


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
INFORMATION SYSTEMS COORDINATED TRAFFIC MANAGEMENT

Введение. Управление дорожным движением в двухмерных сетях принято называть сетевым управлением. В этих случаях простая логика управления, подобная случаям магистрального управления, часто неприменима [1-2].
В общем случае существуют два метода определения управляющих параметров - выбор программ управления: выбирается одна из заранее подготовленных программ (наборов параметров) в соответствии с измеренными или предсказанными параметрами условий движения; генерация программ: оптимальные параметры вычисляются в масштабе времени, близком к реальному согласно измеренным параметрам условий движения.
При сетевом управлении в сложных дорожных сетях предпочтителен, конечно, метод генерации программ, а при использовании метода выбора программ необходимо подготовить возможно большую их совокупность. Поэтому наиболее часто в качестве центрального контроллера в случае сетевого управления используют ЭВМ. Система управления светофорной сигнализацией состоит из: а) управляющего вычислительного комплекса (УВК); б) линий связи и блоков управления передачей информации; в) местных контроллеров; г) детекторов транспорта; д) мнемосхемы для операторов системы [1; 3; 4]. Рассмотрим их подробно:
а) управляющий вычислительный комплекс (УВК). Функциональные требования к ЭВМ, используемые для управления светофорной сигнализацией, аналогичны требованиям в других системах реального масштаба времени. УВК выполняет обычно в реальном масштабе времени такие операции, как сбор информации о параметрах транспортных потоков, определение стратегии управления и переключение светофорной сигнализации. Вне реального масштаба времени выполняется обработка статистической информации о движении транспорта, оценка стратегий управления методами имитационного моделирования и т. д. [5].
Существуют два типа архитектур УВК, используемых для этих целей: централизованная или параллельная архитектура; иерархическая архитектура.
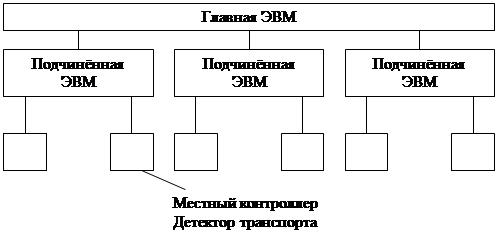
Рисунок 1 - Параллельная структура системы
В первом случае сигналы светофоров управляются одной ЭВМ или множеством ЭВМ, работающих параллельно, как это показано на рисунке 1. В иерархической системе, с другой стороны, одна главная вместе с одной или несколькими подчиненными ей ЭВМ управляет светофорной сигнализацией, как это показано на рисунке 2.
В общем случае операции, выполняемые УВК в процессе управления светофорной сигнализацией, могут быть разделены на две категории. Первая категория содержит те операции, которые требуют сложной обработки информации, такие как определение стратегии управления, в то время как вторая включает совокупность простых операций в реальном масштабе времени, таких как обработка сигналов на выходах детекторов транспорта и переключения сигналов светофоров [1; 6; 7].
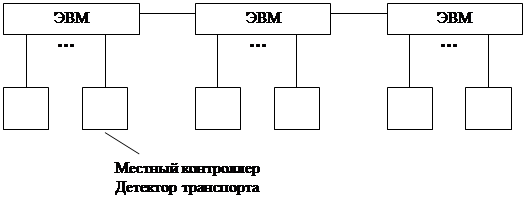
Рисунок 2 – Иерархическая структура системы
В этом случае загрузка УВК распределяется в правильном соответствии с возможностями технических средств управления дорожным движением;
б) линии связи и блоки управления передачей информации. Передача информации от ЭВМ к светофорам и от детекторов транспорта к ЭВМ осуществляется по каналам связи. Хотя в давно созданных системах автоматического координированного управления использовались специально проложенные кабельные линии, обычно в больших системах управления с использованием ЭВМ применяются телефонные линии связи как более удобные в эксплуатации;
в) местные контроллеры. Местные контроллеры, устанавливаемые на каждом перекрестке, принимают импульсы переключения фаз регулирования. Хотя такие контроллеры могут быть реализованы с помощью одних стандартных логических модулей, использование ряда дополнительных устройств дает возможность присоединить существующее оборудование перекрестка к системе управления, включающей ЭВМ;
г) детекторы транспорта. Наиболее широко используемыми детекторами транспорта являются индуктивные и ультразвуковые. Обычно желательно определять с помощью детектора транспорта несколько параметров транспортного потока, таких как интенсивность, плотность, скорость, длина очереди и т.д. Однако детектор, который может быть реализован наиболее экономичным способом, может определять только присутствие автомобиля, причем этот параметр в дальнейшем преобразуется с помощью ЭВМ [8; 9].
Технологические программы выполняют обработку информации, собранной детекторами, выбирают стратегии управления, переключают сигналы светофоров и т.д.
Поскольку достоинством управления с помощью ЭВМ является его универсальность и совместимость, желательно разделение мониторных и технологических программ на множество функциональных модулей, которое облегчает смену функций, или добавление новых.
П1. Подпрограмма считывания информации с выходов детекторов транспорта. ЭВМ определяет не только число импульсов на выходе детекторов транспорта, но и их длительность, необходимую для подсчета занятости. Определение длительности импульсов выполняется путем периодического сканирования выхода детектора.
Наличие сигнала на выходе означает присутствие автомобиля в зоне действия детектора, а отсутствие сигнала — отсутствие и автомобиля в зоне его действия. Блок-схема подпрограммы сканирования приведена на рисунке 3. Поскольку сама подпрограмма не отсеивает ошибочные изменения состояний, связанные, например, с мгновенными шумами, желательно ввести дополнительную функцию, благодаря которой ненормально короткие интервалы наличия или отсутствия сигнала рассматривались бы как ошибочные. Для этой цели подвергаются изменению длительности интервалов отсутствия сигнала [10].
Количество автомобилей и суммарная ширина импульсов, определяемые данной подпрограммой, преобразуются затем в интенсивность, занятость и другие параметры посредством описанной ниже подпрограммы усреднения.
П2. Подпрограмма усреднения. Информация, полученная с помощью подпрограммы считывания, сглаживается и преобразуется в требуемые параметры транспортного потока, такие как интенсивность движения, занятость, скорость, плотность, степень затора и т.д. Техника усреднения не сводится к единственной подпрограмме, а реализуется множеством программ, подготавливаемых заранее в соответствии с видом информации, необходимой для функционирования остальных программ. Частота их вызова распределена между 100 с и несколькими десятками минут.
ПЗ. Программа нахождения длительности цикла регулирования для основных перекрестков. Длительность цикла регулирования в районе управления определяется величиной интенсивности движения на наиболее загруженном перекрестке. Так как количество перекрестков, которые могут быть наиболее загружены, ограниченно, то вычисление длительности цикла может производиться для заранее заданных перекрестков. Период вызова этой подпрограммы приблизительно равен 5 мин.
П4. Подпрограмма определения района координации. Для определения сдвигов желательно разделить сеть перекрестков на некоторое количество подрайонов и для каждого из них найти длительность цикла. Это позволяет использовать тот факт, что в каждом из районов имеются отличия в интенсивности движения. Подобные подрайоны, в случае если имеются их естественные границы (парк, река, железная дорога и т.д.), могут быть фиксированными.
П5. Подпрограмма выбора метода управления. Методы и критерии управления определяются в зависимости от условий движения. Метод управления определяется для каждого подрайона или основного перекрестка, а стратегия управления назначается в соответствии с выбранным методом. Эта программа вызывается каждые 15…60 мин [1; 5].
П6. Подпрограмма нахождения распределения периодов в цикле на основном перекрестке. Эта подпрограмма определяет распределение периодов в цикле регулирования на основном перекрестке и вызывается приблизительно каждые 5 мин.
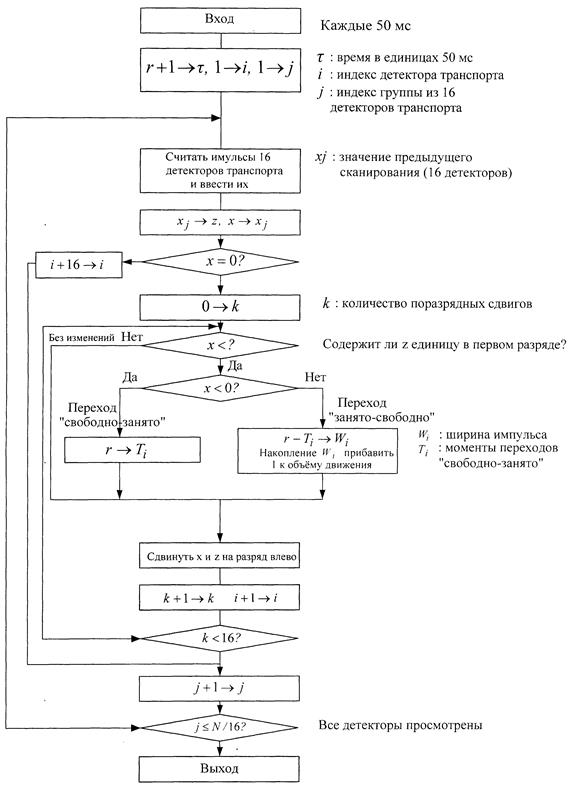
Рисунок 3 – Программа сканирования выходов детекторов транспорта
П7. Подпрограмма нахождения набора распределений периодов в цикле. Данная подпрограмма одновременно определяет распределения периодов в цикле регулирования для всех перекрестков, кроме основных, и также вызывается с периодом, приблизительно равным 5 мин. В этом случае набор сдвигов находится с помощью метода выбора программ, основанного на макроскопической модели транспортного потока, поскольку неэкономично устанавливать детекторы транспорта на всех подходах к каждому перекрестку и отсутствует необходимость точного вычисления сдвигов для всех перекрестков, кроме основных [5].
П8. Подпрограмма формирования дерева. Эта подпрограмма определяет оптимальное дерево, максимизирующее полную сумму эффективности сдвигов в каждом подрайоне.
Блок-схема подпрограммы показана на рисунке 4.
П9. Подпрограмма определения сдвигов. Эта подпрограмма определяет оптимальные сдвиги для каждой дуги, включенной в оптимальное дерево, и вызывается каждые 5 мин.
П10. Подпрограмма динамического управления сдвигами. Подпрограмма оптимизирует сдвиги в динамическом режиме. Начиная с набора сдвигов, определенного подпрограммами П8 и П9, она модифицирует сдвиги в направлении, уменьшающем задержки на основе полученной в реальном масштабе времени информации. Интервал вызова составляет 100~500 с.
П11. Подпрограмма смены сдвигов. Эта подпрограмма определяет оптимальное направление смещения сдвигов от одного набора к другому. Когда набор сдвигов определен методом выбора программ, может быть выполнена выборочная смена сдвигов.
П12. Подпрограмма преобразования сдвигов из относительных в абсолютные. Эта подпрограмма преобразует величины относительных сдвигов, найденные подпрограммами П10 и П11, в набор абсолютных сдвигов.
П13. Подпрограмма формирования расписания переключений сигналов. Эта подпрограмма формирует расписание переключений сигналов светофоров, назначений длительностей цикла, распределений периодов в цикле и сдвигов.
П14. Подпрограмма смены фаз регулирования. Эта подпрограмма определяет (например, каждую секунду) необходимость передачи импульса смены фаз на перекресток на основе расписания, сформированного подпрограммой П13.
Остаток времени горения наличного сигнала светофора на ![]() -м перекрестке уменьшается посекундно до тех пор, пока он не станет равным нулю. В этот момент на перекресток передается импульс смены фаз. Если этот импульс обрабатывать раздельно для каждого перекрестка, то резко снижается эффективность канала ввода-вывода ЭВМ. Вместо этого выполняется следующая процедура. Формируется таблица сигналов смены фаз для всех перекрестков, содержащая единицы для перекрестков, на которых необходимо сменить фазу и нули для остальных; все содержимое таблицы генерируется ЭВМ каждую секунду [6; 7].
-м перекрестке уменьшается посекундно до тех пор, пока он не станет равным нулю. В этот момент на перекресток передается импульс смены фаз. Если этот импульс обрабатывать раздельно для каждого перекрестка, то резко снижается эффективность канала ввода-вывода ЭВМ. Вместо этого выполняется следующая процедура. Формируется таблица сигналов смены фаз для всех перекрестков, содержащая единицы для перекрестков, на которых необходимо сменить фазу и нули для остальных; все содержимое таблицы генерируется ЭВМ каждую секунду [6; 7].
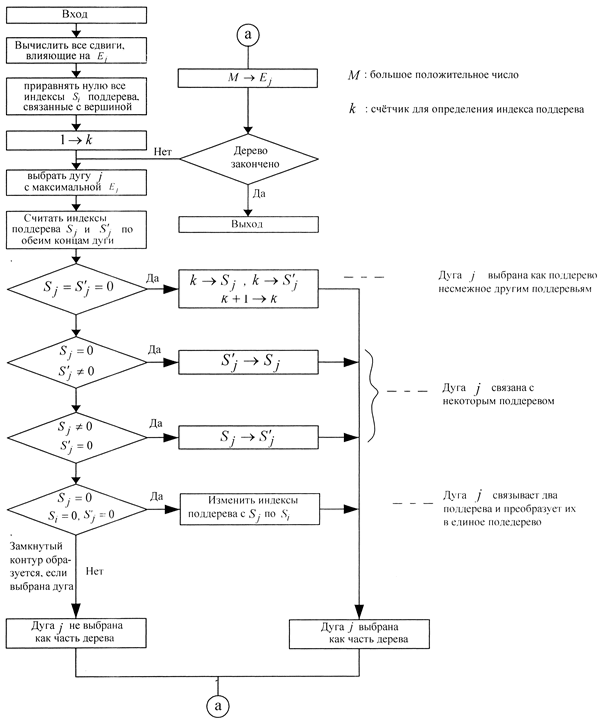
Рисунок 4 – Программа формирования дерева
П15. Подпрограмма управления с адаптацией к транспортному спросу. Эта подпрограмма осуществляет управление на всех перекрестках данной сети, переключения светофоров на которых имеют адаптацию к транспортному случаю. Управление осуществляется путем подготовки раздельных расписаний для каждого перекрестка или путем модификации расписаний, подготовленных подпрограммой П14. Длительность действия зеленого сигнала удлиняется в зависимости от наличия прибывающих автомобилей на второстепенном направлении перекрестка. Оставшееся время действия данной фазы, и ![]() принимает значения от 1 до 4, представляя фазы или такты светофора. Желтый сигнал игнорируется, и в дальнейшем принято, что факт прохождения автомобиля над детектором определяется другой подпрограммой. Импульсы смены фаз генерируются так же, как и в подпрограмме для светофоров, управляемых по жесткой программе [8].
принимает значения от 1 до 4, представляя фазы или такты светофора. Желтый сигнал игнорируется, и в дальнейшем принято, что факт прохождения автомобиля над детектором определяется другой подпрограммой. Импульсы смены фаз генерируются так же, как и в подпрограмме для светофоров, управляемых по жесткой программе [8].
Вывод. Представленные технические средства и программное обеспечение обладают достаточной общностью и могут использоваться для управления дорожным движением в различных отраслях, связанных с эксплуатацией автомобильно-транспортных средств, и в дорожно-проектных организациях при формировании дорожно-транспортной сети и организации движения по ней.
Рецензенты:
Яковлев К.А., д.т.н., доцент кафедры производства, ремонта и эксплуатации машин ФГБОУ ВПО «Воронежская государственная лесотехническая академия», г. Воронеж.
Кондрашова Е.В., д.т.н., профессор кафедры технического сервиса и технологии машиностроения ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж.
Библиографическая ссылка
Скрыпников А.В., Чистяков А.Г., Дорохин С.В., Кривошеева А.В. ИНФОРМАЦИОННЫЕ СИСТЕМЫ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДОРОЖНЫМ ДВИЖЕНИЕМ // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/en/article/view?id=12927 (дата обращения: 29.06.2026).