


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
STEERABLE DIRECT DIGITAL SYNTHESIS ORCAD MODEL

Введение
Технологии прямого цифрового синтеза (DDS – Direct Digital Synthesis) частоты получили широкое распространение и применяются в устройствах формирования и обработки сигналов в самых разнообразных отраслях промышленности [6].
Генераторы сигналов на основе DDS реализуют аппаратными или аппаратно-программными средствами, c использованием: ПЛИС, специализированных микросхем DDS, микроконтроллеров. При этом применяют различные средства моделирования и отладки: компьютерное имитационное моделирование на языке VHDL, макетные платы и отладочные наборы, прикладное программное обеспечение производителей микросхем DDS (например, интерактивный программный инструмент ADIsimDDS компании Analog Devices).
Одновременно с этим существует необходимость, еще на этапе проектирования, оценить влияние аналоговых узлов (фильтров, усилителей и т.п.) на качество работы систем с DDS, в частности радиоэлектронных систем, использующих сложные сигналы [1-4]. Обозначенную задачу удобнее и проще решать с помощью пакетов, имеющих в своем составе средства схемотехнического моделирования, для чего, прежде всего, необходимо сформировать требуемые сигналы.
Сигнал на выходе генератора DDS имеет сложную структуру, в общем случае – это квантованный сигнал (результат работы ЦАП), огибающая которого должна соответствовать заданной форме. Кроме того, в системах радиосвязи и радионавигации форма сигнала зависит от используемого вида модуляции. Построение гибкой аналитической модели такого сигнала, учитывающей разрядность, быстродействие, динамический диапазон ЦАП и закон модуляции несущей, приводит к весьма громоздкому результату.
Наиболее просто получить точную модель сигнала DDS-модулятора можно на основе схемотехнической модели. Одним из лидеров в области схемотехнического моделирования является пакет OrCAD, в состав которого входит большое число инструментов для моделирования как аналоговых, так и цифровых устройств [9].
Актуальной представляется задача синтеза сигнала непосредственно в OrCAD, что предпочтительнее с позиций реализации как можно большего числа этапов проектирования на одной программной платформе и возможности отказа от привлечения иных пакетов программ.
Покажем на примере модели цифрового модулятора MSK-сигналов схемотехническую реализацию алгоритма DDS средствами OrCAD.
MSK-сигналы (Minimum Shift Keying – минимальная частотная манипуляция) можно представить, как частный случай частотно-манипулированных сигналов с непрерывной фазой (ЧМНФ) при индексе манипуляции, равном 0,5. На каждом интервале времени сигнал имеет постоянную огибающую и одну из двух возможных частот ![]() , здесь
, здесь
![]() – центральная частота спектра сигнала, T – длительность элемента модулирующей символьной последовательности. MSK-сигналы находят широкое применение в современных системах радиосвязи и перспективных радионавигационных системах [8].
– центральная частота спектра сигнала, T – длительность элемента модулирующей символьной последовательности. MSK-сигналы находят широкое применение в современных системах радиосвязи и перспективных радионавигационных системах [8].
Структура и параметры модели
Наиболее распространенная [5-7; 10] на сегодняшний день структура DDS гармонического сигнала (рис. 1) включает следующие основные блоки: аккумулятор фазы (накапливающий сумматор), преобразователь выходного кода аккумулятора фазы в коды мгновенных значений амплитуды сигнала (обычно ПЗУ, содержащий таблицу отсчетов сигнала), ЦАП. Описание принципов работы приведенной структуры DDS приведено, например, в [5].

Рис. 1. Структура DDS
Для примера использована структура DDS сравнительно небольшой разрядности. Разрядность ЦАП – 8 бит, тогда в ПЗУ необходимо иметь ![]() отсчетов сигнала. Разрядности адресной (k) и выходной шины (p) ПЗУ также 8 бит. Разрядность аккумулятора фазы составляет 16 бит, таким образом, n – разрядности шин сумматора, регистра и разрядность «кода частоты» - также 16 бит. Тактовая частота DDS – 250 МГц.
отсчетов сигнала. Разрядности адресной (k) и выходной шины (p) ПЗУ также 8 бит. Разрядность аккумулятора фазы составляет 16 бит, таким образом, n – разрядности шин сумматора, регистра и разрядность «кода частоты» - также 16 бит. Тактовая частота DDS – 250 МГц.
Параметры генерируемого сигнала: MSK-сигнал единичной амплитуды, ![]() МГц,
МГц,![]() мкс, тогда верхняя и нижняя частоты сигнала равны соответственно 1,25 МГц и 0,75 МГц, входной модулирующий сигнал – псевдослучайная последовательность (ПСП) [3] структуры М{14, 10, 06, 01}.
мкс, тогда верхняя и нижняя частоты сигнала равны соответственно 1,25 МГц и 0,75 МГц, входной модулирующий сигнал – псевдослучайная последовательность (ПСП) [3] структуры М{14, 10, 06, 01}.
Выходная частота DDS определяется по формуле [5]:
![]() (1)
(1)
где M – «код частоты», модуль счета аккумулятора фазы, ![]() – тактовая частота DDS, n – разрядность аккумулятора фазы.
– тактовая частота DDS, n – разрядность аккумулятора фазы.
В соответствии с (1), «коды частот»: для «верхней» частоты MSK-сигнала – ![]() и
и ![]() – для «нижней» частоты.
– для «нижней» частоты.
Разрешение по частоте составит: ![]() кГц.
кГц.
Конечно, MSK-модулятор, построенный на DDS такой разрядности, будет недостаточно точный для большинства задач связи и радионавигации, и его выходной сигнал будет иметь значительные скачки фазы. Однако использование DDS с описанными параметрами в качестве демонстрационного примера, для компактного представления основной идеи, вполне оправданно.
Реализация модели
Регистр (рис. 2а) в составе аккумулятора фазы построен из двух восьмиразрядных регистров (модель регистра – 74273, библиотека «EVAL»). На входы CLK поступает тактирующая последовательность (сигнал тактовой частоты DDS).
Сумматор (рис. 2б) аккумулятора фаз реализован на стандартных элементах «ADD8» библиотеки «DIG_PRIM». Выход переноса – COUNT, вход расширения CIN.
а 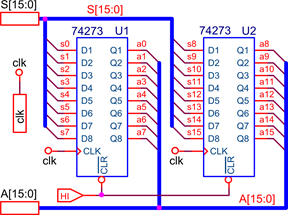 б
б 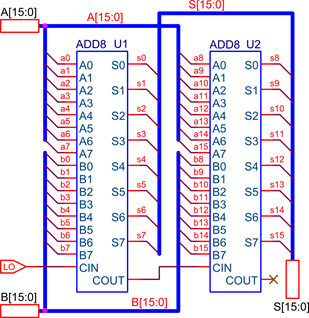
Рис. 2. Шестнадцатиразрядные регистр (а) и сумматор (б) в OrCAD
Вся модель MSK-модулятора на основе DDS показана на рис. 3.
Цифро-аналоговое преобразование реализовано элементом «DAC8break» (на схеме U3) из библиотеки «BREAKOUT», представляющим собой восьмиразрядный ЦАП. Источник V1 задает опорное напряжение ЦАП, а V2 - необходимое смещение для получения двухполярного сигнала (в приведенном примере размах выходного напряжения ЦАП составляет ±1 В).
В качестве элемента памяти DDS-модулятора (на схеме U2) использована модель ПЗУ (элемент «ROM32KX8break», библиотека «BREAKOUT»), которая позволяет считывать значения отчетов колебания либо из HEX-файла, либо непосредственно из spice-модели элемента. Для хранения таблицы с отсчетами использовано 8 бит младших адресов ПЗУ.
Иерархические блоки SUM16 и REG16 (рис. 3) это, соответственно, сумматор и регистр в составе аккумулятора фазы (схемы показаны на рис. 2). Сам аккумулятор имеет 16 разрядов, для адресации к таблице отсчетов использованы 8 старших бит шины. Регистр тактируется синхроимпульсами от источника CLK (элемент «DigClock», библиотека «SOURCE»), частота следования импульсов – 250 МГц (тактовая частота DDS).
Еще один элемент «ROM32KX8break» (на схеме U1) использован для хранения «кодов частот». В ПЗУ занято две 16-битные ячейки, содержащие значение модуля счета аккумулятора фазы для верхней и нижней частоты MSK-сигнала. Для адресации используется 1 бит. Переключением «кодов частот» (сменой адресса в ПЗУ) управляет источник PSP_test (элемент «DigStim», библиотека «SOURCSTM»), считывающий модулирующую символьную последовательность из файла сигнала.
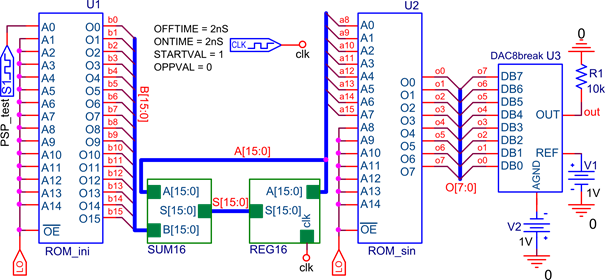
Рис. 3. Шестнадцатиразрядный регистр в OrCAD (символ и модель компонента U1 изменены, увеличена разрядность шины данных)
Ниже представлены результаты симуляции разработанной модели в OrCAD. На рис. 4 показаны диаграммы работы DDS-модулятора в интервале от 20 до 40 мкс.
На вход ПЗУ U1 поступает модулирующая символьная последовательность psp. В соответствии с psp меняется адрес ячейки ПЗУ и на шине данных B выставляется код соответствующей частоты (на рис. 4 сигнал code представлен в десятичном формате). Выходной сигнал модулятора обозначен V(out).
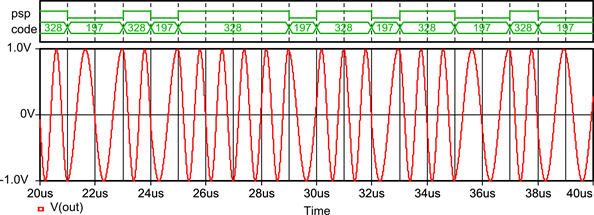
Рис. 4. Диаграммы работы DDS-модулятора (интервал от 20 до 40 мкс)
На рис. 5 показаны диаграммы работы DDS-модулятора в первые 60 нс и спектр MSK-сигнала на выходе DDS-модулятора. Тактирующий сигнал – clk, модулирующая символьная последовательность – psp, сигнал шины B – code, сигнал шины A (полный код фазы) – phase, усеченный код фазы, поступающий на адресную шину ПЗУ U2 – ph_red, с ПЗУ U2 на ЦАП поступают значения амплитуд колебания – DAC, выходной сигнал ЦАП – V(out).
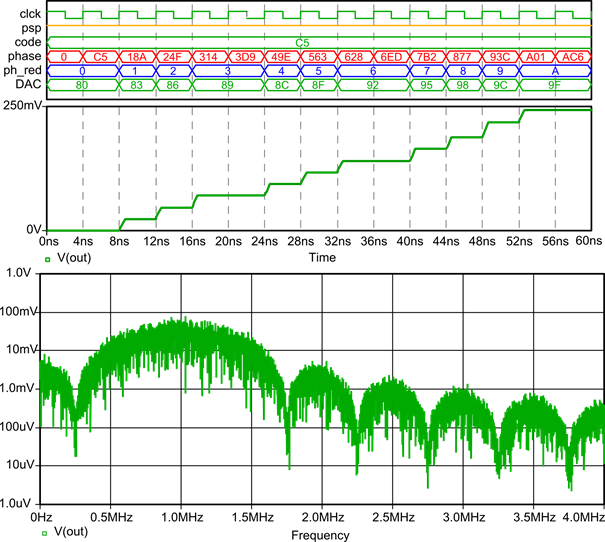
Рис. 5. Диаграммы работы DDS-модулятора (интервал от 0 до 60 нс) и спектр MSK-сигнала на выходе DDS-модулятора
Амплитудный спектр результирующего шумоподобного MSK-сигнала получен в результате симуляции разработанной модели DDS-модулятора. Спектр сигнала получен в программе PSpice A/D, время анализа – 16383 мкс (один период ПСП), максимальный шаг интегрирования – 1 нс.
В заключение отметим, что в PSpice разработчик может менять параметры динамической модели ЦАП, настраивая время установления сигналов на выходах. Кроме того, возможен выбор и настройка моделей цифро-аналоговых интерфейсов с указанием выходной емкости и выходных сопротивлений ЦАП.
Выводы
Разработана и выполнена в системе OrCAD функционально-схемная модель генератора сигналов на основе технологии прямого цифрового синтеза частоты.
Модель реализована на примере модулятора MSK-сигналов и обеспечивает формирование сигналов для исследования их прохождения по различным радиочастотным трактам, используя все возможности аналогово-цифрового моделирования системы OrCAD.
Представленные результаты симуляции свидетельствуют о правильном функционировании разработанной модели.
Функционально-схемная реализация технологии DDS именно в OrCAD дает возможность разработчику изменять параметры сигнала непосредственно в пакете, без обращения к сторонним программным средствам, сокращая тем самым трудоемкость и сроки разработки.
Разработанная модель позволяет получать сигналы, структурно идентичные сигналам на выходе ЦАП реальных DDS-систем.
Модель будет полезна специалистам, решающим конкретные задачи в области разработки радиоэлектронных систем и использующим в своей работе методы и средства схемотехнического проектирования и моделирования. Модель также может использоваться при изучении дисциплин, затрагивающих вопросы цифровой передачи данных, компьютерного моделирования электронных средств.
Работа выполнена при поддержке Министерства образования и науки Российской Федерации в базовой части НИР, выполняемых по государственному заданию в ФГАОУ ВПО «Сибирский федеральный университет».
Рецензенты:
Громыко А.И., д.т.н., профессор кафедры «Инфокоммуникации» ИИФиРЭ ФГАОУ ВПО «Сибирский федеральный университет», г. Красноярск.
Алдонин Г.М., д.т.н., профессор кафедры «Приборостроение и наноэлектроника» ИИФиРЭ ФГАОУ ВПО «Сибирский федеральный университет», г. Красноярск.
Библиографическая ссылка
Кузьмин Е.В., Зограф Ф.Г. МОДЕЛЬ УПРАВЛЯЕМОГО ЦИФРОВОГО СИНТЕЗАТОРА ЧАСТОТ В ORCAD // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/en/article/view?id=12876 (дата обращения: 29.06.2026).