


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
WAY OF MEASUREMENT OF THE FRICTIONAL FORCES ON FORWARD SIDE OF CUTTING TOOL

Для изучения процессов, протекающих при резании материалов, необходимо не только знать параметры резания (скорость резания, подачу, глубину резания, силы резания и физико-механические свойства режущего инструмента и обрабатываемого материала), но и дополнительно учитывать другие параметры, которые явным образом измерить нельзя, например, силы трения по передней, задней или обеим граням. В статье приведен один из способов измерения сил трения по передней грани режущего инструмента с учетом длины контакта в зоне резания, который реализуется на специальном оборудовании в виде стенда, изготовленного на базе токарно-винторезного станка модели 1А616 [2] и разработанной оригинальной методики измерения сил трения и длин контактов при резании материалов [4]. На стенде были установлены: устройство для измерения сил трения и длин контактов при резании материалов «ИУ-5-ТРп» (рис. 1) (Пат. №2397476 РФ) [5] с контрольно-измерительной аппаратурой фирмы ЗАО «ПРИБОР.РУ» [2]. Разработанная методика [4] отличается от существующей методики, описанной М.Б. Гордоном (Пат. №88039 СССР) [1], тем, что при проведении измерений сил трения между срезаемым слоем и передней гранью режущего инструмента значительно сокращается трудоемкость предварительной настройки измерительного оборудования. Для правильности показаний измерительным оборудованием сил трения перед измерениями была произведена оценка точностных характеристик этого устройства [2]. В ходе оценки установлено, что суммарная погрешность при измерениях сил трения не превышает 5–6 %. Устройство способно в широком диапазоне режимов резания производить высокоточные измерения сил трения по передней грани резца с целью изучения касательных сил, действующих на этой грани (Пат. №2397476 РФ [5]). Для того чтобы устройство позволяло производить высокоточные измерения сил трения по передней грани резца, с целью изучения касательных сил был разработан и апробирован способ измерения этих сил, который приведен ниже.
Режущая часть устройства (см. рис. 1) состоит из двух частей подпружиненной пластины 3 с накладкой 2 и режущей пластины 1, разделенных между собой по углу заострения и составляющих переднюю грань резца. Подпружиненная пластина 3 с накладкой 2 расположена симметрично между телами качения 4 и имеет возможность горизонтального перемещения, а режущая пластина 1 расположена вертикально и неподвижно закреплена в корпусе устройства. При этом режущая часть устройства спроектирована так, что накладка 2 измеряет только касательную силу, то есть силу трения, действующую по передней грани этой пластины, причем доказательство этого утверждения приведено ниже.
Для измерения сил трения по передней грани резца необходимо и достаточно разделить переднюю и заднюю грани по углу заострения, исключить вертикальное и обеспечить горизонтальное перемещение передней грани, величина которого измеряется датчиком, закрепленным на резце, а также исключить вертикальное и горизонтальное перемещения задней грани.
Допустим, что передняя и задняя грань резца при резании материалов воспринимает суммарную силу R от детали и сходящей стружки (см. рис. 2). Сила R раскладывается на две составляющие: силу R1, действующую на переднюю грань резца со стороны стружки, и силу R2, действующую на заднюю грань резца со стороны детали. Сила R2 стремится переместить заднюю грань резца, следовательно, нормально задней грани действует нормальное давление Ny от детали, а по касательной к этой грани действует касательная сила Fz, возникающая между деталью и задней гранью резца. Сила R1 стремится переместить переднюю грань резца, следовательно, нормально передней грани действует нормальное давление Nz от сходящей стружки, а по касательной к этой грани действует касательная сила Fy, возникающая между сходящей стружкой и передней гранью резца.
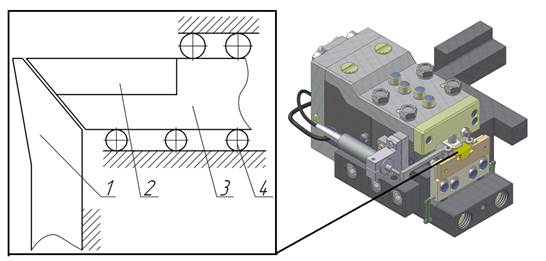
Рис. 1. Режущая часть (слева) устройства для измерения сил трения (справа) [5]
Необходимо доказать, что:
1. При перемещении передней грани резца измеряется касательная сила Fy и отсекается сила нормального давления Nz;
2. Задняя грань резца отсекает силы Ny и Fz.
Докажем сначала второе утверждение, что задняя грань резца отсекает силы Ny и Fz. Для этого проведем секущую прямую N-N′ через вершину резца (см. рис. 3).
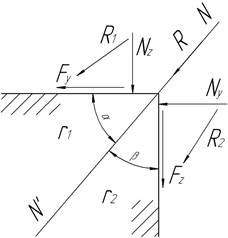
Рис. 2. Резец и силы, действующие силы на этот резец
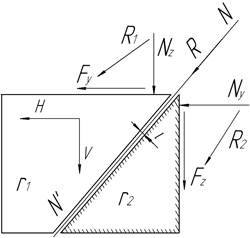
Рис. 3. Перемещения резцов
Данная секущая N-N′ делит резец по углу заострения на две части: переднюю грань, на которую действует сила R1 и от которой возникают силы Nz и Fy; заднюю грань, на которую действует сила R2 и от которой возникают силы Ny и Fz. Разъединим переднюю и заднюю грань по секущей N-N′, получим два независимых резца r1 и r2, которые в сумме дают один общий резец (см. рис. 3).
Разрешим резцу r1 перемещение в горизонтальном H и вертикальном V направлениях, а перемещения резца r2 ограничим в горизонтальном Н и вертикальном V направлениях. Следовательно, под действием суммарной силы R на общий резец будет перемещаться резец r1 в горизонтальном H и вертикальном V направлениях, образуя зазор между собой и резцом r2, при этом резец r2 не будет перемещаться (см. рис. 3).
Когда l→0 резцы r1 и r2 действуют как один общий резец, но когда l→L, тогда резцы r1 и r2 так же действуют, как один общий резец, но резец r1 воспринимает силу R1, а резец r2 воспринимает силу R2. Так как резец r2 не имеет горизонтального H и вертикального V перемещения, то он отсекает силу R2, а тем самым нормальное давление Ny и касательную силу Fz от резца r1 и воспринимает их. Следовательно, расстояние l есть зазор между резцами, которое ограничивается конструкцией и технологическими условиями изготовления общего резца. Расстояние l должно быть минимальным, но достаточным, чтобы резец r1 не соприкасался с резцом r2.
Докажем теперь первое утверждение, что передняя грань резца измеряет касательную силу Fy, отсекая нормальное давление Nz.
Введем допущение, считаем резец r1 абсолютно твердым телом, следовательно, деформаций резца r1 в горизонтальном Н и вертикальном V направлениях не будет, а деформации резца r2 не превышают зазор l, следовательно, между резцами r1 и r2 будет гарантированный зазор l.
Чтобы исключить нормальное давление Nz и оставить только горизонтальную силу Fy, необходимо исключить перемещение резца r1 в вертикальном V направлении. Для того чтобы исключить перемещения, введем три абсолютно жесткие катковые опоры A, В и С (см. рис. 4). При этом опора А и В являются направляющими резца r1 в горизонтальном направлении H, а опора С исключает момент, возникающий от силы R1 вокруг опоры А, так как опора А смещена на некоторое расстояние от линии действия силы R1.
Учитывая то, что опоры А, В и С, а также сам резец r1 являются абсолютно жесткими телами, то деформациями их можно пренебречь, при этом передняя грань резца воспринимает силу нормального давления Nz, а сама грань перемещается под действием касательной силы Fy, следовательно, резец r1 будет перемещаться только в горизонтальном Н направлении под действием только касательной силы Fy. Если установить датчик, так как показано на рис. 4, то, зная величину перемещения передней грани, можно измерить касательную силу Fy. В вертикальном V направлении перемещения передней грани резца будут исключены, так как вертикальным перемещениям препятствуют катковые опоры А, В и С.
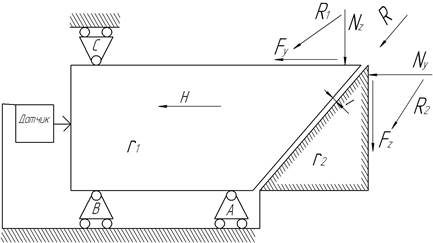
Рис. 4. Катковые опоры резца r1
Горизонтальная сила Fy – это есть сила трения по передней грани резца Fтр, следовательно, утверждение, приведенное выше, оказалось верным.
Также если передняя грань имеет вертикальное перемещение, то часть этого перемещения будет накладываться на горизонтальное перемещение этой грани, а, следовательно, часть вертикальной силы будет вычитаться из горизонтальной силы, то есть силы трения.
Следовательно, если рассматривать тела не как абсолютно твердые, а как тела, имеющие конечную деформацию, то можно утверждать, что резец r1 и опоры А, В, и С будут иметь конечную деформацию. Относительно опоры А будет поворот резца r1 на некоторый угол γ под действием силы Nz (см. рис. 4) и перемещение резца r1 под действием силы трения Fтр. Тогда на горизонтальное перемещение резца r1 будет наложена и часть вертикального перемещения резца r1.
Примем, что резец r1 есть горизонтальная балка, закрепленная на трех опорах А,В и С, на которую действует сила R1 и от этой силы возникает нормальное давление Nz и сила трения Fтр (см. рис. 5). Под действием нормального давления Nz и силы трения Fтр от стружки резец r1 переместится на некоторое расстояние в вертикальном и горизонтальном направлении и повернется относительно опоры А на некоторый угол γ отличный от нуля (см. рис. 5). Точка А прейдет в точку А1, точка С в С1, а точка В в В1. Вершина резца r1 точка G перейдет под действием силы трения Fтр в точку G1 , и резец r1 дополнительно из точки G1 переместится в точку G2 под действием нормального давления Nz. При этом суммарное перемещение резца в горизонтальном направлении составит отрезок GG3. Отрезок GG3 является суммой горизонтального GG1 и проекции вертикального перемещения на горизонтальное G1G3 (см. рис. 5, ?GG2G3).
Можно сделать вывод, что если передняя грань имеет вертикальное перемещение G1G2, то часть этого перемещения G1G3 будет накладываться на горизонтальное перемещение GG1 этой грани.
Нормальное давление Nz всегда действует перпендикулярно передней грани. Если передняя грань имеет вертикальное перемещение G1G2, то на новом положении этой грани А1С1 будет действовать нормальное давление N′z. Сила трения F′тр будет действовать так же параллельно новому положению А1С1 передней грани резца. На линию действия cилы трения F′тр проецируется дополнительная составляющая N′′z от нормальной силы N′z (см. рис. 5).
Тогда измеренная сила трения Fтризм, действующая по линии А1С1 , будет равна разности силы трения F′тр и дополнительной составляющей N′′z от силы нормального давления N′z.
Fтризм = F′тр - N′′z
Для расчетов необходимо значение силы трения F′тр, которое определяется по формуле
F′тр = Fтризм + N′′z
Измеренная сила трения Fтризм при проведении экспериментов фиксируется измерительным датчиком, установленным на резце r2 (рис. 4).
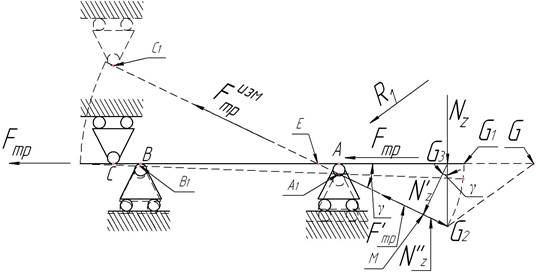
Рис. 5. Перемещения резца r1
Общая сила трения Fтр, действующая по передней грани резца, то есть по линии АС определяется по формуле: Fтр= F′тр •cos γ.
В результате измерений с помощью разработанного способа и устройства по методике измерения сил трения и длин контактов между срезаемым слоем и передней гранью инструмента проверена правильность расчёта сил трения в силовой модели для стали 40ХН2МА на передней грани инструмента [6, 7]. Получены экспериментальные зависимости длины и ширины контакта для пары «40ХН2МА – Т5К10» от скорости, глубины резания и подачи [2]. Установлено, что расчёты сил трения в силовой модели имеют хорошую корреляцию с экспериментальными значениями сил трения для пары «40ХН2МА – Т5К10» [2], следовательно, данный способ измерения сил трения по передней грани режущего инструмента отвечает первоначально поставленным для измерения сил трения критериям.
Рецензенты:
Плотников А.Л., д.т.н., профессор, заместитель декана по научной работе, Волгоградский государственный технический университет, г. Волгоград.
Игнатьев А.А., д.т.н., профессор, заведующий кафедрой «Автоматизация, управление, мехатроника», Саратовский государственный технический университет, г. Саратов.
Библиографическая ссылка
Неумоина Н.Г., Иващенко А.П. СПОСОБ ИЗМЕРЕНИЯ СИЛ ТРЕНИЯ ПО ПЕРЕДНЕЙ ГРАНИ РЕЖУЩЕГО ИНСТРУМЕНТА // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/en/article/view?id=11473 (дата обращения: 17.07.2026).