


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
ON THE ISSUE OF IMPROVING TRAFFIC MANAGEMENT INFORMATION SYSTEMS

Для городского пассажирского транспорта требуется создание крупномасштабных систем управления с использованием центральной ЭВМ. Например, система автобусных перевозок по вызову требует сбора информации о пунктах назначения и отправления пассажиров, последующей ее обработки в реальном масштабе времени для нахождения оптимального маршрута движения и передачи этой информации водителю. Для достижения этой цели требуется создание разветвленной проводной и беспроводной системы передачи информации и использование большого УВК. Еще более усложняет проблему тот факт, что в системах РRТ требуется сбор еще более детальной информации о состоянии экипажей, чем в самой сложной системе управления дорожным движением. Состояние экипажа включает такую информацию, как его идентификация, пункт назначения, точное значение скорости и т.п. Более того, намного больший объем информации должен передаваться между экипажами и центром управления для обеспечения безопасности движения. Для этих целей может потребоваться установка мини-ЭВМ на каждом экипаже, что приведет к образованию большой системы, состоящей из набора малых [1-3].
Хотя имеется, как мы видим, целый ряд проблем, касающихся транспортных систем и до сих пор не нашедших своего решения, мы можем изложить в следующем разделе имеющиеся результаты, связанные с достижимой пропускной способностью и риском появления дорожно-транспортных происшествий.
Хотя целью вождения является увеличение как пропускной способности транспортной системы, так и безопасности движения, эти цели находятся в конфликте [4].
Если  — это расстояние между двумя движущимися друг за другом экипажами,
— это расстояние между двумя движущимися друг за другом экипажами,  — длина экипажа и
— длина экипажа и  — его скорость, тогда пропускная способность с определяется выражением
— его скорость, тогда пропускная способность с определяется выражением
 . (1)
. (1)
Пусть  — это максимально возможное замедление экипажа как функция скорости, и пусть
— это максимально возможное замедление экипажа как функция скорости, и пусть  — минимальное расстояние, необходимое для остановки экипажа, имеющего скорость
— минимальное расстояние, необходимое для остановки экипажа, имеющего скорость  в момент времени
в момент времени  . Тогда имеем
. Тогда имеем
 , (2)
, (2)
где  — время задержки перед началом замедления. Если мы примем, что
— время задержки перед началом замедления. Если мы примем, что  - приблизительно постоянно, то
- приблизительно постоянно, то
 . (3)
. (3)
Если расстояние  (рисунок 1) равно
(рисунок 1) равно , то
, то  определяется выражением
определяется выражением
 , (4)
, (4)
в котором т игнорируется, поскольку оно должно представлять малую величину при автоматическом вождении. Хотя столкновение экипажей может быть абсолютно исключено только при  >1, при нормальной скорости движения
>1, при нормальной скорости движения  примерно равно 0,3. Более того,
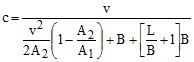
примерно равно 0,3. Более того,  должно быть существенно меньше единицы для получения больших значений пропускной способности [5]. Подставляя выражение (4) в {1), получим значение пропускной способности
должно быть существенно меньше единицы для получения больших значений пропускной способности [5]. Подставляя выражение (4) в {1), получим значение пропускной способности
 . (5)
. (5)
На рисунке 1 показана зависимость между скоростью и пропускной способностью для типичного примера использования экипажей малых размеров с  =2 м и А= 4 м/с2. Например, для того чтобы реализовать с =8000 экип/ч, величина
=2 м и А= 4 м/с2. Например, для того чтобы реализовать с =8000 экип/ч, величина  должна быть, как это ясно из рисунка, менее 0,2, хотя для получения более высоких скоростей при поддержании максимальной пропускной способности необходимо иметь
должна быть, как это ясно из рисунка, менее 0,2, хотя для получения более высоких скоростей при поддержании максимальной пропускной способности необходимо иметь  меньшее 0,1. Для того же примера на рисунке 2 показаны зависящие от
меньшее 0,1. Для того же примера на рисунке 2 показаны зависящие от  границы скоростей, обеспечивающих пропускную способность, большую 8000 экип/ч, а на рисунке 3 — значения
границы скоростей, обеспечивающих пропускную способность, большую 8000 экип/ч, а на рисунке 3 — значения  как функции скорости.
как функции скорости.
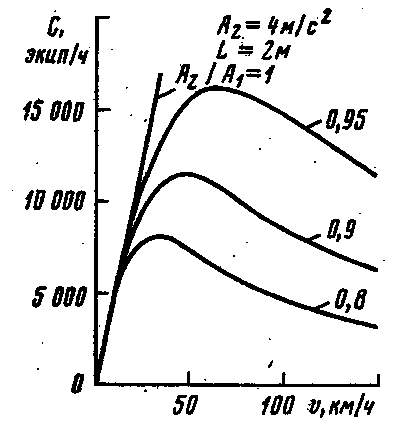
Рис. 1. Зависимость интенсивности движения от скорости.
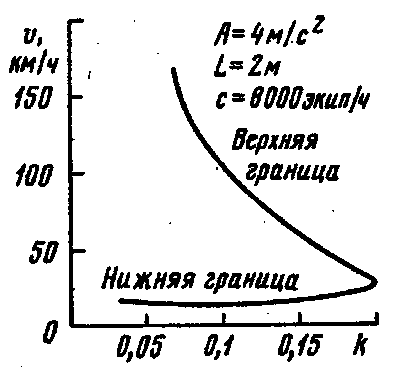
Рис. 2. Скорость, обеспечивающая интенсивность средств 8000 экип/ч.
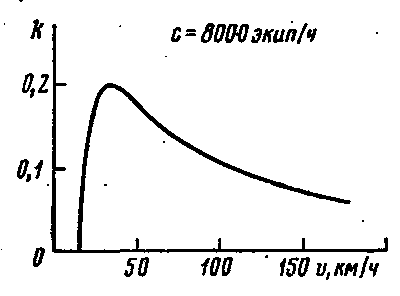
Рис. 3. Величина  , обеспечивающая интенсивность движения транспортных средств 8000 экип/ч.
, обеспечивающая интенсивность движения транспортных средств 8000 экип/ч.
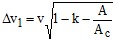
Если используются меньшие значения  , то практически невозможно избежать столкновений при мгновенной остановке экипажа (т.е. при А=
, то практически невозможно избежать столкновений при мгновенной остановке экипажа (т.е. при А= ), связанной, например, с наездом на неподвижное препятствие. Хотя теоретически можно избежать столкновений при таком повышении надежности системы, которое обеспечит остановку всех экипажей с максимальным замедлением А, но дисперсия А не может быть уменьшена до нуля, т.е. А может зависеть случайно от конкретного экипажа [6]. Таким образом, если
), связанной, например, с наездом на неподвижное препятствие. Хотя теоретически можно избежать столкновений при таком повышении надежности системы, которое обеспечит остановку всех экипажей с максимальным замедлением А, но дисперсия А не может быть уменьшена до нуля, т.е. А может зависеть случайно от конкретного экипажа [6]. Таким образом, если  и
и  соответственно представляют замедления следующих друг за другом экипажей и
соответственно представляют замедления следующих друг за другом экипажей и  , тогда минимальное расстояние между ними, позволяющее избежать столкновений, определяется выражением
, тогда минимальное расстояние между ними, позволяющее избежать столкновений, определяется выражением
 . (6)
. (6)
На рисунке 4 показана зависимость между скоростью  и пропускной способностью с для различных значений
и пропускной способностью с для различных значений  .
.
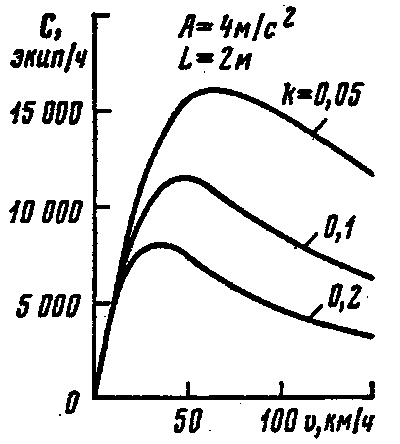
Рис. 4. Зависимость между скоростью и пропускной способностью.
До сих пор обсуждалась «идеальная» модель, в которой расстояние между ТЕ и их скорость подвергались точному измерению. Однако если используется принятая на железных дорогах техника сигнализации и блокировки, то пространственный интервал и расстояние измеряются блоками длиной В, как показано на рисунке 5 [7; 8]. В этом случае пропускная способность с определяется с учетом дисперсии замедления следующим образом:
 , (7)
, (7)
где  означает операцию округления до меньшего целого значения и принято, что
означает операцию округления до меньшего целого значения и принято, что  .
.
На рисунке 4 показана зависимость скорости от пропускной способности для  = 2 м,
= 2 м,  =4 м/с2,
=4 м/с2,  = 0,9,
= 0,9,  =0 (идеальная модель), 1, 2 и 3 м. Хотя с задается кусочно-линейной функцией.
=0 (идеальная модель), 1, 2 и 3 м. Хотя с задается кусочно-линейной функцией.
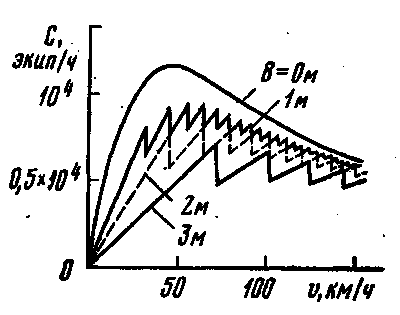
Рис. 5. Столкновение экипажей.
 (если
(если  ), максимальный объем движения, который может быть обеспечен, можно определить по нижней огибающей, он равен:
), максимальный объем движения, который может быть обеспечен, можно определить по нижней огибающей, он равен:
 . (8)
. (8)
Рассмотрим теперь распространение столкновений типа наездов на впереди идущий экипаж. Когда следующие друг за другом экипажи движутся с регулярными интервалами  (
( — это минимальное требуемое для остановки расстояние и
— это минимальное требуемое для остановки расстояние и  ), как это показано на рисунке 5, последующий экипаж может столкнуться с впереди идущим, если лидер останавливается мгновенно (
), как это показано на рисунке 5, последующий экипаж может столкнуться с впереди идущим, если лидер останавливается мгновенно ( ) [9]. Для того чтобы (
) [9]. Для того чтобы ( )-й экипаж не столкнулся с
)-й экипаж не столкнулся с  м, мы должны иметь
м, мы должны иметь
 . (9)
. (9)
Таким образом, число экипажей, вовлеченных в столкновение рассматриваемого типа, можно определить по формуле
 , (10)
, (10)
где  — означает операцию округления до большего целого значения. В более общем случае, если лидирующий экипаж останавливается с замедлением
— означает операцию округления до большего целого значения. В более общем случае, если лидирующий экипаж останавливается с замедлением  , превышающим общее замедление А следующих за ним экипажей, то число столкновений определяется как
, превышающим общее замедление А следующих за ним экипажей, то число столкновений определяется как
 . (11)
. (11)
Если принять, что первое столкновение происходит только после полной остановки лидера, то разница в скоростях в момент первого столкновения равна:
 . (12)
. (12)
Хотя возникающие при столкновениях этого типа разности скоростей  различны в зависимости от конкретного характера дорожно-транспортного происшествия, но если мы примем, что сталкивающиеся экипажи остаются неподвижными, то эти величины равны:
различны в зависимости от конкретного характера дорожно-транспортного происшествия, но если мы примем, что сталкивающиеся экипажи остаются неподвижными, то эти величины равны:
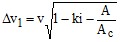 . (13)
. (13)
Таким образом, в системах автоматического вождения существует вероятность множественных столкновений цепного типа при реализации высокого уровня пропускной способности [10]. Эта вероятность должна быть уменьшена до пренебрежимо малого значения путем обеспечения крайне высокой надежности системы. Если мы обозначим ущерб от столкновения при разнице скоростей  через
через  , К — постоянная массы, то «безопасность» системы определяется как
, К — постоянная массы, то «безопасность» системы определяется как
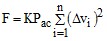 , (14)
, (14)
где  — вероятность столкновения, а
— вероятность столкновения, а  определяется из формулы (11).
определяется из формулы (11).
Рецензенты:
Яковлев К.А., д.т.н., доцент кафедры производства, ремонта и эксплуатации машин ФГБОУ ВПО «Воронежская государственная лесотехническая академия», г. Воронеж.
Кондрашова Е.В., д.т.н., профессор кафедры технического сервиса и технологии машиностроения ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж.
Библиографическая ссылка
Скрыпников А.В., Чистяков А.Г., Дорохин С.В., Кривошеева А.В. К ВОПРОСУ СОВЕРШЕНСТВОВАНИЯ ИНФОРМАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ ТРАНСПОРТОМ // Современные проблемы науки и образования. 2014. № 5. ;URL: https://science-education.ru/en/article/view?id=14974 (дата обращения: 25.06.2026).