


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
FUNCTIONING ANALYSIS OF COMPUTER-AIDED INTELLIGENT SYSTEM WITH ADAPTIVE ELEMENT

Введение
Важную роль в автоматизации и управлении технологическими процессами в объектах горнодобывающей промышленности играют системы управления. Проблема построения таких систем в настоящее время достаточно актуальна, так как повышение эффективности управления невозможно без использования автоматизированных систем управления (АСУ), основанных на применении информационных технологий и прогрессивных математических моделей управления [4, 10].
Однако современные АСУ буровых станков не позволяют своевременно реагировать на изменение свойств объекта воздействия (горной породы), подстраивать режимы работы и компенсировать возмущения при функционировании сложной технической системы “Буровой станок – шарошечное долото – горная порода” (далее – объект управления или
С-Д-П), что приводит к снижению ее эффективности [5]. Кроме того, в современных АСУ отсутствует возможность принимать решения об изменении параметров при изменяющихся свойствах объекта, а также баз знаний в виде специальных математических моделей, отражающих протекающие в системе информационные процессы, что не позволяет учесть все многообразие и сложность задач, возникающих в процессе функционирования АСУ. Обеспечение заданных требований по оперативности (своевременности) и точности передачи информации является основополагающим условием повышения качества управления объектом и процессом.
Цель настоящей статьи – обосновать необходимость использования в буровых станках автоматизированной интеллектуальной системы (АИС) с адаптивным элементом для увеличения ресурса дорогостоящего бурового инструмента до двух раз, повышения эффективности и удешевления процесса бурения.
Исследуемая АИС позволит своевременно отследить изменение свойств объекта воздействия в процессе функционирования объекта управления (осуществление мониторинга), определить его прогнозируемый ресурс, осуществить корректировки режимных параметров в постоянном режиме, а также обеспечит успешное решение задач при априорной неполноте и нечеткости исходных данных, вариабельности и неточности характеристик исследуемого объекта воздействия.
Применение разработанных методик расчета ресурса, оптимальной производительности и удельных затрат на осуществление технологического процесса, контроль и учет данных рекомендаций позволят повысить эффективность функционирования технической системы С-Д-П и снизить эксплуатационные затраты в условиях непрогнозируемых изменяющихся свойств объекта воздействия и ударных нагрузок [8]. Применение указанных методик необходимо в целях реализации конкретного алгоритма и получения определенного прогнозируемого результата функционирования технической системы.
Управление структурной динамикой сложных технических систем
Перспективным направлением развития искусственного интеллекта стали работы по основам теории управления структурной динамикой сложных технических систем [2, 9-10]. Направление предлагает использовать комплексы с различными моделями, комбинированные методы и алгоритмы, а также разработку интеллектуальной технологии автоматизированного проектирования систем мониторинга и управления сложных технических объектов в различных условиях изменения обстановки.
Процесс мониторинга и управления анализирует переход структуры системы из одного состояния в другое под действием различного рода причин (воздействий внешней среды, конфликтующих систем и т.д.).
Место теории управления структурной динамикой сложных технических систем определяется как интеграция искусственного интеллекта с системным анализом, исследованием операций, теорией управления и теорией систем, т.е. требует междисциплинарных исследований [2]. Концепция проблемы управления структурной динамикой сложных технических объектов сводится к решению следующих основных задач:
- анализ структурной динамики сложной технической системы;
- оценивание структурного состояния системы;
- выбор оптимальных программ управления и регулирования структурной динамики системы.
Для обобщенной интеллектуальной системы обычно используют структуру, которая взаимодействует с внешней средой и в процессе получения от нее необходимой информации формирует цель действия и анализирует воздействия на систему (физические и информационные). Определяющими элементами системы управления в этом случае являются интеллектуальный преобразователь и базовая система управления [3].
В случае использования в системе управления искусственного интеллекта в качестве интеллектуального преобразователя реализуются [3] экспертные системы, ситуационное управление, управление структурной динамикой сложных технологических [2] и других интеллектуальных систем и их элементов.
Математическая модель интеллектуальной системы управления состоит из трех частей:
- интеллектуального преобразователя;
- объекта управления;
- управляющего устройства системы (вычислительных и преобразующих и исполнительных устройств).
Интеллектуальный преобразователь изменяет информацию о внешней среде и объекте управления и трансформирует в сигналы воздействия на управляющие устройства системы [3]. Для формирования воздействий на систему управления объектом в этом преобразователе используется блок принятия решения.
Важнейшим качеством элементов и среды в целом является способность к адаптивным изменениям своего состояния. В достижении адаптивного состояния необходимо иметь в виду, что в случае движения системы под прямым воздействием движущих внешних сил (сигнального воздействия) направление адаптивного движения системы предопределено, а при движении системы под опосредованным влиянием внешних сил требуется периодическое прерывание адаптивного движения для определения направления корректирующего действия.
Функционирование типовой АСУ и АИС с адаптивным элементом
Классическая схема автоматизированной системы управления включает управляемый объект и управляющую систему, находящиеся в некоторой окружающей среде и взаимодействующие друг с другом за счет управляющих и обратных связей [1] (рис. 1).
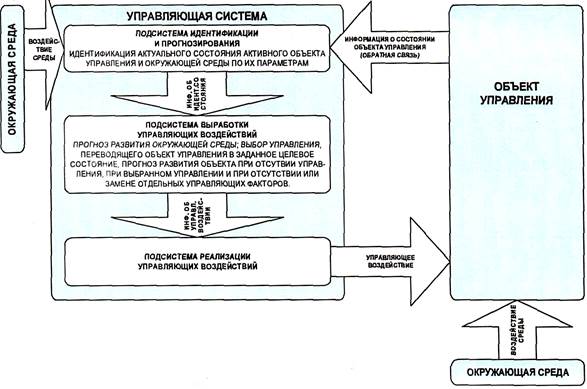
Рис. 1. Структура типовой АСУ
В отличие от приведенной АСУ, которая нашла широкое применение в различных областях промышленности, для автономной работы бурового станка необходимо применение интеллектуальной системы, которая наряду с основными функциями позволяет отслеживать информационный поток об изменяющихся случайным образом свойствах горной породы. Для осуществления на базе бурового станка интеллектуального автоматизированного управления в аппаратном комплексе системы должен содержаться адаптивный элемент электромагнитного типа, который одновременно сглаживает случайные ударные нагрузки и позволяет получить быстрый обратный сигнал о времени и величине удара. Структурная модель предлагаемой АИС с адаптивным элементом представлена на рисунке 2.
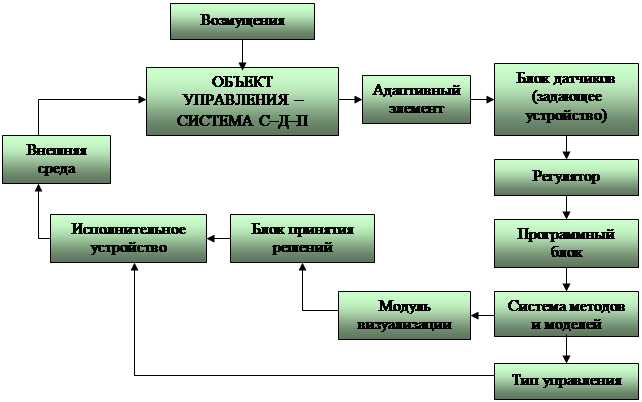
Рис. 2. Структурная модель предлагаемой АИС с адаптивным элементом
Принципиальная схема функционирования предлагаемой АИС представлена на рисунке 3.
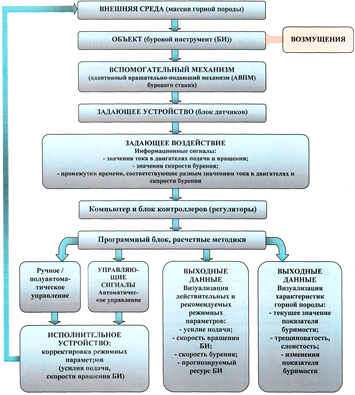
Рис. 3. Принципиальная схема функционирования АИС с адаптивным элементом
Эта система функционирует по следующему алгоритму. Внешняя среда (массив горной породы: свойства буримых пород и их непрогнозируемые изменения) воздействует на процесс функционирования объекта (бурового инструмента) [7]. Данная система предполагает включение адаптивного вращательно-подающего механизма (вспомогательного адаптивного элемента) бурового станка [6], блока датчиков, компьютера и блока контроллеров. На объект также воздействуют возмущения, не зависящие от системы управления: ударная нагрузка (причина изменения режима работы бурового станка), помехи (вибрации, уровень запыленности, температура, ошибки приборов, сбой в системе управления). Данный адаптивный элемент позволяет сглаживать эти непрогнозируемые возмущения.
Для анализа входной информации об изменении физико-механических характеристик горной породы датчики (задающее устройство) посылают в компьютер информационные сигналы об изменениях скорости бурения и тока в статоре адаптивного механизма (задающее воздействие). В компьютере эти информационные сигналы преобразуются в управляющие (информацию о действительных характеристиках горной породы и режимных параметрах) при помощи блока контроллеров (регуляторов, управляющих устройств), предназначенных для сглаживания кратковременных отклонений и реализации процесса управления и программного блока, который содержит разработанные расчетные методики (реализация алгоритма управления). Затем управляющие сигналы направляются к исполнительному устройству, реализующему принятое решение и способствующему изменению соответствующих режимных параметров (автоматическое регулирование). По этим методикам определяется прогнозируемый ресурс бурового инструмента и удельные затраты на бурение, соответствующие действительным значениям режимных параметров и свойств породы. Из этой же информации определяются оптимальная скорость бурения и режимные параметры (выходные данные). Для улучшения качественных характеристик системы действительные значения сравниваются с оптимальными и автоматически изменяются с помощью корректирующих устройств.
По обратной связи осуществляется быстрая передача информации (сотая доля секунды) о текущих режимных параметрах объекта управления от объекта управления к управляющей части. После корректирующих воздействий адаптивный вращательно-подающий механизм работает во вновь заданных режимах и осуществляет подачу и вращение бурового инструмента с необходимым усилием и скоростью. Буровой инструмент проходит сквозь массив горной породы с заданной скоростью до очередного изменения характеристик горной породы. Расчетные значения выводятся на приборную панель с помощью модуля визуализации, предназначенного для демонстрации результатов моделирования и последующего контроля оператора.
Заключение
Подводя итог, можно отметить необходимость использования в буровых станках АИС с адаптивным элементом для быстрого своевременного реагирования системы на изменение свойств объекта воздействия и последующей корректировки и поддержания параметров функционирования объекта управления в оптимальном соотношении.
В дальнейшем, применение такой АИС позволит снизить эксплуатационные затраты на процесс бурения в условиях неопределенности и, как следствие, повысить эффективность функционирования технической системы.
Рецензенты:
Гилев А.В., д.т.н., профессор, зав. кафедрой «Горные машины и комплексы» ФГАОУ ВПО «Сибирский федеральный университет», г. Красноярск;
Антамошкин А.Н., д.т.н., профессор, профессор кафедры системного анализа и исследования операций ФГБОУ ВПО «Сибирский государственный аэрокосмический университет имени академика М.Ф. Решетнева», г. Красноярск.
Библиографическая ссылка
Шигина А.А., Ступина А.А., Шигин А.О. АНАЛИЗ ФУНКЦИОНИРОВАНИЯ АВТОМАТИЗИРОВАННОЙ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ С АДАПТИВНЫМ ЭЛЕМЕНТОМ // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/en/article/view?id=12783 (дата обращения: 29.06.2026).