



Технические системы охраны (ТСО) в настоящее время активно развиваются в связи с угрозой террористических актов и энергичным развитием информационных технологий. Первичным источником информации о факте проникновения нарушителя на охраняемые объекты являются периметровые средства охраны, которые служат важнейшим элементом интегрированной системы безопасности. Радиолучевые ТСО (РЛТСО) одни из наиболее распространенных периметровых ТСО. Это определяется: высокой вероятностью обнаружения; устойчивостью к изменению метеоусловий; простотой эксплуатации и монтажа по сравнению с другими ТСО. Принцип работы РЛТСО заключается в создании электромагнитного поля в пространстве между приемником и передатчиком – зоне охраны (ЗО), и регистрации изменений параметров этого поля при пересечении его нарушителем [4].
Среди широкого спектра РЛТСО важное значение имеют частотные однопозиционные системы, в которых для обнаружения нарушителя применяется частотный метод радиолокации. В пространство излучается линейно-частотно модулированный (ЛЧМ) сигнал. Непериодический ЛЧМ-сигнал представляет собой сложный радиоимпульс с длительностью TM и внутренней частотной модуляцией. В работе [5] представлена структурная схема РЛТСО с ЧМ, показан принцип работы, который заключается в излучении в пространство ЗО ЛЧМ-сигнала и приеме задержанного ЛЧМ-сигнала, отраженного от нарушителя. Основным элементом структурной схемы является синхронный детектор, в котором формируются биения с частотой, прямо пропорциональной дальности до нарушителя. Измерение частоты биений и определение дальности до нарушителя выполняется с помощью узкополосных фильтров низкой частоты.
В работе [2] показано, что применяя вейвлет-преобразование при обработке ЛЧМ-сигнала в РЛТСО с ЧМ, можно существенно улучшить их технические характеристики. В первую очередь увеличивается отношение сигнал/шум. Это позволит увеличить вероятностные характеристики системы, увеличить протяженность ЗО, снизить мощность излучения. Кроме того, появляется возможность определить количество нарушителей, так как наблюдается существенное сжатие отраженного сигнала после вейвлет-преобразования.
Далее оценим параметры вейвлет-преобразования с целью определения средства реализации на аппаратном уровне. Основными условиями при реализации мобильных РЛТСО являются: малые массогабаритные характеристики, малое энергопотребление, а также высокая надежность системы. Всем этим требованиям в разной степени удовлетворяет современная элементная база цифровых устройств обработки информации в виде программируемых логических интегральных схем (ПЛИС), а также в виде сигнальных процессоров (СП). Для эффективного выбора данных элементов необходимо знать параметры исходного сигнала, а также параметры дискретного вейвлет-преобразования.
Оценка времени пребывания нарушителя в зоне обнаружения
ЗО для однопозиционных РЛТСО аппроксимируется эллиптическим параболоидом (рис. 1). При этом главными характеристиками являются максимальная высота h, ширина r, а также длина l.

Рис. 1. Зона обнаружения однопозиционной РЛТСО
Средняя скорость бегущего человека в быстром темпе примерно равна VH = 32 км/ч (9 м/с), примем это значение за максимальную скорость нарушителя. Отсюда, зная ширину r, можно вычислить примерное время пребывания нарушителя в ЗО: ![]() .
.
В реально выпускаемых РЛТСО ширина ЗО равна 2 м. Тогда минимальное время пребывания нарушителя в ЗО будет равно
![]() (1)
(1)
Определение числа отсчетов для выполнения вейвлет-преобразования
Известно, что процедура превращения непрерывных сигналов в цифровые состоит из двух этапов: дискретизации и квантования. Всегда важно правильно выбрать интервал дискретизации. Задача о выборе интервала дискретизации наиболее просто решается для сигналов с ограниченным спектром на основе теоремы Котельникова [4]. ЛЧМ-сигнал относится именно к таким сигналам. В соответствии с теоремой Котельникова непрерывный сигнал ![]() , в спектре которого не содержится частот выше
, в спектре которого не содержится частот выше ![]() , полностью описывается выборочными значениями
, полностью описывается выборочными значениями ![]() , отсчитанными через интервалы времени
, отсчитанными через интервалы времени  .
.
ЛЧМ-сигнал (рис. 2) описывается центральной частотой ![]() , частотой девиации
, частотой девиации ![]() и частотой модуляции
и частотой модуляции ![]() . При смещении спектра ЛЧМ-сигнала в область низких частот максимальная частота
. При смещении спектра ЛЧМ-сигнала в область низких частот максимальная частота ![]() будет примерно равна
будет примерно равна ![]() .
.
Тогда интервал дискретизации будет равен  , и частота дискретизации –
, и частота дискретизации – ![]() . Частоту дискретизации необходимо брать с запасом из-за неточности гетеродинирования и невысоких порядков входных фильтров
. Частоту дискретизации необходимо брать с запасом из-за неточности гетеродинирования и невысоких порядков входных фильтров
![]() . (2)
. (2)
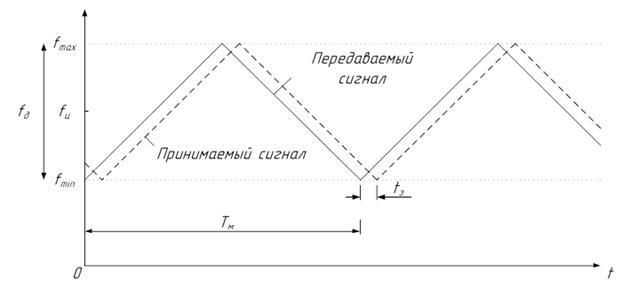
Рис. 2. ЛЧМ-сигнал, используемый в РЛТСО с ЧМ
Для выполнения вейвлет-преобразования (ВП) необходимо к временному отрезку TМ, равному одному периоду передаваемого ЛЧМ-сигнала, прибавить время задержки, т.е. ![]() , которое определяется дальностью до объекта и максимальное значение которого для получения однозначного результата не может быть больше
, которое определяется дальностью до объекта и максимальное значение которого для получения однозначного результата не может быть больше ![]() (рис. 2). С учетом этого возьмем время ВП с запасом, т.е.
(рис. 2). С учетом этого возьмем время ВП с запасом, т.е.
 . (3)
. (3)
Определим число отсчетов ВП с учетом (2) и (3):
 . (4)
. (4)
В таблице 1 показана зависимость числа отсчетов ВП ![]() от частоты девиации
от частоты девиации ![]() и частоты повторения ЛЧМ
и частоты повторения ЛЧМ ![]() . Для реализации ВП можно применить быстрое преобразование Фурье (БПФ). БПФ вычисляется из числа отсчетов, кратных степени 2, поэтому в таблице 1 приведено
. Для реализации ВП можно применить быстрое преобразование Фурье (БПФ). БПФ вычисляется из числа отсчетов, кратных степени 2, поэтому в таблице 1 приведено ![]() округление числа отсчетов до ближайшей степени 2, что приводит к увеличению числа отсчетов и времени ВП:
округление числа отсчетов до ближайшей степени 2, что приводит к увеличению числа отсчетов и времени ВП: ![]() . В последнем столбце таблицы 1 приведены значения числа отсчетов ВП, получаемые за интервал нахождения нарушителя в ЗО (1):
. В последнем столбце таблицы 1 приведены значения числа отсчетов ВП, получаемые за интервал нахождения нарушителя в ЗО (1):
![]() . (5)
. (5)
Таблица 1
Число отсчетов для разных параметров ЛЧМ-сигнала
|
кГц |
МГц |
|
|
МГц |
|
|
|
4 |
25 |
28125 |
32768 |
75 |
437 |
457 |
|
4 |
50 |
56250 |
65536 |
150 |
437 |
457 |
|
4 |
100 |
112500 |
131072 |
300 |
437 |
457 |
|
8 |
25 |
14062,5 |
16384 |
75 |
219 |
913 |
|
8 |
50 |
28125 |
32768 |
150 |
219 |
913 |
|
8 |
100 |
56250 |
65536 |
300 |
219 |
913 |
|
8 |
115 |
64687,5 |
65536 |
345 |
190 |
1052 |
|
8 |
200 |
112500 |
131072 |
600 |
219 |
913 |
|
12 |
25 |
9375 |
16384 |
75 |
110 |
1818 |
|
12 |
50 |
18750 |
32768 |
150 |
110 |
1818 |
|
12 |
100 |
37500 |
65536 |
300 |
110 |
1818 |
|
12 |
170 |
63750 |
65536 |
510 |
129 |
1550 |
|
12 |
200 |
75000 |
131072 |
600 |
110 |
1818 |
|
16 |
25 |
7031,25 |
8192 |
75 |
110 |
1818 |
|
16 |
50 |
14062,5 |
16384 |
150 |
110 |
1818 |
|
16 |
100 |
28125 |
32768 |
300 |
110 |
1818 |
|
16 |
200 |
56250 |
65536 |
600 |
110 |
1818 |
|
16 |
230 |
64687,5 |
65536 |
690 |
95 |
2105 |
Для вычисления БПФ нам необходимо накопить необходимое число отсчетов, время сбора которых равно  . Величина
. Величина ![]() косвенно определяет вероятность и достоверность обнаружения нарушителя. Из таблицы 1 видно, что наиболее оптимальный ЛЧМ-сигнал будет с параметрами
косвенно определяет вероятность и достоверность обнаружения нарушителя. Из таблицы 1 видно, что наиболее оптимальный ЛЧМ-сигнал будет с параметрами ![]() = 12кГц,
= 12кГц, ![]() = 170 МГц. При этом мы получаем лучший в группе показатель по числу выборок с не слишком высокой частотой дискретизации.
= 170 МГц. При этом мы получаем лучший в группе показатель по числу выборок с не слишком высокой частотой дискретизации.
Время выполнения БПФ на различной элементной базе
В цифровой обработке сигналов (ЦОС) преимущественно используются СП и ПЛИС. Изначально СП были более универсальной платформой для разработки приложений ЦОС. Они имели архитектуру, схожую с микроконтроллерами, и ряд библиотек, что упрощало проектирование.
В настоящее время на рынке присутствует множество фирм, выпускающих СП, одной из них является фирма Analog Devices. Для вычисления БПФ в библиотеках, распространяемых Analog Devices, есть специальный модуль. В таблице 2 приведено время выполнения преобразования на различных сигнальных процессорах фирмы Analog Devices.
Таблица 2
Время выполнения БПФ на СП
|
Сигнальный процессор |
ADSP-2189M |
ADSP-21160 |
ADSP-TS001 |
ADSP-TS001 |
|
Число точек |
1024 |
1024 |
256 |
1024 |
|
Разрядность |
16 |
32 |
16 |
32 |
|
Формат точки |
Фикс. |
Плавающая |
Фикс. |
Плавающая |
|
Такт. частота, МГц |
90 |
100 |
150 |
150 |
|
Время выполн. БПФ, мкс |
453 |
180 |
7,3 |
69 |
Применение СП хоть и сокращает время разработки, но для больших объемов обрабатываемых данных не подходит из-за длительных вычислений преобразования. Кроме того, для вычисления БПФ с числом точек более 1024 требуется дополнительная внешняя память, работа с которой еще больше увеличит время преобразования.
Реализация БПФ на ПЛИС требует более глубоких знаний цифровой схемотехники, машинной арифметики, на разработку проекта затрачивается больше времени и ресурсов. Несмотря на это, скорость выполнения БПФ на ПЛИС на порядки превышает скорость программной реализации на СП. В настоящее время для ПЛИС также существует ряд библиотек - как свободных, так и распространяемых самими производителями ПЛИС. Главные производителями ПЛИС являются фирмы Xilinx и Altera. Altera для своих продуктов предлагает ядро FFT MegaCore, а Xilinx LogiCORE IP Fast Fourier Transform (таблица 3). Как видно из таблицы 3, функциональные возможности у обоих ядер примерно одинаковы. Время преобразования приводится для ПЛИС среднего класса Xilinx - Spartan 6 и Altera - Cyclone III. Время преобразования для 65536 точек не приводится, но можно аппроксимировать время, умножив время преобразования 32768 точек на 4, что не должно превышать 4 мс.
Таблица 3
Характеристики ядер БПФ
|
Характеристики |
FFT MegaCore |
Fast Fourier Transform |
|
Длина преобразования |
64-65536 |
8-65536 |
|
Фиксированная точка |
да |
да |
|
Плавающая точка |
да |
да |
|
Разрядность, бит |
8-32 |
8-34 |
|
Время преобразования для 4096 точек, мкс |
90,89 |
115,30 |
|
Время преобразования для 32768 точек, мкс |
не приводится |
956,35 |
Рецензенты:
Бабич М.Ю., д.т.н., главный специалист ОАО «НПП «Рубин», г. Пенза;
Бутаев М.М., д.т.н., профессор, ученый секретарь НТС ОАО «НПП «Рубин», г. Пенза.