


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
ENSURE EFFICIENT OPERATION MULTI-MODULAR WIND POWER STATION WITH CHANGE WIND SPEED AND LOAD

В настоящее время существуют два направления развития ветроэнергетики, первое подразумевает конструирование одноагрегатных ветроэлектрических установок (ВЭУ) большой мощности, второе – развитие ВЭУ малой мощности, локального применения. Одним из возможных направлений развития ветроэнергетики является создание многомодульных ветроэлектрических станций, состоящих из 1-2 десятков небольших ветроколес диаметром до 2 м [2]. Мультимодульная ветроэлектростанция (ВЭС) – это ветроэлектростанция, представляющая собой систему однотипных транспортабельных модулей небольшой мощности, конструктивно и функционально совместимых между собой, которыми управляет единая система управления. Модульный принцип построения ВЭС позволяет путем увеличения количества модулей получить любую необходимую мощность, а также повысить надежность и ремонтопригодность при транспортировке, монтаже и эксплуатации [2].
Каждый модуль мультимодульной ветроэлектростанции содержит (рис. 1):
1 - ветроколесо (ВК), установленное на неподвижном валу и расположенное в роторе электрического генератора,
2 - электротехнический комплекс, состоящий из:
- синхронного генератора с магнитоэлектрическим возбуждением от постоянных магнитов неодим-железо-бор (NdFeB),
- электромеханической системы перемещения ветроколеса,
- преобразователя частоты, выполненного по схеме инвертора тока,
- блока аккумуляторных батарей [2].
Ветрогенераторная часть модуля ВЭС (ветрогенератор) представляет собой многополюсный синхронный генератор, в роторе которого установлено ветроколесо.
В состав модуля ВЭС входит импульсный регулятор тока заряда аккумуляторных батарей (рис. 1), при этом синхронный генератор на постоянных магнитах рассчитан так, чтобы при минимальной рабочей скорости ветра амплитудное значение напряжения СГПМ было равно напряжению АБ.
Импульсный регулятор тока заряда содержит силовой полупроводниковый ключ VT1, переключающийся с определенной частотой из состояния насыщения в состояние отсечки. Величина выпрямленного напряжения определяется скважностью, которая определяется разностью между сигналом напряжения обратной связи и опорного пилообразного напряжения, и частотой управляющих импульсов. Управляющие импульсы переменной частоты формируются в блоке управления схемой широтно-импульсной модуляции.
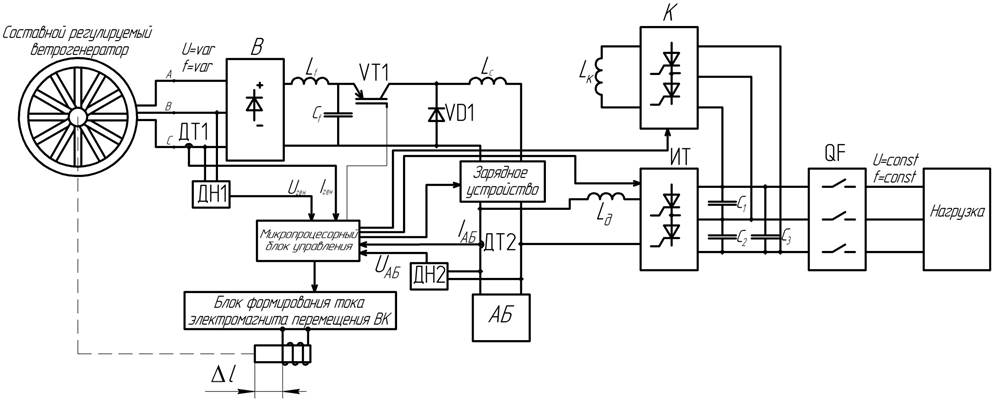
Рис. 1 – Блок-схема модуля МВЭС с системой поиска максимума при работе на заряд аккумуляторной батареи:
К – компенсирующее устройство; Lk – входной дроссель компенсатора; Ld – входной дроссель инвертора тока; C1-C3 –коммутирующие конденсаторы; QF – автоматический выключатель; ДН1, ДН2 – датчики напряжения; ДТ1, ДТ2 – датчики тока; В – выпрямитель; VT1 - силовой полупроводниковый ключ; VD1 – диод импульсного регулятора зарядного тока (ИРЗТ) ; Lc – дроссель ИРЗТ; Lf, Сf – сглаживающий фильтр
Энергия ветра очень непостоянна, она непрерывно изменяется в течение дня. Суммарная величина электроэнергии, вырабатываемой ветроэлектрическими установками, зависит от точности слежения за точкой максимума мощности с помощью контроллеров системы управления. Особенностью ветроэлектрических установок с синхронными генераторами на постоянных магнитах является зависимость выходного напряжения ВЭУ от скорости ветра. Для стабилизации и регулирования выходного напряжения синхронного генератора на постоянных магнитах мультимодульной ВЭС при изменяющихся скорости ветра и нагрузке применяется электромеханический способ, основанный на изменении положения ротора относительно обмоток статора. Для осуществления способа регулирования напряжения СГПМ каждый модуль мультимодульной ВЭС содержит электромеханическую систему перемещения ветроколеса [3].
Однако независимо от конструкции ветроколеса и типа электрического генератора мощности ВЭУ зависит от скорости вращения ротора и скорости ветра. При этом для каждого значения скорости ветра ВЭУ имеет свой максимум мощности при определенной скорости вращения ротора. Для того чтобы получать максимально возможную мощность от ВЭУ при любых скоростях ветра, необходимо регулировать скорость вращения турбины так, чтобы она всегда соответствовала оптимальной скорости вращения при данной скорости ветра.
ВЭУ с генераторами на постоянных магнитах могут быть использованы в основном в трех различных применениях: как автономные системы, как работающие на централизованную сеть и в составе гибридных систем с дизельными или солнечными установками [4]. Для каждого применения ВЭС требуется свой контроллер управления, учитывающий особенности работы ВЭС в конкретных условиях. При этом не существует контроллеров, которые были бы универсальными и подходили для всех применений ВЭС.
Существует два типа алгоритмов отслеживания TММ, а именно: методы, основанные на знании параметров и характеристик ветрогенератора (коэффициента использования энергии ветра Cp, быстроходности Z), и методы, которые позволяют выполнить поиск точек, соответствующих максимальной мощности, не зная характеристик ветрогенератора.
В рамках этих алгоритмов существует три метода поиска ТММ: метод обеспечения работы ветрогенератора с постоянной оптимальной величиной быстроходности Z; метод на основе сигнала обратной связи и метод поиска экстремума.
В первом методе управления регулируется скорость вращения генератора в целях поддержания оптимального значения быстроходности Z, при котором мощность ветрогенератора является максимальной. Этот метод требует наличия датчиков скорости ветра для измерения скорости и частоты вращения ветрогенератора, а также знания оптимального значения Z ветроколеса для того, чтобы система могла извлечь максимально возможную мощность. На рис. 2 показана блок-схема данного метода [4].
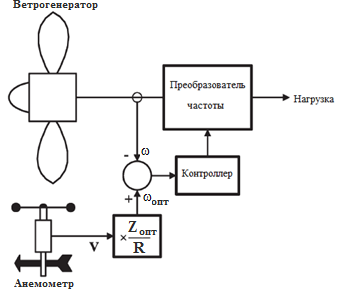
Рис. 2 - Система управления, основанная на поддержании оптимального значения быстроходности
Во втором методе управления требуется знать максимальную мощность ветровой турбины и отслеживать эту мощность через его механизмы контроля. Система управления [5] основана на зависимости оптимальной мощности Рd от частоты вращения w, которая обычно хранится в памяти микроконтроллера. ТММ кривых могут быть получены с помощью моделирования или эксперимента, проведённого на отдельных ветроустановках. Система управления основана на измерении скорости вращения ветроколеса, вычислении выходной мощности и сравнении данных с фактическим значением выходной мощности. На рис. 3 показана блок-схема данного метода.
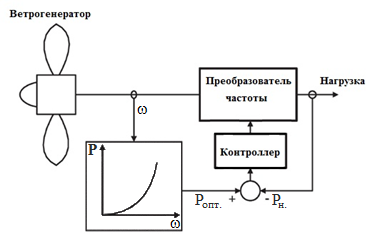
Рис. 3 - Мощность сигнала управления с обратной связью
Существует система управления, состоящая из двух контуров: внутреннего (контроль текущих значений тока и частоты вращения) и внешнего контуров электромеханической мощности. Синхронный генератор на постоянных магнитах соединен с ветроколесом напрямую [5].
Недостатком двух вышеописанных методов управления является то, что они основаны на знании оптимальной мощности и быстроходности ветрогенератора в зависимости от частоты вращения ветроколеса, которая обычно не известна с высокой степенью точности.
В третьем методе алгоритм управления непрерывно ищет ТММ ветрового колеса. Это позволяет преодолеть некоторые из общих проблем, которые обычно присущи двум другим методам.
Принцип поиска точки максимальной мощности ВЭС представлен на рис. 4. При значении производной dP/dω=0 значение мощности находится в точке максимума. При значении производной dP/dω<0 точка на мощностной характеристике смещена вправо от точки максимума. Для возврата этой точки в ТММ необходимо уменьшить частоту вращения ротора генератора. При значении производной dP/dω>0 точка на мощностной характеристике смещена влево от точки максимума. Для возврата этой точки в ТММ необходимо увеличить частоту вращения ротора генератора.
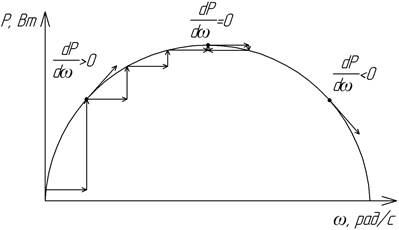
Рис. 4 - Принцип поиска максимума мощности без знаний Ср и Z
Непостоянство мощности ветрового потока и необходимость автономной работы ветроэлектрической станции вызывают включение в состав модуля МВЭС аккумуляторных батарей (АБ). Особенностью данной структуры модуля является непостоянство напряжения на выходе неуправляемого выпрямителя, вызванное прямо пропорциональной зависимостью выходного напряжения ветрогенератора от скорости вращения ротора ВК, а, следовательно, и скорости ветра.
Микропроцессорный блок управления, входящий в состав модуля МВЭС, выполняет следующие функции:
1) Формирование величины тока электромагнита электромеханической системы перемещения ветроколеса. При превышении напряжения ветрогенератора МВЭС величины номинального значения (при соединении всех секций обмотки параллельно) контроллер подает сигнал (положительный или отрицательный ток) на обмотку электромагнита электромеханической системы перемещения ветроколеса, за счет чего осуществляется перемещение ротора СГПМ относительно обмоток статора.
2) Заряд АБ непрерывным током, заряд АБ при постоянном напряжении, хранение (компенсация тока саморазряда аккумулятора).
3) Слежение за точкой максимальной мощности ветрогенератора при изменяющихся скорости ветра и нагрузке.
Контроль точки максимальной мощности при переменной скорости вращения ротора ветрогенератора позволяет максимально преобразовать энергию ветра в электроэнергию. Целевая функция при этом может быть записана как максимальная мощность генератора при наличии импульсного регулятора зарядного тока и системы поиска ТММ [1]:
 , (1)
, (1)
где RL – сопротивление нагрузки; XS и RS – индуктивное и активное внутренние сопротивления генератора; αопт – коэффициент заполнения импульсов.
Коэффициент заполнения импульсов определяется по формуле:
 . (2)
. (2)
Выводы:
1. Модульный принцип построения ветроэлектростанций позволяет получить необходимую мощность мультимодульной ВЭС за счет набора необходимого количества однотипных модулей. Данный принцип позволяет максимально снизить затраты на производство и техническое обслуживание МВЭС.
2. Электромеханическая система перемещения ветроколеса позволяет стабилизировать величину генерируемого напряжения в зоне больших скоростей ветра. В зоне малых и средних скоростей ветра стабилизация выходного напряжения обеспечивается за счет преобразователя частоты на основе инвертора тока.
3. Для получения максимальной генерируемой мощности МВЭС в диапазоне скоростей ветра от 2,5 до 10 м/с предложена структура модуля с импульсным регулятором зарядного тока и экстремальной системой настройки на режим максимальной генерируемой мощности.
Рецензенты:
Артюхов И.И., д.т.н., профессор, заведующий кафедрой «Электроснабжение промышленных предприятий» Саратовского государственного технического университета имени Гагарина Ю.А., г. Саратов.
Томашевский Ю.Б., д.т.н., профессор, заведующий кафедрой «Системотехника» Саратовского государственного технического университета имени Гагарина Ю.А., г.Саратов.
Библиографическая ссылка
Степанов С.Ф., Павленко И.М., Ербаев Е.Т. ОБЕСПЕЧЕНИЕ ЭФФЕКТИВНОЙ РАБОТЫ МУЛЬТИМОДУЛЬНОЙ ВЕТРОЭЛЕКТРОСТАНЦИИ ПРИ ИЗМЕНЕНИИ СКОРОСТИ ВЕТРА И НАГРУЗКИ // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/en/article/view?id=11407 (дата обращения: 01.07.2026).