


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
THE METHOD OF LINEAR CONTOUR FORMATION ON AERIAL PHOTOGRAPHS OF RURAL AREA

В настоящее время большое внимание уделяется контролю и наблюдению за территориями сельской местности, для чего используются геоинформационные системы. С одной стороны, современные технические средства и съемочная аппаратура позволяют получить качественные снимки участка сельской местности, с другой стороны, объем данных оказывается очень большим, что затрудняет их обработку и увеличивает необходимое на это время. Поэтому большой интерес представляют методы автоматизированного дешифрирования аэрофотоснимков [2].
Отличительные признаки в виде контуров несут много информации об изображенных объектах, поэтому часто используются в методах распознавания. Чем меньше ложных и пропущенных контуров будет известно, тем больше вероятность обнаружить топографический объект [4, 6].
Разработанный метод позволяет получить контуры в виде линий, что очень важно для методов распознавания изображений сельской местности. Связано это с особенностями изображенных на аэрофотоснимках сельской местности объектов. Границы строений, дорог, земельных участков, как правило, состоят из прямых линий, поэтому контуры в виде линий оказываются эффективны при распознавании подобных объектов. Разработанный метод работает за три шага.
Шаг первый. Получение изображения контуров для канала яркости.
Представим исходное изображение размером ![]() в виде матрицы
в виде матрицы ![]() , в который каждый элемент – это значение яркости в пикселе
, в который каждый элемент – это значение яркости в пикселе ![]() (
(![]() – положение пикселя на строке,
– положение пикселя на строке, ![]() – номер строки). Каждое исходное изображение
– номер строки). Каждое исходное изображение ![]() обрабатываем четырьмя реализациями масок Собела и получаем четыре изображения с контурами
обрабатываем четырьмя реализациями масок Собела и получаем четыре изображения с контурами ![]() (где
(где ![]() ) [1]. Такой подход выбран потому, что, во-первых, каждое изображение контуров
) [1]. Такой подход выбран потому, что, во-первых, каждое изображение контуров ![]() чувствительно к одному направлению перепада, т.е. на таких изображениях отчетливо видны контуры одного направления (горизонтальные, вертикальные, наклонные). Во-вторых, отдельное изображение
чувствительно к одному направлению перепада, т.е. на таких изображениях отчетливо видны контуры одного направления (горизонтальные, вертикальные, наклонные). Во-вторых, отдельное изображение ![]() менее подвержено влиянию помех. Таким образом, обрабатывая последовательно каждое изображение
менее подвержено влиянию помех. Таким образом, обрабатывая последовательно каждое изображение ![]() , уменьшается влияние помех и повышается вероятность обнаружить линейный контур одного направления.
, уменьшается влияние помех и повышается вероятность обнаружить линейный контур одного направления.
Затем на каждом изображении с контурами ![]() выполняется поиск контуров в виде линий, для этого последующие шаги применяются к каждому такому изображению последовательно, а на последнем шаге результаты объединяются в один общий.
выполняется поиск контуров в виде линий, для этого последующие шаги применяются к каждому такому изображению последовательно, а на последнем шаге результаты объединяются в один общий.
Шаг второй. Формирование массива с потенциальными прямыми.
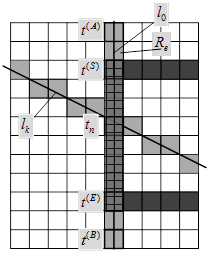
Рисунок 1 – Иллюстрация к описанию метода
Будем считать, что на втором шаге обрабатывается одно из восьми изображений с контурами, т.е. ![]() . Через каждую точку на изображении
. Через каждую точку на изображении ![]() выполняется попытка провести линию, проходящую вдоль изображения контура (в том случае, если точка находится на изображении контура). Если такую линию удается провести, то для точки сохраняются ее параметры: длина и угол наклона. Обозначим матрицу с длинами линий чрез
выполняется попытка провести линию, проходящую вдоль изображения контура (в том случае, если точка находится на изображении контура). Если такую линию удается провести, то для точки сохраняются ее параметры: длина и угол наклона. Обозначим матрицу с длинами линий чрез ![]() , а матрицу с углами линий через
, а матрицу с углами линий через ![]() . Заполнение матриц выполняется с учетом расчетов в каждой точки за несколько этапов.
. Заполнение матриц выполняется с учетом расчетов в каждой точки за несколько этапов.
Пусть ![]() ,
, ![]() , тогда точечный примитив представим как кортеж
, тогда точечный примитив представим как кортеж ![]() , следовательно, множество всех точек
, следовательно, множество всех точек ![]() . Линейный примитив представим, как кортеж
. Линейный примитив представим, как кортеж ![]() (
(![]() ,
, ![]() ). Далее:
). Далее:
1. предположим, выбрана одна из точек ![]() (
(![]() );
);
2. обозначим линейный примитив ![]() (
(![]() ,
, ![]() ) в виде вертикальной линии с углом наклона
) в виде вертикальной линии с углом наклона ![]() (угол между осью
(угол между осью ![]() и прямой, считая, что начало координат проходит через точку
и прямой, считая, что начало координат проходит через точку ![]() ), которая пройдет от верхнего края изображения до нижнего через точку
), которая пройдет от верхнего края изображения до нижнего через точку ![]() ;
;
3. представим линию ![]() в виде упорядоченного множества точек
в виде упорядоченного множества точек ![]() (
(![]() ,
, ![]() ,
, ![]() – количество точек, необходимое для изображения прямой
– количество точек, необходимое для изображения прямой ![]() ), в котором первая точка соответствует начальной точке линии (на одном конце)
), в котором первая точка соответствует начальной точке линии (на одном конце) ![]() , затем следующая за ней соседняя точка на линии и так до последней точки
, затем следующая за ней соседняя точка на линии и так до последней точки ![]() (на другом конце). Упорядоченное множество выбрано потому, что только оно позволяет сохранить точную последовательность точек, из которых состоит линия, т.к. нужно определять место разрыва яркости, обозначающего окончание изображения контура. Таким образом, линия
(на другом конце). Упорядоченное множество выбрано потому, что только оно позволяет сохранить точную последовательность точек, из которых состоит линия, т.к. нужно определять место разрыва яркости, обозначающего окончание изображения контура. Таким образом, линия ![]() разделится на два отрезка:
разделится на два отрезка: ![]() и
и ![]() , или два направления, в которых будет выполняться поиск разрыва яркости;
, или два направления, в которых будет выполняться поиск разрыва яркости;
4. обозначим через ![]() положение точки
положение точки ![]() в множестве
в множестве ![]() (его индекс);
(его индекс);
5. выполним поиск разрыва яркости на отрезке ![]() . Для этого из множества
. Для этого из множества ![]() последовательно выбираем точки
последовательно выбираем точки ![]() (
(![]() ) и сравниваем яркость в выбранной точке
) и сравниваем яркость в выбранной точке ![]() с яркостью в центральной точке
с яркостью в центральной точке ![]() . Если яркость в выбранной точке меньше, чем яркость в центральной точке
. Если яркость в выбранной точке меньше, чем яркость в центральной точке ![]() , тогда выбираем следующую точку, в противном случае определяем разрыв яркости или окончание контура на отрезке
, тогда выбираем следующую точку, в противном случае определяем разрыв яркости или окончание контура на отрезке ![]() . Если разрыв яркости найден, обозначаем координаты с разрывом
. Если разрыв яркости найден, обозначаем координаты с разрывом ![]() (
(![]() ) (для случая, когда разрыв не обнаружен
) (для случая, когда разрыв не обнаружен ![]() ). Значение
). Значение ![]() зависит от используемого градиентного оператора и качества исходного изображения. Его значение определяется как 10-15 процентов от значения яркости в центральной точке
зависит от используемого градиентного оператора и качества исходного изображения. Его значение определяется как 10-15 процентов от значения яркости в центральной точке ![]() . Оптимальным считается значение, равное 15 процентам от
. Оптимальным считается значение, равное 15 процентам от ![]() ;
;
6. выполнить поиск разрыва яркости на отрезке ![]() . Процедура полностью аналогична описанной в пункте 5, только точки из множества
. Процедура полностью аналогична описанной в пункте 5, только точки из множества ![]() выбираются в другом направлении
выбираются в другом направлении ![]() (
(![]() ) и координаты с разрывом яркости обозначаются
) и координаты с разрывом яркости обозначаются ![]() (
(![]() ) (или
) (или ![]() , если разрыв не найден);
, если разрыв не найден);
7. определяем расстояние ![]() между точками
между точками ![]() и
и ![]() . Сравниваем угол
. Сравниваем угол ![]() и длину
и длину ![]() с уже имеющимися значениями для этой точки
с уже имеющимися значениями для этой точки ![]() и
и ![]() . Если длина “вписанной” прямой оказалась больше, чем уже имеющиеся
. Если длина “вписанной” прямой оказалась больше, чем уже имеющиеся ![]() , тогда заменяем уже имеющиеся значения для этой точки полученными, т.е.
, тогда заменяем уже имеющиеся значения для этой точки полученными, т.е. ![]() и
и ![]() ;
;
8. проводим через точку ![]() следующую линию
следующую линию ![]() (
(![]() ) с углом
) с углом ![]() . Выполняем пункты с 3 по 7 до тех пор, пока не получим линии для всех направлений, т.е.
. Выполняем пункты с 3 по 7 до тех пор, пока не получим линии для всех направлений, т.е. ![]() ;
;
9. выбираем следующую точку ![]() .
.
Шаг третий. Анализ матриц с длинами и углами линий.
На третьем шаге точки, через которые удалось провести линии со схожими углами и длиной, объединяются в одно множество. Достигается это анализом матриц ![]() ,
, ![]() и выполняется за несколько этапов.
и выполняется за несколько этапов.
Обозначим через ![]() (
(![]() ,
, ![]()
![]() – количество точек в контуре,
– количество точек в контуре, ![]() ,
, ![]() – количество множеств с контурами) множество точек, принадлежащих одному контуру в виде линии, а через
– количество множеств с контурами) множество точек, принадлежащих одному контуру в виде линии, а через ![]() (
(![]() – множество точек) множество всех множеств с контурами.
– множество точек) множество всех множеств с контурами.
1. Из каждой матрицы выбираем по элементу, которые расположены в одинаковых местах, т.е. ![]() ,
, ![]() (
(![]() ,
, ![]() ).
).
2. Сравниваем значения выбранных элементов со значениями соседних элементов, для этого из каждой матрицы выбираем по одному соседнему элементу, которые расположены в одинаковых местах, т.е. ![]() ,
, ![]() (
(![]() ,
, ![]() ).
).
Если значения двух соседних элементов схожи ![]() и
и ![]() , тогда выполняем попытку объединить соответствующие этим элементам точки
, тогда выполняем попытку объединить соответствующие этим элементам точки ![]() (
(![]() ) и
) и ![]() (
(![]() ) в одно множество. В этом случае могут возникнуть следующие ситуации:
) в одно множество. В этом случае могут возникнуть следующие ситуации:
· если ни одна из точек не принадлежит уже существующему множеству точек ![]() и
и ![]() , тогда объединяем эти точки в новое множество
, тогда объединяем эти точки в новое множество ![]() и добавляем его к множеству
и добавляем его к множеству ![]() ;
;
· если первая точка ![]() принадлежит существующему множеству, а вторая
принадлежит существующему множеству, а вторая ![]() не принадлежит, тогда добавляем к уже существующему множеству вторую точку
не принадлежит, тогда добавляем к уже существующему множеству вторую точку ![]() ;
;
· если первая точка ![]() не принадлежит существующему множеству, а вторая
не принадлежит существующему множеству, а вторая ![]() принадлежит, тогда добавляем к уже существующему множеству первую точку
принадлежит, тогда добавляем к уже существующему множеству первую точку ![]() ;
;
· если первая точка принадлежит одному множеству ![]() , а вторая точка другому множеству
, а вторая точка другому множеству ![]() (
(![]() ,
, ![]() ,
, ![]() – количество множеств с контурами), при этом
– количество множеств с контурами), при этом ![]() , тогда объединяем их
, тогда объединяем их ![]() .
.
Значение ![]() выбирается из диапазона 10-20 процентов и определяет допустимое искривление линии.
выбирается из диапазона 10-20 процентов и определяет допустимое искривление линии.
Значение ![]() определяется как процент от максимальной длиной линий
определяется как процент от максимальной длиной линий ![]() или
или ![]() . Линии, идущие по направлению одного контура в разных его точках, будут иметь почти одинаковую длину, равную длине контура, поэтому значение
. Линии, идущие по направлению одного контура в разных его точках, будут иметь почти одинаковую длину, равную длине контура, поэтому значение ![]() выбирается из небольшого диапазона 10-25 процентов. Значение
выбирается из небольшого диапазона 10-25 процентов. Значение ![]() позволяет исключить случайные соседние линии, идущие в другом направлении или являющиеся ложными.
позволяет исключить случайные соседние линии, идущие в другом направлении или являющиеся ложными.
Результат работы метода предоставлен на рисунке 1, где для исходного изображения (рисунок 1,а) сформированы линейные контуры (рисунок 1б,в,г,). На рисунках 1б,в отмечены два отдельных линейных контура, принадлежащих верхней и левой границе строения, а на рисунке 1-г отмечены все линейные контуры, которые образуют топографический объект.
|
|
|
|
|
|
а) |
б) |
в) |
г) |




Рисунок 1 – Результат работы метода формирования линейных контуров
Заключение
Контуры, сформированные с использованием описанного выше метода, будут ориентированы вдоль линии. Это позволит на стадии распознавания оперировать не с контуром произвольной формы, а с линейным контуром, который принадлежит одной стороне объекта. Такой подход позволяет учитывать больше деталей и свойств распознаваемого объекта, что даст дополнительные возможности для формального описания объекта и, следовательно, повысит точность распознавания.
Рецензенты:
Светлов А.В., д.т.н., профессор, заведующий кафедрой радиотехники и радиоэлектронных систем Пензенского государственного университета, г. Пенза.
Федотов Н.Г., д.т.н., профессор, заведующий кафедрой экономической кибернетики Пензенского государственного университета, г. Пенза.
Библиографическая ссылка
Бурмистров А.В., Сальников И.И. МЕТОД ФОРМИРОВАНИЯ ЛИНЕЙНЫХ КОНТУРОВ НА АЭРОФОТОСНИМКАХ СЕЛЬСКОЙ МЕСТНОСТИ // Современные проблемы науки и образования. 2013. № 5. ;URL: https://science-education.ru/en/article/view?id=10674 (дата обращения: 02.07.2026).