на уровне 5%.
Таким образом, можно сделать вывод о том, что в ходе регрессионного анализ полученных экспериментальным путем диаграмм рассеяния подтверждено сходство диаграммы рассеяния и ее линейной аппроксимации, что позволяет сделать заключение о том, что на основе показаний RSS отслеживаемого устройства возможно определить показания RSS эталонного устройства.
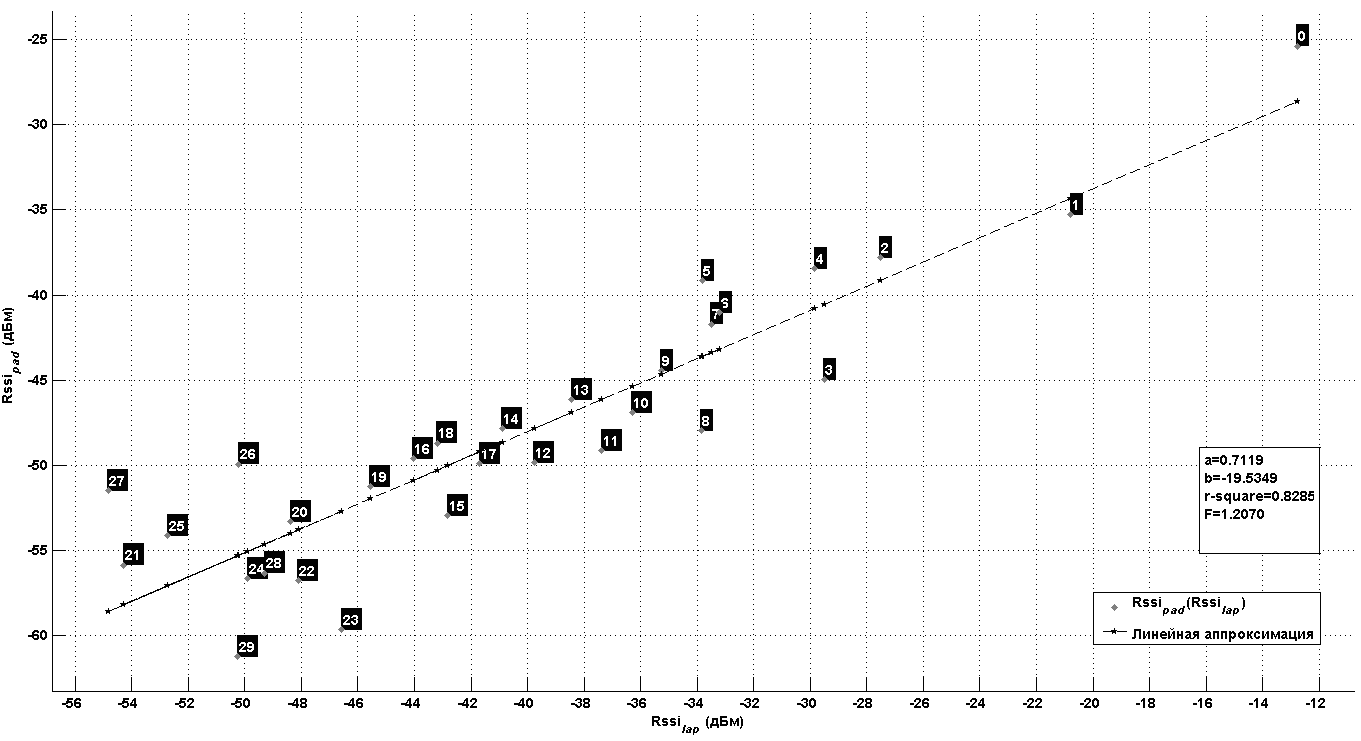
Рис.4. Зависимость Rss ноутбука от планшета (0% отсечено)
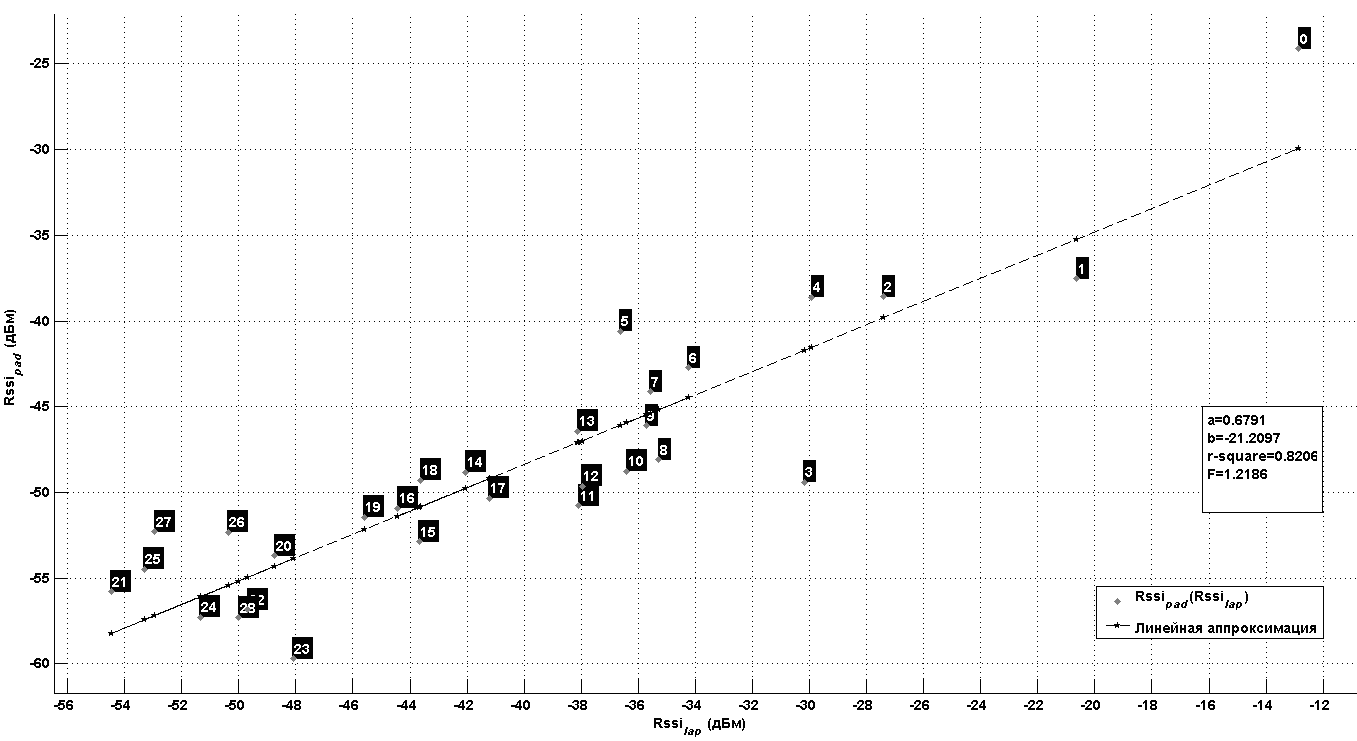
Рис. 5. Зависимость Rss ноутбука от планшета (10% отсечено)
Заключение
Полученные результаты подтвердили гипотезу о сходстве зависимостей показаний RSS, регистрируемых различными устройствами в одних и тех же опорных точках в условиях прямой видимости между мобильным устройством и базовой станцией. Данный результат позволяет утверждать, что на основе показаний RSS эталонного устройства возможно определение местоположения мобильного устройства посредством регистрируемых им показаний RSS в условиях прямой видимости. При этом для реализации подобной задачи для каждого мобильного устройства, отличного от эталонного потребуется фаза калибровки, предполагающая получение минимального набора показаний RSS в заранее определенных опорных точках.
Работа выполнялась при финансовой поддержке Программы стратегического развития ПетрГУ в рамках реализации комплекса мероприятий по развитию научно-исследовательской деятельности.
Рецензенты:
Питухин Е.А., д.т.н., профессор кафедры прикладной математики и кибернетики Петрозаводского государственного университета, г. Петрозаводск;
Печников А.А., д.т.н., доцент, ведущий научный сотрудник Института прикладных математических исследований Карельского научного центра РАН, г. Петрозаводск.
Библиографическая ссылка
Малодушев С.В. ИССЛЕДОВАНИЕ ЗАВИСИМОСТЕЙ RSS РАЗЛИЧНЫX WIFI-УСТРОЙСТВ В УСЛОВИЯХ ПРЯМОЙ ВИДИМОСТИ // Современные проблемы науки и образования. 2014. № 5. ;URL: https://science-education.ru/en/article/view?id=15038 (дата обращения: 25.06.2026).