


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
THE TECHNOLOGICAL PARAMETERS OF PONTON EXCAVATOR WORK DURING SCOOPING OUT OF THE WATER

При разработке обводненных месторождений твердых полезных ископаемых горнодобывающие предприятия несут значительные затраты на: приобретение и поддержание оборудования для водоотлива; непосредственно водоотлив; возведение и эксплуатацию гидротехнических сооружений, нарушая большие площади земель, необходимые для размещения гидротехнических сооружений.
В целях сокращения затрат предлагается вести горные работы из-под воды, исключая процессы водоотлива и затапливая карьерное поле. Для отработки затопленного карьерного поля предлагаются технологические схемы разработки одним уступом экскаватором на понтоне [3].
Высота уступа при работе гидравлических экскаваторов определяется графическим методом с учетом траектории движения ковша [4, п. 50]. В отличие от гидравлических экскаваторов, работающих на твердом основании, высота уступа гидравлического экскаватора, установленного на понтоне, должна быть меньше на величину колебания уровня воды в карьере.
Для определения оптимальной высоты уступа (верхнего подуступа) и шага передвижки экскаватора, при которых достигается минимальное количество передвижек и максимальный объем выемки горных пород с одного места стояния, была принята возможная зона выемки экскаваторов согласно техническому паспорту оборудования. В качестве примера были взяты экскаваторы Liebherr P996 Aqua Digger, Liebherr R 982 LC, Aqua Digger Demag H185S и Liebherr P995 [1; 2; 5].
Оптимальная высота уступа и шаг передвижки, при которых достигается максимальная площадь выемки с одного места стояния, для вышеперечисленных экскаваторов указаны в таблице 1.
Таблица 1. Технологические параметры схемы отработки уступа (верхнего подуступа)
|
Параметры |
Условные обозначения |
Модель экскаватора |
|||
|
Liebherr P996 Aqua Digger |
Liebherr R 982 LC |
Aqua Digger Demag H185S |
Liebherr P995 |
||
|
Высота понтона, м |
Т |
3,5 |
2,25 |
3,53 |
3,1 |
|
Осадка понтона, м |
То |
2,7 |
1,4 |
2,7 |
2,0 |
|
Максимальный диаметр валунов (негабаритов, крупных отдельностей) на затопленной площадке, м |
dmax |
0,3 |
0,35 |
0,33 |
0,6 |
|
Принятая высота подтопленной части уступа, м |
Hп |
4 |
4 |
4 |
4 |
|
Оптимальная высота верхнего подуступа, м |
Ну |
9,5 |
6,7 |
7,7 |
8,8 |
|
Принятая высота подтопленной части уступа, м |
Hп |
19,4 |
7,5 |
20,7 |
8,6 |
|
Оптимальная высота уступа, м |
Ну |
22,9 |
12,7 |
24 |
13,7 |
Минимальная глубина в забое экскаватора:
![]() (1)
(1)
где dmax – максимальный диаметр валунов (негабаритов) на затопленной площадке, м; 0,5 – минимальный зазор для безопасного передвижения экскаватора на понтоне.
Минимальная высота подтопленной части уступа:
![]() (2)
(2)
где То – глубина осадки понтона, м.
Рассмотрим более детально технологическую схему отработки уступа (подуступа), показанную на рисунке 1.
Величина максимального шага передвижки экскаватора в зависимости от высоты уступа показана в таблице 2.
Таблица 2. Изменение максимального шага передвижки экскаватора в зависимости от высоты уступа
|
Высота уступа, м |
Шаг передвижки экскаватора, м |
Эмпирические коэффициенты |
|
Liebherr P995 |
||
|
1 ≤ Ну ≤ 8 |
|
a= 8,29, b= 0,37 |
|
8 < Ну < 13,7 |
|
c=-7,18, d=32,27 |
|
13,7 ≤ Ну ≤ 2 |
|
z=402,66, f=-0,26 |
|
Liebherr P996 Aqua Digger |
||
|
1 ≤ Ну ≤ 6 |
|
a= 8,39, b= 0,5 |
|
6 < Ну ≤ 16 |
|
c=6,19, d=8,72 |
|
16 < Ну < 22,9 |
|
k=0,24, l=-10,34, m=128,29 |
|
22,9 ≤ Ну ≤ 39 |
|
z=2501,1, f=-0,22 |
|
Liebherr R 982 LC |
||
|
1≤ Ну ≤ 3 |
|
a= 6,68, b= 0,46 |
|
3 < Ну ≤ 5,5 |
|
c=3,09, d=7,58 |
|
5,5 < Ну ≤ 9 |
|
k=0,35, l=-0,57, m=33,74 |
|
9 < Ну ≤ 12,7 |
|
|
|
12,7 < Ну ≤ 22 |
|
z=1677,8, f=-0,39 |
|
Aqua Digger Demag H185S |
||
|
1 ≤ Ну ≤ 3 |
|
a= 8,47, b= 0,4 |
|
3 < Ну ≤ 15 |
|
c=6,53, d=5,53 |
|
15 < Ну ≤ 20 |
|
k=0,07, l=-3,14, m=53,6 |
|
20 < Ну ≤ 24 |
|
|
|
24 < Ну ≤ 42 |
|
z=1268,4, f=-0,17 |
При работе экскаватора на максимальную глубину черпания имеют место межшаговые потери на нижнем подуступе, в виде треугольника с вогнутыми сторонами (рис. 1, более подробно межшаговый целик показан на рис. 2, 3). На площадь поперечного сечения межшагового целика влияет величина шага передвижки понтонного экскаватора и глубины черпания экскаватора.
Площадь поперечного сечения межшагового целика:
![]() (3)
(3)
где SΔ – площадь треугольника потерь, м2.
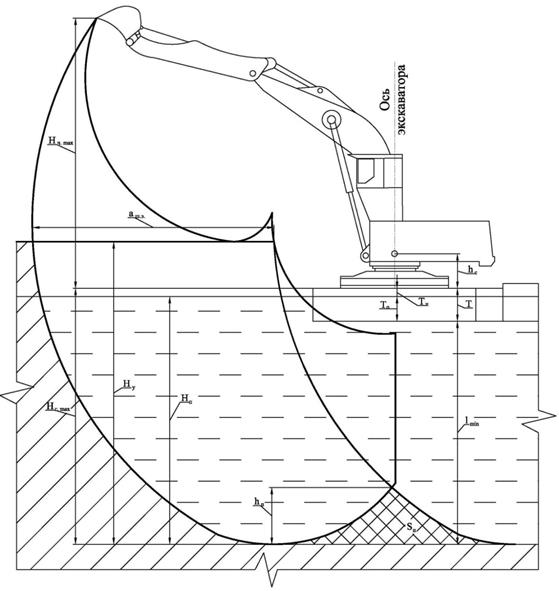
Рис. 1. Схема отработки верхнего подуступа (на примере экскаватора Liebherr P996 Aqua Digger): Hy – высота уступа, м; Нч.max – максимальная высота черпания, м; Нг.max – максимальная глубина черпания, м; Нп – высота подтопленной части уступа, м; Тн – высота надводной части понтона, м; T – высота понтона, м; hп – высота межшагового целика, м; hс – высота крепления стрелы экскаватора от понтона, м; аш.э. – шаг передвижки экскаватора, м
![]() (4)
(4)
Высота межшагового целика (рис. 3):
![]() (5)
(5)
где p, λ – эмпирические коэффициенты, зависящие от модели экскаватора (табл. 3).
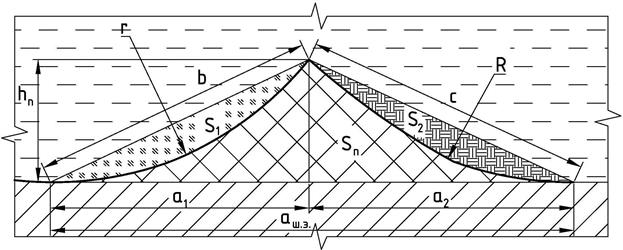
Рис. 2. Межшаговый целик: S1 – площадь первого сегмента, м2; S2 – площадь второго сегмента, м2; r, R – радиусы первого и второго сегментов, м; b, c – длина хорды первого и второго сегментов, м; a1, а2 – длина проекции хорд на горизонтальное основание, м
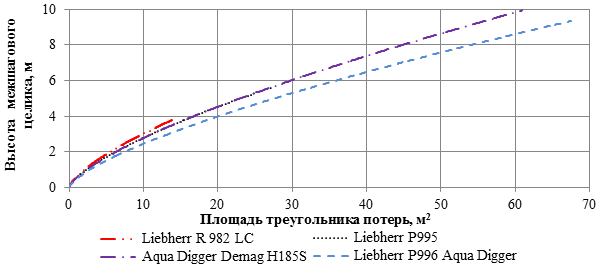
Рис. 3. Изменения высоты целика межшаговых потерь
Таблица 3. Эмпирические коэффициенты, зависящие от модели экскаватора
|
Экскаватор |
Значение коэффициентов |
|
|
p |
λ |
|
|
Liebherr P995 |
0,5583 |
0,6992 |
|
Liebherr P996 Aqua Digger |
0,491 |
0,6994 |
|
Liebherr R 982 LC |
0,6126 |
0,6933 |
|
Aqua Digger Demag H185S |
0,5486 |
0,7047 |
![]() (6)
(6)
![]() (7)
(7)
где γ1, γ 2 – угол первого и второго секторов (образующих сегменты с радиусами r и R), град.
![]() (8)
(8)
![]() (9)
(9)
Для определения длины проекции хорды на горизонтальное основание необходимо решить систему уравнений:
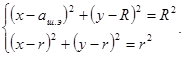 (10)
(10)
Преобразовав систему уравнений, получим:
 (11)
(11)
Далее, подставив данные, решаем квадратичное уравнение, где меньший из получившихся х1 и х2 будет равен а1.
![]() (12)
(12)
Для исключения потерь высота уступа должна отвечать условию:
![]() (13)
(13)
Также площадь межшагового целика можно уменьшить за счёт уменьшения глубины черпания (рис. 4).
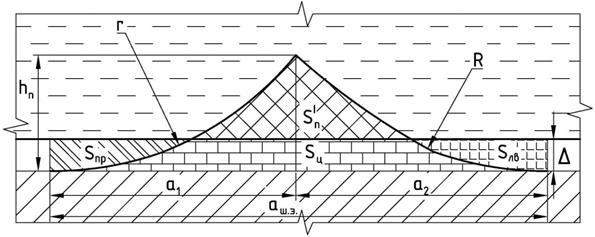
Рис. 4. Уменьшение межшагового целика: Δ – величина уменьшения глубины черпания, м; Sц – площадь сокращения потерь, м2; Sпр, Sлв – площади сегментов горного массива, м2
При уменьшении глубины черпания площадь межшагового целика определится:
![]() (14)
(14)
Общая площадь целика горной массы ниже принятого уровня черпания:
![]() (15)
(15)
где Sг – общая площадь целика горной массы принятого уровня черпания, м2.
![]() (16)
(16)
Площади сегментов горного массива:
 (17)
(17)
 (18)
(18)
Объем выемки горных пород с одного места стояния экскаватора при работе одним уступом:
![]() (19)
(19)
При уменьшении глубины черпания объем выемки горных пород с одного места стояния экскаватора:
![]() (20)
(20)
где L – длина кромки забоя в плане на расстоянии, равном половине шага передвижки, м (рис. 5).
![]() (21)
(21)
где α – угол поворота экскаватора в заходке при ее отработке, град; Rз – расстояние от оси экскаватора до середины отрабатываемой заходки.
![]() (22)
(22)
где Rч.max – максимальный радиус черпания экскаватора, м.
Объем потерь:
![]() (23)
(23)
Максимальный шаг передвижки при оптимальной высоте уступов (табл. 1) составил: Liebherr P996 Aqua Digger аш.э.=18 м, Liebherr R 982 LC аш.э.=10 м, Aqua Digger Demag H185S аш.э.=20,6 м и Liebherr P995 аш.э.=13,6 м.
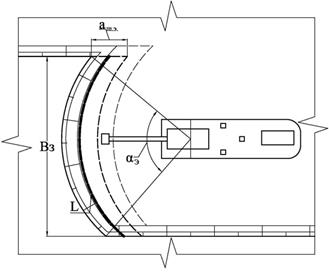
Рис. 5. Вид заходки экскаватора на понтоне в плане
Например, для экскаватора Liebherr P996 Aqua Digger при отработке месторождения одним уступом высотой 22,9 м и высоте подтопленной части 19,4 м шаг передвижки составит 18 м, отсюда площадь межшагового целика 24,5 м2 и высота целика 4,6 м. Тем самым, чтобы исключить потери высота уступа, должно выполняться условие Ну≤ 18,3 м. Также при максимальном радиусе черпания 27,5 м и угле поворота экскаватора 110 градусов Rз=18,5 м, L=35,5 м и объем, вынимаемый гидравлическим экскаватором с одного места стояния, составит 14633,1 м3, а потери 869,8 м3. При исключении потерь объем, вынимаемый гидравлическим экскаватором с одного места стояния, составит не более 11693,7 м3.
Таким образом, представленные технологические схемы позволяют вести отработку обводненных месторождений из-под воды, исключая процесс водоотлива или снижая его объемы при частичном затоплении карьерного поля.
Рецензенты:
Гилёв А.В., д.т.н., профессор, заведующий кафедрой «Горные машины и комплексы», Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Сибирский федеральный университет» Институт горного дела, геологии и геотехнологий, г. Красноярск.
Анушенков А.Н., д.т.н., профессор, заведующий кафедрой «Подземная разработка месторождений», Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Сибирский федеральный университет» Институт горного дела, геологии и геотехнологий, г. Красноярск.
Библиографическая ссылка
Кисляков В.Е., Никитин А.В., Гузеев А.А. ТЕХНОЛОГИЧЕСКИЕ ПАРАМЕТРЫ РАБОТЫ ПОНТОННОГО ЭКСКАВАТОРА ПРИ ЧЕРПАНИИ ИЗ-ПОД ВОДЫ // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/en/article/view?id=13064 (дата обращения: 17.05.2026).