


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
REVIEW AND ANALYSIS OF THE SIMULATION TOOL

Введение. Имитационное моделирование – это метод исследования, при котором изучаемая система заменяется моделью, с достаточной точностью описывающей реальную систему, и с ней проводятся эксперименты с целью получения информации об этой системе. Быстрое развитие информационных технологий и ее роль в управлении процессами сделали область информационных технологий катализатором управленческого прогресса. В России предпринимаются методы, направленные на развитие и превращение страны в современное высокотехнологичное государство. Мировая практика принятия сложных управленческих решений в различных системах перешла на новый уровень, когда те или иные варианты возможных решений должны быть предварительно опробованы на моделях. В связи с этим принимаемые решения или инновации требуют предварительных оценок возможных результатов при помощи системного анализа и имитационного моделирования. Этим и объясняется актуальность данного исследования.
В качестве средств имитационного моделирования могут служить:
1) языки программирования высокого уровня [1; 2];
2) системы имитационного моделирования (GPSS, SIMULA, SIMSCRIPT, специализированные ППП) [1].
Языки программирования высокого уровня (ЯПВУ) – FORTRAN, ALGOL, PL-1, PASCAL, BASIC почти не имеют ограничений при использовании для задач моделирования. Так что они могут применяться неограниченно, независимо от свойств и структуры системы (дискретная/непрерывная). Но они не содержат никакой языковой поддержки для решения задач моделирования. Поэтому их применение для создания имитационных моделей нецелесообразно вследствие больших затрат машинного времени, а также времени разработки самой модели.
Возрастающее значение моделирования привело к разработке различных специальных языков моделирования. Большинство из них развилось из ЯПВУ (таблица 1).
Таблица 1.
Развитие языков моделирования из ЯПВУ.
|
Концепция развития |
Исходный язык |
Развитие |
|
С помощью языковых элементов, ориентированных на моделирование. Например, очереди, события и т.д. |
FORTRAN |
SIMSCRIPT |
|
ALGOL |
SIMULA |
|
|
С помощью процессора и/или пакетов подпрограмм для реализации специфических функций моделирования |
FORTRAN |
GASP |
|
PL-1 |
DESPL-1 |
|
|
FORTRAN |
GPSS |
Очень незначительное число языков моделирования возникло независимо от структур ЯПВУ, например NGPSS, SIAS, FLSIM, HOSPSIM.
Так как производственный процесс является дискретным, то ограничимся только рассмотрением дискретных систем имитационного моделирования.
К настоящему времени имеется около 30 языков дискретного моделирования. Большинство из них повторяют в том или ином виде черты наиболее известных и признанных: GPSS, CSL, SOL, SIMULA, SIMSCRIPT [3].
В каждом языке моделирования предусмотрена своя структура управляющей программы, соответствующая содержанию функциональных блоков модели, и в этом заключается принципиальное различие языков при организации динамического имитационного процесса.
Существуют три подхода к описанию динамики системы:
1) поисковый метод выбора очередного события;
2) использование схемы расписания событий;
3) описание системы на языке взаимодействия параллельных процессов.
Под событием понимается мгновенное изменение состояния некоторого объекта системы. С точки зрения динамики система рассматривается как совокупность связанных друг с другом процессов, причем взаимодействие между ними управляется и координируется совершающимися событиями.
Первый метод применяется в языке CSL (а также в языках AS, GSP). Имитационная программа строится таким образом, чтобы каждый ее блок соответствовал некоторой работе: операция загрузки станка, полная обработка детали на станке, выполнение задачи в вычислительной системе, отдельный этап выполнения машинной команды. Работа описывается программой, состоящей из условия и тела (контрольного и функционального блоков). В контрольном блоке перечислены все условия, при соблюдении которых может быть выполнена программа функционального блока, описывающая необходимые изменения элементов системы. При этом изменения в данных привязываются к так называемому локальному времени, фиксирующему конец данной работы или, другими словами, момент завершения перехода между состояниями ее элементов. Смена же состояний (событие) в любой динамической модели дискретных событий происходит мгновенно. Управляющая программа последовательно просматривает программы всех работ. Если некоторая программа может быть выполнена, то управление передается ее функциональному блоку. Если обращение к функциональному блоку не происходит, управляющая программа продолжает последовательно анализировать все работы, не изменяя системного времени. Преимущество применения поискового метода выбора очередного события состоит в компактности описания модели.
Язык CSL применяется для описания систем с большим числом различных ресурсов. Это язык работ (таблица 2).
Таблица 2
Классификация языков моделирования.
|
Язык |
Классификация |
||||
|
Язык работ |
Язык событий |
Язык процессов |
Императивное управление |
Интеррогативное управление |
|
|
CSL |
+ |
- |
- |
- |
+ |
|
SIMSCRIPT |
- |
+ |
- |
+ |
- |
|
GPSS |
- |
- |
+ |
+ |
+ |
|
SOL |
- |
- |
+ |
+ |
+ |
|
SIMULA |
- |
- |
+ |
+ |
- |
Второй метод реализован в языке SIMSCRIPT (а также GASP и др.). Это язык событий. Модель строится таким образом, что каждый ее блок соответствует событию. Каждый вид события перечисляется в «списке событий», на основании которого автоматически генерируется главная программа – календарь (управляющая программа). Эта программа следит за ходом системного времени и вызывает различные программы событий [5].
Системное время – время возникновения событий в реальной системе. В каждой программе событий содержатся операторы, определяющие смену состояний элементов модели, и операторы, планирующие другие события в некоторые моменты системного времени, в том числе данное событие. События могут наступать в любой момент времени. Когда выполнение определенной программы заканчивается, системное время немедленно приравнивается к моменту времени следующего события, наиболее близкого. Таким образом, при использовании схемы расписания событий удается избежать перебора общего списка событий, за счет чего достигается вычислительная эффективность языка. Но каждому виду событий должна соответствовать отдельная программа. Исходная программа моделирующего алгоритма, написанная на языке SIMSCRIPT, сначала переводится на язык FORTRAN, а затем транслируется в конкретный машинный язык ЭВМ (язык SIMSCRIPT разработан в корпорации RAND для машин фирмы IBM).
Третий метод реализован в языках GPSS, SOL, SIMULA. Этот подход является шагом к объединению вычислительной эффективности языка событий и компактности описания модели на языке работ. Каждый блок соответствует процессу. Процесс характеризуется некоторой структурой данных и правилом действий. Каждый процесс может быть активным на некоторых этапах своего существования в системе и пассивным на других этапах. У процесса может быть несколько точек связи (точек реактиваций) с другими процессами и несколько активных фаз. Динамика системы описывается последовательностью мгновенных событий, причем каждое событие является активной фазой некоторого процесса. Это отличает язык процессов от языков работ и событий.
Некоторая работа или событие может взаимодействовать с другими работами или событиями только после того, как выполнены все относящиеся к ней операции. Программа работы и события начинается с одного и того же выполняемого оператора. Для процесса же существуют точки реактивации, которые определяют те места в программе процесса, с которых надо ее продолжить после выполнения прерывающихся команд типа «задержка», «ждать» и «ждать пока».
Средством формализации динамики системы в этих языках служит элемент потока – транзакт, функциональный цикл которого включает перемещение от одного стационарного блока модели к другому. В языках GPSS и SOL предварительно уже заложено определение таких стационарных устройств, как «средство обслуживания» и «хранилище». В языке SOL, помимо понятия транзакта (процесса), имеется понятие класса процесса.
Очевидно, что для моделирования ГПС и робототехнических систем наиболее удобен подход к описанию динамики системы на языке взаимодействия параллельных процессов. Но необходимо обоснованно выбрать сам язык моделирования для описания системы, так как от него зависит степень выполнения требований, предъявляемых к имитационной модели; адекватно отражать функционирование системы; обладать структурой, подобной моделируемой системе; обеспечивать удобство проведения экспериментов; обладать развитыми средствами сбора, обработки и наглядного представления результатов моделирования.
В качестве основных требований, которым должны удовлетворять языки моделирования ГПС и робототехнических систем, можно указать простоту описания реального времени, наличие развитых средств передачи управления, наличие средств статистической обработки получаемой информации, удобство для создания проблемно- ориентированной надстройки языка.
Имитационное моделирование на стадии проектирования РГПС преследует цели [5]:
- выбор станков и режущего инструмента;
- определение оптимальных условий обработки и стратегии управления станками и промышленными роботами;
- анализ различных вариантов управления перемещением и транспортировкой разрабатываемых деталей;
- синтез конфигурации системы и компоновки РТК, способствующих наиболее эффективной работе ГПС и получению оптимальных характеристик системы.
Для оценки альтернативных вариантов ГПС весь процесс имитационного моделирования можно разделить на два уровня. На первом осуществляется грубая оценка характеристик: различные варианты РТК, скорости обработки, время ожидания деталей и транспортирования. Это моделирование на макроуровне.
Для этого типа информации составляется относительно обобщенная модель, которая действует в соответствии с производственной программой, позволяет выявить основные и характерные особенности исследуемой ГПС.
На микроуровне для определения требований к оборудованию, а именно количества транспортеров, тележек, проблемы узких мест, требуются более детализированные имитационные модели. На выходе у них должна быть информация, необходимая проектировщику для разработки конкретной стратегии управления, для оптимизации характеристик системы. Такая имитационная модель требует гораздо больше времени, а моделирование охватывает всего несколько дней или недель. Поэтому в данном случае, когда это возможно, составляют аналитическую модель.
При моделировании на макроуровне опираются на теорию массового обслуживания, используемую для получения характеристик устойчивого состояния системы. Последние включают в себя среднюю скорость обработки, показатели использования основного и вспомогательного оборудования. Эта информация обеспечивает проектировщику быструю оценку характеристик системы перед тем, как производить более детальное имитационное моделирование. Если результаты не удовлетворительны, то изменяется проект ГПС. В достаточно короткий срок можно сравнить альтернативные варианты системы. Если проект эффективен, то он далее исследуется с помощью микроуровня. Моделирование на микроуровне позволяет выявить все недостатки, которые не обнаружились при оценке системы на макроуровне [5].
Различают системы имитационного моделирования общего назначения, которые, тем не менее, могут применяться для создания ИМ ГПС и РТС, и специализированные пакеты прикладных программ (ППП).
Наиболее распространенными общецелевыми дискретными системами (языками) имитационного моделирования взаимодействия параллельных процессов являются SIMULA и GPSS .
Применение того или иного специализированного ППП зависит от конкретной задачи моделирования ГПС и РТК. Среди общецелевых систем имитационного моделирования язык GPSS наиболее полно удовлетворяет предъявляемым к языкам моделирования ГПС и РТС требованиям.
Имитационная модель функционирования транспортных систем участков станков с ЧПУ разработана В.Н. Брюхановым [2]. Моделируемая система представлена на рис. 1. Моделирование процесса функционирования участка заключается в имитации прохождения деталей по станкам, транспортной системе, контрольным машинам и другим агрегатам участка в соответствии с маршрутами обработки, запуском деталей на участок и организацией работы транспортной системы.
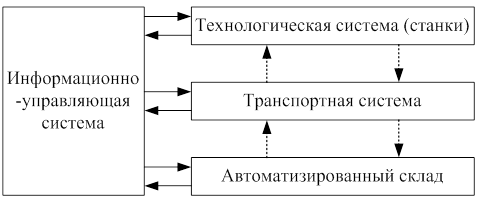
Рис. 1. Имитационная модель В.Н. Брюханова
![]() информационные сигналы;
информационные сигналы;
![]() материальные потоки.
материальные потоки.
В основу построения модели участка положен универсальный модуль «агрегат», моделирующий работу любого агрегата участка, т.к. последний выполняет одни и те же функции с точки зрения временных затрат: прием детали, временное хранение, обработку, хранение после обработки, передачу другому агрегату. Отличие агрегатов друг от друга заключается только в числовых характеристиках и структурных признаках по передачам. Имитационная модель составлена на языке ФОРТРАН-1У.
Моделирование при проектировании РГПС преследует различные цели: выбор структуры и параметров системы, подсистем и устройств, определение значения параметров, в наибольшей степени влияющих на показатели качества системы; исследование проектируемой системы при различных задающих и возмущающих воздействиях; определение чувствительности системы к отказу тех или иных ее составляющих и т.д. [3].
При имитационном подходе построения моделирующего алгоритма структура его зависит от математической модели, но язык моделирования формально не использует математическую модель ГПС, а оперирует с ее содержательным описанием. Фактически же математическая модель присутствует как бы внутри языка.
Аналитическая модель использует явно математические зависимости, связывающие искомые характеристики с начальными условиями, параметрами и переменными.
Выводы
Систему имитационного моделирования для проектирования РГПС необходимо строить на основе системного подхода.
В качестве основных требований, которым должны удовлетворять языки моделирования РГПС, являются простота описания реального времени, наличие развитых средств передачи управления, наличие средств статистической обработки получаемой информации, удобство для создания проблемно-ориентированной надстройки языка.
В создании систем имитационного моделирования, эксплуатируемых в составе математического обеспечения ГПС, можно условно выделить два направления. Первое связано с использованием какой-либо универсальной системы моделирования с программной надстройкой, имитирующей диалог на профессиональном языке пользователя. Второе направление связано с созданием сравнительно жестких модульных систем имитационного моделирования с высоким уровнем структурного подобия моделируемому объекту.
Рецензенты:
Веселов О.В., д.т.н., профессор кафедры «Мехатроника и электронные системы автомобилей» ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир.
Сергеев А.Г., д.т.н., профессор кафедры «Управление качеством и техническое регулирование» ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир.
Библиографическая ссылка
Баландина Е.А., Тимошенко С.В. ОБЗОР И АНАЛИЗ СРЕДСТВ МОДЕЛИРОВАНИЯ // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/en/article/view?id=13178 (дата обращения: 27.06.2026).