


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
SYNCHRONIZATION OF TRAFFIC LIGHT INTERSECTIONS IN THE CONDITIONS OF THE SATED MOVEMENT

Введение
Насыщенность городских транспортных сетей автомобильным движением ставит задачу недопущения возникновения транспортных заторов на улично-дорожной сети. В большинстве современных автоматизированных систем управления дорожным движением (АСУДД) имеются соответствующие инструменты, реализующие следующие стратегии управления:
- нормирование въезда в зону затора;
- предоставление приоритета в выбранных направлениях;
- предотвращение блокирования направлений.
Рассмотрим подробнее реализацию управления насыщенными транспортными потоками в современных АСУДД. Наибольшую известность имеет АСУДД SCOOT (Split Cycle Offset Optimization Technique), осуществляющая централизованную стратегию управления движением. SCOOT реагируя на флуктуации транспортного спроса в режиме реального времени путем внесения малых регулярных изменений в сигнальные планы с целью минимизации индекса качества PI (performance index) для всей сети [1, 3]. В SCOOT используется трех стадийная процедура оптимизации, устанавливающая в отдельности длительность цикла, его разбиения между фазами и смещения. В условиях насыщенного движения в SCOOT используется несколько методов управления:
- смена значимости фактора загрузки транспортных связей;
- смена коэффициентов значимости транспортной связи при ее перегрузке;
- нормирование и смена переменных целевой функции оптимизации длительности цикла.
Фактор значимости загрузки определен для каждой связи. Он используется для воздействия на оптимизацию разбиения в пользу связи, на которой обнаружен затор. Стратегия нормирования въезда позволяет уменьшить время разрешающего сигнала на входах к участку затора и тем самым его ликвидировать. Смещение при заторе является фиксированным смещением, определенным экспертно инженером и используется в условиях заторов.
Оптимизатор цикла в качестве целевой функции обычно обеспечивает уровень 90%-го насыщения. Могут быть установлены отличные от базового целевые уровни насыщения, что позволяет при снижении порогового значения увеличить длительность цикла, а при увеличении – обеспечить более раннее понижение длительности цикла в конце пикового периода.
Определённый интерес представляет система MOTION (Method for the Optimization of Traffic Signals In On-line controlled Networks). Для управления в условиях заторов она использует экспертную систему [1, 3]. Ее задачей идентифицировать транспортную ситуацию и применить заранее разработанную стратегию управления. В общей сложности MOTION может использовать до двенадцати стратегий управления. Для случаев возникновения заторов характерными являются следующие.
Tactic I – Задерживание на входе. На основании транспортно-технического анализа по следующим критериям выбираются узлы для приложения управляющих воздействий:
- узел в направлении наибольшего потока на входе в область;
- задержка в узле не будет иметь негативных экологических последствий для данной области;
- узел не окажет отрицательного влияния на транспортный поток в соседней области.
Если транспортные условия или их комбинация удовлетворяет предварительно заданным логическим правилам, в выбранных узлах устанавливается укороченный разрешающий сигнал. Если транспортные условия улучшились настолько, что логические условия не выполняется, новое значение длительности разрешающего сигнала рассчитывается MOTION, как в свободных условиях. Ситуация повторно оценивается каждые 15 минут.
Tactic III – Предотвращение блокировки поперечных направлений. Данная стратегия используется для того, чтобы воспрепятствовать возникновению очередей на перегоне между транспортными узлами, в результате чего ограничивается вероятность блокировки поперечных направлений. Стратегия реализуется путем согласования значений длительности разрешающего сигнала и временного сдвига двух соседских узлов таким образом, чтобы интенсивность движения не превышала пропускную способность перегона между этими узлами.
Практика показала, что наилучших результатов можно добиться ручной установкой параметров временного сдвига. При этом учитывается геометрия улиц и узлов (перекрестков), направление и интенсивность транспортных потоков. Поэтому при использовании Tactic III параметр временного сдвига устанавливается экспертным способом и корректируется в процессе эксплуатации в зависимости от реальных условий.
Tactic IV – Предоставление преимущества движению в выбранных направлениях. При определении временного сдвига между двумя узлами необходимо определить оптимальный момент включения зеленого сигнала так, чтобы движение транспортных средств в приоритетном направлении начиналось в тот момент, когда очередь начинает двигаться. Так же, как и в случае Tactic III, временной сдвиг рассчитывается заранее, и корректируется в процессе эксплуатации.
Как видим, режимы управления в условиях насыщенного движения рассчитываются заранее и затем корректируются в процессе эксплуатации. Этап подготовки трудоемок и требует значительного опыта транспортных инженеров, при этом наибольшую сложность представляет определение величины сдвига включения разрешающего сигнала.
Методика определения сдвига включения разрешающего сигнала в условиях насыщенных потоков
В основе современных АСУДД, обеспечивающих минимизацию функционала, включающего задержку транспортных средств, лежит модель очереди. В общем случае динамика очереди базируется на представлении регулируемого направления как системы массового обслуживания [2]:
 ; (1)
; (1)
 ; (2)
; (2)
![]() ; (3)
; (3)
 ; (4)
; (4)
гдеА(t) – кумулятивное число прибытий; D(t) – число обслуживаний в течение периода [0,t] при наличии остаточной очереди Q(0); Q(t) – текущее количество транспортных средств в системе; d – средняя задержка транспортных средств, в течение периода [0,T]; .q(t) – интенсивность прибытия транспортных средств; S(t) – интенсивность разъезда транспортных средств.
Графическая интерпретация модели приведена на рис. 1. Следует отметить особенность данной модели, заключающаяся в том, что все прибывающие к пересечению транспортные средства размещаются в стеке на стоп-линии.
В свободных условиях движения данное допущение является приемлемым, но в условиях насыщенных транспортных потоков становится важным не только количество автомобилей в очереди, но и ее пространственно-временные характеристики. Для описания пространственно-временной динамики образования очереди введем следующие обозначения: fin – положение фронта очереди, определяющего точку остановки прибывающих транспортных средств; fout – положение фронта отъезда транспортных средств, определяющего точку отъезда очередного транспортного средства.
При отсутствии остаточной очереди в момент включения запрещающего сигнала формируется очередь, фронт которой в дискретном виде определяется выражением (рис. 2а):
![]() ; (5)
; (5)
где ![]() – положение фронта очереди в текущий момент, м;
– положение фронта очереди в текущий момент, м; ![]() – положение фронта очереди в последующий момент, м;
– положение фронта очереди в последующий момент, м; ![]() – период дискретизации, с; Lvech– средняя длина автомобиля, м;
– период дискретизации, с; Lvech– средняя длина автомобиля, м; ![]() – интенсивность движения, авт/с.
– интенсивность движения, авт/с.
В указанных условиях положение фронта очереди также может быть определено как:
![]() . (6)
. (6)
При включении разрешающего сигнала отъезжающие транспортные средства формируют фронт отъезда (рис. 2б). Скорость его распространения зависит от средней длины автомобилей в потоке и времени задержки начала движения при отъезде впереди идущего автомобиля.
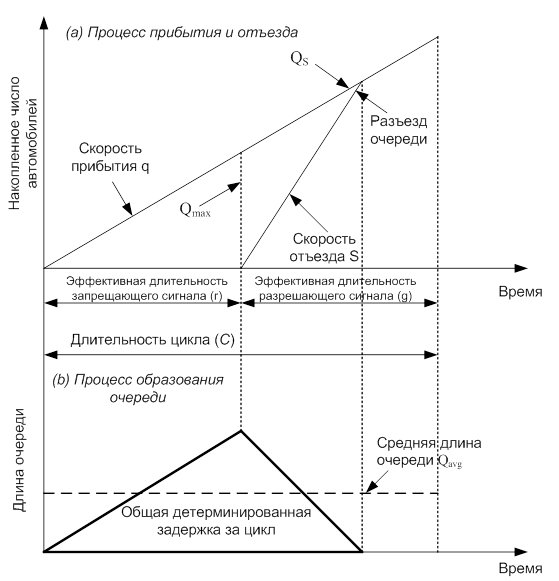
Рисунок 1. Динамика образования очереди в свободных условиях движения
Данные натурных исследований [4] показали, что скорость распространения фронта отъезда постоянна и в среднем равна Vout=15 км/ч. Динамика фронта отъезда будем определять следующим выражением:
![]() ; (7)
; (7)
или
![]() . (8)
. (8)
При этом очередь распадается на две части. Первую часть составляют неподвижные транспортные средства, вторую – движущиеся от фронта разъезда к стоп-линии.
Выражение (6) уже не может быть использовано для вычисления фронта очереди. При включении разрешающего сигнала очередь транспортных средств начинает сокращаться (рис. 1), в то время как положение фронта очереди согласно формуле (5) продолжает расти. Исчезновение фронта очереди, и соответственно начало движения всех транспортных средств в очереди, происходит при выполнении условия:
![]() . (9)
. (9)
При этом очередь транспортных средств, согласно выражению (3), продолжает существовать – Q(t)>0.
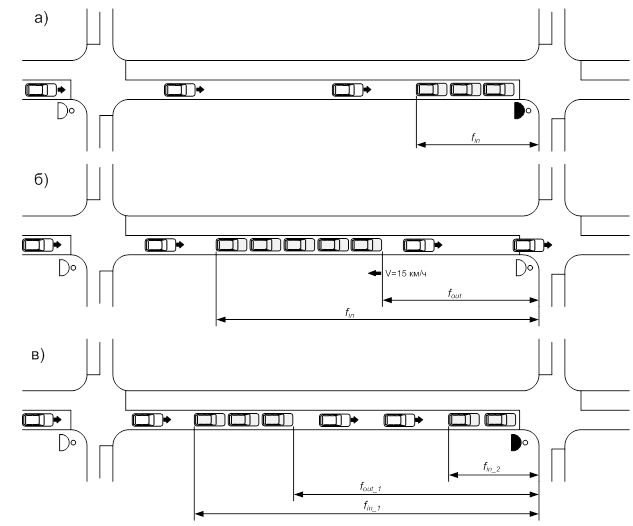
Рисунок 2. Динамика образования очереди при насыщенном движении
Выключение разрешающего сигнала светофора вновь инициирует процесс образования фронта очереди. При достаточно большой длине перегона и интенсивности движения возможно одновременное наличие двух и более фронтов очереди и разъезда на перегоне (рис. 2в). В этих условиях следует вести речь о необходимости моделирования пространственно-временной загрузки всей транспортной связи.
Сформулируем условие, при котором возможно блокирование входящих в перегон транспортных связей:
![]() ; (10)
; (10)
где![]() – длина перегона, м.
– длина перегона, м.
Выражение (10) определяет блокирование входящих транспортных связей в произвольный момент времени, в том числе и при разрешающем сигнале светофора. Гарантировать отсутствие блокирования транспортной связи можно при включении разрешающего сигнала с запаздыванием, равным времени распространения фронта разъезда очереди по всему перегону:
![]() . (11)
. (11)
Оценка эффективности методики на имитационной модели
Для оценки эффективности предложенной методики разработана модель транспортной сети в программе имитационного моделирования SUMO [5]. Сеть включала два регулируемых перекрестка, на подходе к перекрестку №1 образовывался затор (рис. 3).
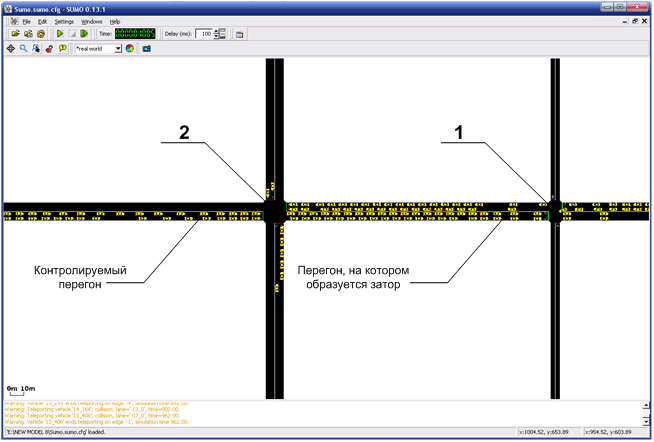
Рисунок 3. Модель транспортной сети в программе SUMO
Длительность светофорного цикла в сети и устанавливалась равной 90 с. Сдвиг на перекрестке №2 рассчитывался по формуле (11) таким образом, чтобы не происходило блокирование контролируемого перегона. Величина сдвига составила 71 с. В качестве контрольного использовался сдвиг, рассчитанный из условия безостановочного движения транспортных средств от перекрестка №2 к перекрестку №1, равный 12 с.
Оценка эффективности разработанной методики проводилась по величине задержки транспортных средств, определяемой как время ожидания транспортными средствами начала движения. Результаты моделирования задержки с периодом агрегации данных 300 с приведены на рис. 4.
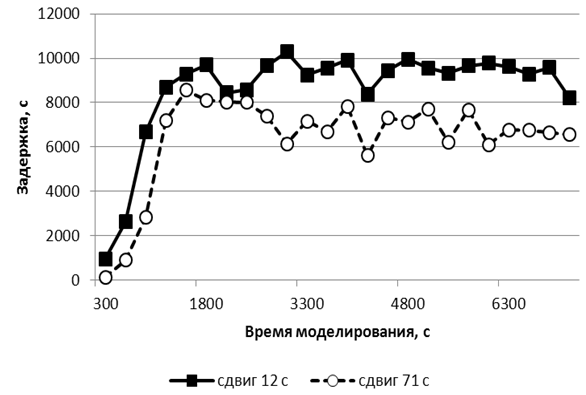
Рисунок 4. Задержка транспортных средств на контролируемом перегоне
Использование в условиях транспортного затора сдвига, рассчитанного по формуле (11), позволило сократить задержку транспортных средств на контролируемом перегоне на 25,67%.
Заключение
В насыщенных условиях движения при образовании транспортных заторов недостаточно проводить оценку только задержки и количества транспортных средств в очереди. Для полного описания процесса образования транспортных заторов в сетях со светофорным регулированием необходимо использование моделей, описывающих пространственно-временную неоднородность транспортного потока на транспортных связях.
Для предотвращения блокирования входящих в перекресток транспортных связей необходима оценка положения фронта очереди и фронта разъезда транспортных средств. Исключить блокирование транспортных связей возможно при установке сдвига разрешающего сигнала на контролируемом направлении, равным времени распространения фронта разъезда очереди по связи. Величина сдвига зависит только от состава транспортного потока и длины перегона, на котором возникает затор.
Использование предложенной модели и методики расчета сдвига разрешающего сигнала позволяет существенно сократить задержки транспортных средств.
Рецензенты:
Родионов Ю.В., д.т.н., профессор кафедры «Эксплуатация автомобильного транспорта» ФГБОУ ВПО «Пензенский государственный университет архитектуры и строительства», г. Пенза.
Бажанов А.П., д.т.н., профессор кафедры «Геотехника и дорожное строительство» ФГБОУ ВПО «Пензенский государственный университет архитектуры и строительства», г. Пенза.
Библиографическая ссылка
Орлов Н.А., Власов А.А., Чушкина К.А. СИНХРОНИЗАЦИЯ РАБОТЫ СВЕТОФОРНЫХ ОБЪЕКТОВ В УСЛОВИЯХ НАСЫЩЕННОГО ДВИЖЕНИЯ // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/en/article/view?id=12572 (дата обращения: 29.06.2026).