


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
INVERTER DEVELOPMENT OF CASCADE TYPE FOR SUBMERSIBLE PUMP MOTORS.

Нефтепромыслы обычно имеют слабую сеть, не допускающую перегрузок и сильных просадок напряжения. Прямой пуск в такой ситуации невозможен. В таких условиях погружной электродвигатель на большой глубине рационально питать высоковольтным преобразователем частоты [4]. При этом необходимо исключить паразитные гармоники. Гармоники засоряют питающую сеть и негативно влияют на изоляцию кабеля и двигателя. Регулируя скорость добычи в зависимости от дебита, можно добиться увеличения срока эксплуатации скважины.
Для решения данных задач предлагается использовать каскадный преобразователь частоты. Преобразователь состоит из высоковольтного трехфазного силового трансформатора, первичная обмотка которого соединена по схеме «звезда» с линейным напряжением 6000В, и 54 вторичных обмоток, соединенных группами по схеме «треугольник» и смещенных по фазе напряжения на 120 градусов относительно друг друга. Всего в трансформаторе имеется 18 групп независимых источников питания по 6 в каждой фазе, для питания 18 однофазных ячеек инверторов: фаза А (А1-А6); фаза В (В1-В6); фаза С (С1-С6) (рис. 1). Группа соединения многообмоточного трансформатора звезда/треугольник, что позволяет снизить величину нечетных гармоник.
При наличии шести групп независимых источников максимальное напряжение отдельной ячейки составляет 575В. Последовательное соединение 6-ти ячеек с максимальным выходным напряжением 575В позволяет получить максимальное действующее фазное напряжение 3450В, а линейное 6000В. С помощью системы управления фазы выходного напряжения отдельных ячеек сдвинуты на 10 0, что обеспечивает взаимную компенсацию высших гармоник. Регулирование величины выходного напряжения и частоты производится синхронизировано широтно-импульсной модуляцией (далее – ШИМ) напряжения в каждой ячейке. Сдвиг напряжения в отдельных ячейках каждой фазы позволяет получить многопульсную схему выпрямления преобразователя в целом, что позволяет уменьшить влияние преобразователя на питающую сеть.
В результате построения схемы по данному принципу, ток и напряжение на входе и выходе преобразователя имеют практически синусоидальную форму.

Рис. 1. Силовая схема системы «каскадный преобразователь частоты – двигатель»
Силовая ячейка имеет трехфазный выпрямитель, конденсаторный фильтр и однофазный инвертор на IGBT транзисторах. Включение транзисторов ![]() ,
, ![]() , находящихся в разных плечах однофазной мостовой схемы, будем принимать за прямое включение. При этом полярность выходного напряжения на рис. 2 обозначена «+», «-», в этом случае включение транзисторов
, находящихся в разных плечах однофазной мостовой схемы, будем принимать за прямое включение. При этом полярность выходного напряжения на рис. 2 обозначена «+», «-», в этом случае включение транзисторов ![]() ,
, ![]() будет являться инверсным, а полярность выходного напряжения обозначена на схеме (+) и (-). Выходное напряжение при инверсном включении направлено противоположно напряжению при прямом включении. Между включением одной пары транзисторов и выключением другой должна быть обеспечена пауза τвк, учитывающая время восстановления запирающих свойств транзисторов.
будет являться инверсным, а полярность выходного напряжения обозначена на схеме (+) и (-). Выходное напряжение при инверсном включении направлено противоположно напряжению при прямом включении. Между включением одной пары транзисторов и выключением другой должна быть обеспечена пауза τвк, учитывающая время восстановления запирающих свойств транзисторов.
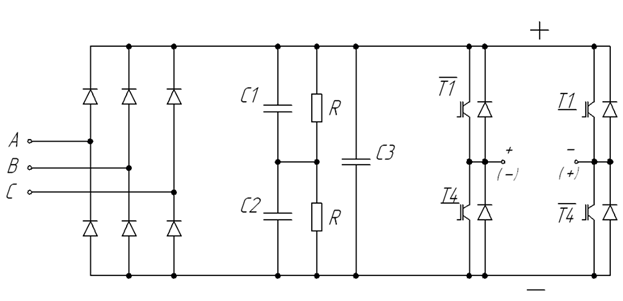
Рис. 2. Силовая ячейка
Принцип данного варианта ШИМ, на примере мостового однофазного инвертора, приведен на рис. 2. Структурная схема системы управления инвертора с этим вариантом ШИМ показана на рис. 3. Система управления транзисторными ключами содержит в своем составе нуль-орган (НО), формирователи (Ф1, Ф2), блок, обеспечивающий паузу на включение транзисторных пар (τвк), и драйверы ![]() ,
, ![]() ,
,![]() ,
, ![]() , формирующие сигнал для открытия и закрытия транзисторов. На входе нуль-органа сравниваются задающий сигнал U* (эти сигналы здесь и далее будем обозначать с индексом «звездочка») и пилообразное опорное напряжение Uоп. Если U*>Uоп, т.е. разность (U*-Uоп) положительна, то сигнал на выходе (НО) положителен, и на выходе формирователя Ф1 существует положительный сигнал f*1, который с паузой τвк включает транзисторы
, формирующие сигнал для открытия и закрытия транзисторов. На входе нуль-органа сравниваются задающий сигнал U* (эти сигналы здесь и далее будем обозначать с индексом «звездочка») и пилообразное опорное напряжение Uоп. Если U*>Uоп, т.е. разность (U*-Uоп) положительна, то сигнал на выходе (НО) положителен, и на выходе формирователя Ф1 существует положительный сигнал f*1, который с паузой τвк включает транзисторы ![]() и
и ![]() , и на выходе инвертора появится положительное напряжение (рис. 4).
, и на выходе инвертора появится положительное напряжение (рис. 4).
При отрицательной разности (U*-Uоп), когда U* и ![]() закрываются без выдержки времени, и на выходе Ф1 будет действовать отрицательный сигнал
закрываются без выдержки времени, и на выходе Ф1 будет действовать отрицательный сигнал ![]() , при наличии которого драйверы
, при наличии которого драйверы ![]() ,
, ![]() формируют небольшой отрицательный сигнал – 5В, закрывающий транзисторы
формируют небольшой отрицательный сигнал – 5В, закрывающий транзисторы ![]() и
и ![]() . Одновременно с этим на выходе Ф2 появится положительный сигнал
. Одновременно с этим на выходе Ф2 появится положительный сигнал ![]() , который с выдержкой времени τвк подается на драйверы
, который с выдержкой времени τвк подается на драйверы ![]() ,
, ![]() и инверсная пара транзисторов
и инверсная пара транзисторов ![]() ,
, ![]() включается, а на выходе инвертора появляется отрицательное напряжение, потенциалы которого на рис. 2 обозначены в скобках.
включается, а на выходе инвертора появляется отрицательное напряжение, потенциалы которого на рис. 2 обозначены в скобках.
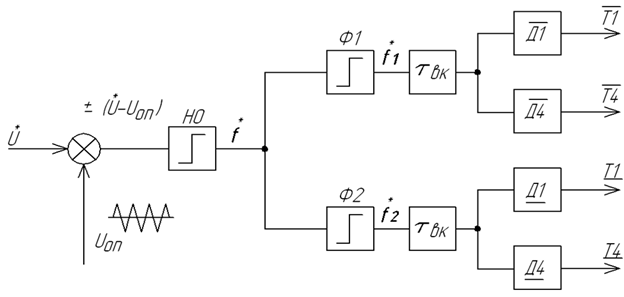
Рис. 3. Структурная схема системы управления
На рис. 4 показаны симметричное пилообразное опорное напряжение с максимальным значением Uопm и напряжение задания U*, которое предполагается постоянным в течение периода Тшим опорного напряжения. В нижней части рис. 4 показаны состояния транзисторных пар ![]() ,
, ![]() и
и ![]() ,
, ![]() и форма напряжения на выходе инвертора U. Среднее значение напряжения на выходе определяется следующим образом:
и форма напряжения на выходе инвертора U. Среднее значение напряжения на выходе определяется следующим образом:
![]() (1)
(1)
![]() (2)
(2)
где Т1, Т2 – интервалы замкнутого состояния транзисторных пар ![]() ,
, ![]() и
и ![]() ,
, ![]() соответственно; Тшим – период ШИМ, fшим – частота ШИМ.
соответственно; Тшим – период ШИМ, fшим – частота ШИМ.
Из подобия треугольников авс и а’в’с’ для рабочей части характеристик инвертора, когда ![]() , может быть записано
, может быть записано
 (3)
(3)
Отсюда с учетом приведенного выше выражения для U следует, что
![]() , (4)
, (4)
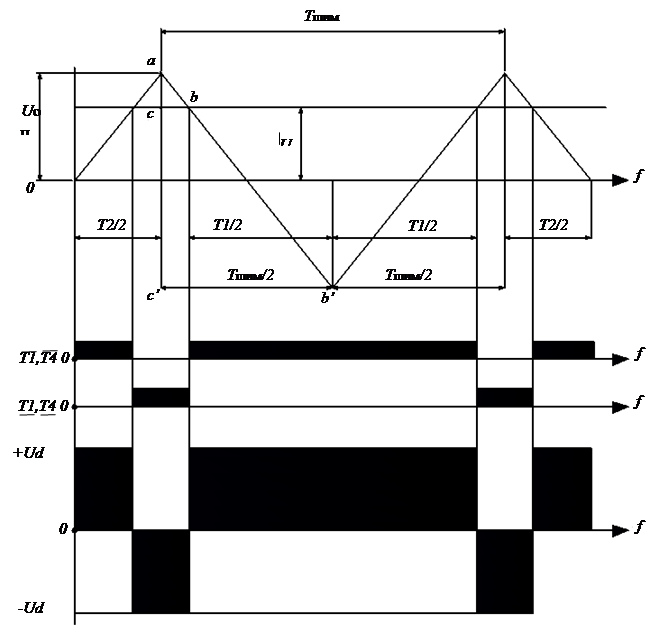
Рис. 4. Диаграмма включения пар транзисторов
где ![]() – передаточный коэффициент инвертора в линейной части характеристики, когда
– передаточный коэффициент инвертора в линейной части характеристики, когда ![]() .
.
Для получения неискаженного значения напряжения на выходе инвертора задающий сигнал ![]() не должен превышать максимальное значение опорного напряжения
не должен превышать максимальное значение опорного напряжения ![]() , а быть несколько меньше, т.е.
, а быть несколько меньше, т.е. ![]() .
.
На рис. 4 опорное напряжение ![]() принято постоянным за период ШИМ, поэтому и на выходе инвертора мы получим постоянное среднее значение напряжения.
принято постоянным за период ШИМ, поэтому и на выходе инвертора мы получим постоянное среднее значение напряжения.
Если управляющий сигнал представляет собой синусоиду с частотой f, то напряжение на выходе инвертора будет представлять собой гармоническую кривую, содержащую наряду с первой гармоникой, которая имеет частоту управляющего сигнала ![]() , и ряд гармоник более высокого порядка. Таким образом, если амплитуда
, и ряд гармоник более высокого порядка. Таким образом, если амплитуда ![]() не превышает значение
не превышает значение ![]() , то первая гармоника напряжения на выходе инвертора в определенном масштабе повторяет управляющий сигнал. Изменение его частоты приводит к изменению частоты на выходе инвертора. Изменение амплитуды управляющего сигнала при неизменной частоте будет приводить к изменению соотношения длительности положительных и отрицательных импульсов напряжения на выходе за каждый период частоты ШИМ.
, то первая гармоника напряжения на выходе инвертора в определенном масштабе повторяет управляющий сигнал. Изменение его частоты приводит к изменению частоты на выходе инвертора. Изменение амплитуды управляющего сигнала при неизменной частоте будет приводить к изменению соотношения длительности положительных и отрицательных импульсов напряжения на выходе за каждый период частоты ШИМ.
Эти диаграммы работы преобразователя реализует блок-схема управления транзисторами, показанная на рис. 3.
Математическая модель каскадного преобразователя частоты реализована в среде Mathlab 6.5 в пакете Simulink [5].
Для упрощения модели вместо многообмоточного трансформатора напряжения и блоков выпрямителей напряжения для питания отдельных ячеек взяты источники постоянного напряжения. Величина напряжения взята 575В.
С помощью инструмента «Powerqui» был проведен гармонический анализ тока на выходе из преобразователя частоты. Были получены результаты гармонического анализа для фаз А,B,C. При данной реализации ШИМ гармоническое искажение составляет всего 0,86 %, что позволяет получить на выходе преобразователя почти идеальную синусоиду.
На основе данной математической модели был разработан стенд на кафедре ЭТиЭМ, где в качестве двигателя использовался цилиндрический линейный вентильный двигатель [2]. Двигатель работал в тандеме с каскадным преобразователем частоты. Удалось получить высокий КПД и низкие потери напряжения. Описанные возможности каскадного преобразователя частоты были подтверждены на практике. Данное исследование позволяет судить о целесообразности использования каскадного преобразователя частоты для питания двигателя погружного насоса.
Работа выполнена в ФГБОУ ВПО «ПНИПУ» при финансовой поддержке Министерства образования и науки РФ (договор № 02.G25.31.0068 от 23.05.2013 г. в составе мероприятия по реализации постановления Правительства РФ № 218).
Рецензенты:
Шевелев Н.А., д.т.н., профессор, проректор по учебной работе, Пермский национальный исследовательский политехнический университет (ПНИПУ), г. Пермь.
Щицин Ю.Д., д.т.н., профессор, заведующий кафедрой «Сварочное производство и технология конструкционных материалов», Пермский национальный исследовательский политехнический университет (ПНИПУ), г. Пермь.
Библиографическая ссылка
Милюша И.В., Мирзин А.М., Коротаев А.Д., Шутемов С.В. РАЗРАБОТКА ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ КАСКАДНОГО ТИПА ДЛЯ ДВИГАТЕЛЯ ПОГРУЖНОГО НАСОСА. // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/en/article/view?id=11636 (дата обращения: 01.07.2026).