


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
МATHEMATICAL MODELING OF DYNAMIC PROCESSES OF LINEAR MAGNETO-ELECTRIC DRIVE FOR TESTING THE VISCOELASTIC PROPERTIES OF ELASTOMERS FOR SPECIFIC PRESSURE CONDITIONS

В соответствии со стандартом испытаний [8,9] проверка свойств опытных образцов эластомеров при установившихся колебаниях прижимного штока якоря линейного магнитоэлектрического двигателя обуславливает необходимость решения задачи математического моделирования привода с учетом динамических процессов.
Для исследования динамики линейного магнитоэлектрического привода (ЛМЭП) воспользуемся результатами математического моделирования отдельных подсистем привода:
· в электрической подсистеме привода из-за нелинейных свойств нагрузки при синусоидальном приложенном напряжении ток в обмотке двигателя является несинусоидальным, и, наоборот, при синусоидальном токе напряжение на обмотке двигателя будет несинусоидальным. Это обстоятельство определяет концепцию на разработку управляемого источника тока, обеспечивающего заданный закон изменения электромагнитного усилия на опытный образец эластомера. Основное назначение системы регулирования при этом сводится к варьированию постоянной составляющей и амплитуды переменной составляющей тока обмотки, а также его частоты;
· в магнитной подсистеме привода в пределах активной части обмотки индукция магнитного поля, созданного постоянными магнитами из редкоземельных материалов, изменяется незначительно;
· в вязкоупругой подсистеме привода сложность математического аппарата определения динамического модуля упругости эластомеров создает труднопреодолимый барьер по составлению модели данной подсистемы и привода в целом. Поэтому представляется целесообразным для исследования динамики привода воспользоваться результатами синтеза многоконтурной схемы замещения опытного образца эластомера по экспериментальным данным, полученным в процессе релаксации напряжения опытных образцов при заданной деформации.
Обоснование и доказательство надежности и эффективности изложенных выше подходов к построению математической модели ЛМЭП с учетом вязкоупругих свойств эластомеров осуществляется на сопоставлении результатов расчета и эксперимента по исследованию релаксационных характеристик опытных образцов эластомеров [4].
Для построения математической модели отдельных подсистем ЛМЭП примем следующие допущения:
· источником питания и системой управления ЛМЭП обеспечивается заданный закон изменения тока в обмотке двигателя, содержащий постоянную ![]() и переменную синусоидальную составляющую тока
и переменную синусоидальную составляющую тока
![]() . (1)
. (1)
При этом несинусоидальная форма напряжения на зажимах источника питания неизвестна и в расчете требуется ее определение. Иными словами, в математической модели ЛМЭП источник питания и система управления замещаются идеальным управляемым источником тока;
· развиваемое на штоке ЛМЭП прижимное электромагнитное усилие и противо-ЭДС в обмотке двигателя не зависят от хода якоря и определяются из выражений
![]() ;
; ![]() , (2)
, (2)
· где ![]() постоянные, определяемые численным расчетом магнитного поля ЛМЭП. В пределах активной части обмотки двигателя распределение магнитного поля в рабочих зазорах конструкции двигателя слабо зависит от перемещения якоря, поэтому среднее значение индукции можно принять постоянным;
постоянные, определяемые численным расчетом магнитного поля ЛМЭП. В пределах активной части обмотки двигателя распределение магнитного поля в рабочих зазорах конструкции двигателя слабо зависит от перемещения якоря, поэтому среднее значение индукции можно принять постоянным;
· учитывая, что в конструкции магнитоэлектрического двигателя обмотка изготавливается из большого числа параллельно включенных секций, существенно уменьшающих ее эквивалентное индуктивное сопротивление, определяемое потоками рассеяния, а также слабость потоков рассеяния из-за значительных воздушных промежутков на путях их следования, будем считать в модели ЛМЭП индуктивность обмотки двигателя ![]() постоянной величиной, не зависящей от хода якоря;
постоянной величиной, не зависящей от хода якоря;
· для учета вязкоупругих свойств нагрузки в модели ЛМЭП воспользуемся результатами синтеза многоконтурной схемы замещения напряженно деформированного состояния опытного образца эластомера, снятого по опыту релаксации напряжения при заданной деформации. Принимая во внимание небольшой разброс в значениях соответствующих сопротивлений и емкостей участков различных схем замещения, полученных для одного и того же опытного образца эластомера, но при разных фиксированных значениях деформации ![]() , будем использовать в математической модели ЛМЭП их усредненные значения для установленного стандартом испытаний вязкоупругих свойств эластомеров диапазона изменения прижимного усилия.
, будем использовать в математической модели ЛМЭП их усредненные значения для установленного стандартом испытаний вязкоупругих свойств эластомеров диапазона изменения прижимного усилия.
С учетом принятых допущений математическая модель ЛМЭП включает в себя:
- уравнение электрического состояния обмотки линейного магнитоэлектрического двигателя
![]() , (3)
, (3)
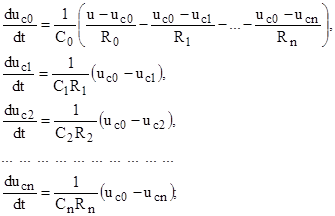
- уравнения, описывающие напряженно-деформированное состояние опытного образца эластомера, составленные для его синтезированной многоконтурной схемы замещения с использованием уравнений Кирхгофа (для упрощения записи уравнений воспользуемся обозначениями, принятыми действующим стандартом для электрических схем, учитывая формальную аналогию при замене параметров электрической цепи с сопротивлениями ![]() на инверсные модули упругости
на инверсные модули упругости ![]() , с емкостями
, с емкостями ![]() на коэффициенты вязкого течения
на коэффициенты вязкого течения ![]() , с токами
, с токами ![]() и напряжениями на участках цепи
и напряжениями на участках цепи ![]() и
и ![]() соответственно на механические напряжения
соответственно на механические напряжения ![]() , упругие
, упругие ![]() и вязкие относительные деформации
и вязкие относительные деформации ![]() , с напряжением
, с напряжением ![]() и током
и током ![]() на входе электрической цепи соответственно на полные деформацию
на входе электрической цепи соответственно на полные деформацию ![]() и механическое напряжение
и механическое напряжение ![]() ).
).
 (4)
(4)
- уравнения движения якоря
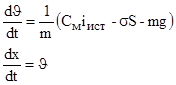 , (5)
, (5)
где ![]() - площадь поперечного сечения опытного образца эластомера,
- площадь поперечного сечения опытного образца эластомера, ![]() - масса якоря,
- масса якоря, ![]() - ход якоря.
- ход якоря.
- уравнения связи между токами (механические напряжения) и напряжениями (деформациями) на участках многоконтурной схемы замещения опытного образца эластомера
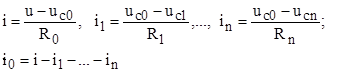 (6)
(6)
и, соответственно, между ходом якоря ![]() и полной относительной деформацией
и полной относительной деформацией ![]()
![]() , (7)
, (7)
где ![]() - высота опытного образца эластомера в ненагруженном состоянии.
- высота опытного образца эластомера в ненагруженном состоянии.
Для исследования динамики ЛМЭП уравнения (1-7) необходимо объединить в систему и провести ее решение с использованием численных методов [1-3,10] анализа жестких систем уравнений, характеризующихся большим диапазоном изменений постоянных времени, при нулевых начальных условиях и ограничениях:
![]() , (8)
, (8)
![]() , (9)
, (9)
где ![]() - амплитуда хода якоря;
- амплитуда хода якоря; ![]() - максимально допустимое напряжение на обмотке двигателя.
- максимально допустимое напряжение на обмотке двигателя.
Разработанную математическую модель используем для расчета его динамических характеристик ЛМЭП при заданном законе изменения тока в обмотке двигателя ![]() . Расчет проведем для двух образцов эластомеров, имеющих различные свойства, обусловленные химическим составом (в состав эластомера входят различные марки технического углерода, П-550 и П-234).
. Расчет проведем для двух образцов эластомеров, имеющих различные свойства, обусловленные химическим составом (в состав эластомера входят различные марки технического углерода, П-550 и П-234).
Исследования процесса релаксации напряжения в опытных образцах эластомеров на испытательном стенде показывают, что в процессе релаксации напряжения при фиксированных значениях деформации ![]() участвуют шесть экспонент, имеющих различные постоянные времени
участвуют шесть экспонент, имеющих различные постоянные времени ![]() . В [5,6] рассматривается алгоритм по синтезу многоконтурной схемы замещения опытного образца эластомера (рис. 1) с использованием его при исследовании динамических характеристик привода и реологических характеристик эластомеров.
. В [5,6] рассматривается алгоритм по синтезу многоконтурной схемы замещения опытного образца эластомера (рис. 1) с использованием его при исследовании динамических характеристик привода и реологических характеристик эластомеров.

Рис. 1. Многоконтурная схема замещения цепи в операторной форме
Параметры многоконтурной схемы замещения вязкоупругого испытуемого образца приведены в табл. 1.
Таблица 1
Параметры многоконтурной схемы замещения опытного образца эластомера с различным наполнителем технического углерода П-550 и П-234
|
Техуглерод П - 550 |
Техуглерод П- 234 |
||||
|
|
|
|
|
|
|
|
3.541 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.158 |
|
|
|
|
|
|
|
|
|
Используя оптимизационный расчет по условиям максимума прижимного усилия на опытный образец эластомера в качестве базовой конструкции магнитной системы выбрана магнитная система с магнитами, намагниченными в радиальном направлении с двумя воздушными каналами (рис. 2) [7]. Конструктивные параметры магнитной системы магнитоэлектрического двигателя приведены в таблице 2.
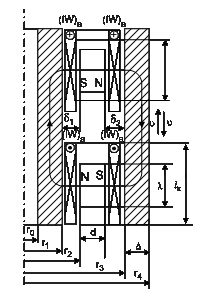
Рис. 2. Конструкция магнитной системы магнитоэлектрического двигателя
Таблица 2
Конструктивные параметры базовой конструкции магнитоэлектрического двигателя
|
Наименование параметра |
Ед. изм. |
Значение |
Наименование параметра |
Ед. изм. |
Значение |
|
Амплитуда хода якоря, |
м |
0.005 |
Средний радиус внутренней обмотки |
м |
|
|
Высота магнита, |
м |
0.054 |
Средний радиус внешней обмотки |
м |
|
|
Длина магнита по оси намагничивания, d |
м |
|
Радиус внутреннего сердечника магнитопровода, |
м |
|
|
Высота активной части обмотки, |
м |
0.06 |
Радиус внутренней обмотки, |
м |
|
|
Высота обмотки, |
м |
0.07 |
Радиус магнита, |
м |
|
|
Толщина внутренней обмотки, |
м |
|
Радиус внешней обмотки, |
м |
|
|
Толщина внешней обмотки, |
м |
|
Радиус внешнего сердечника магнитопровода, |
м |
|
|
Средний радиус магнита |
м |
5.18 10-2 |
Индукция в нейтральном сечении магнита |
Тл |
0.578 |
На основе численного расчета магнитного поля при различных положениях якоря были получены средние значения коэффициентов для определения тягового усилия и противо-ЭДС обмотки магнитоэлектрического двигателя ![]() и
и ![]() .
.
Параметры испытуемых цилиндрических образцов эластомеров в ненагруженном состоянии: диаметр, высота и площадь поперечного сечения равны соответственно ![]() м,
м, ![]() ,
, ![]()
![]() .
.
Сравнение вариантов расчета динамических характеристик ЛМЭП с различными опытными образцами эластомеров проведем при заданном значении тока в обмотке двигателя и температуре испытаний (рис. 3).
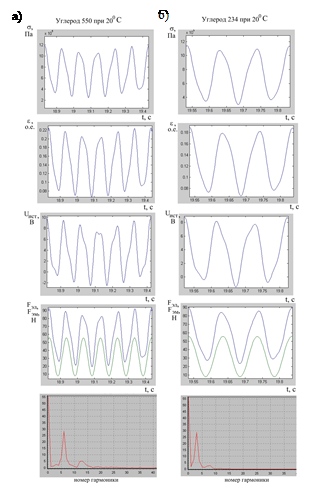
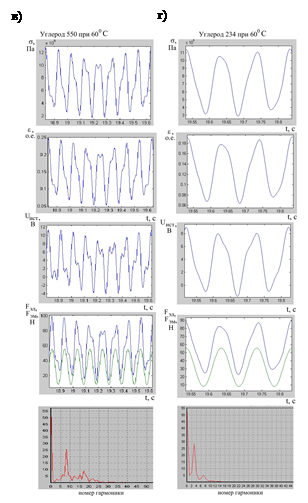
Рис. 3. Динамические характеристики ЛМЭП при различных температурах испытаний опытных образцов эластомеров, наполненных техническим углеродом П-550 и П-234: для ![]() соответственно колонки с результатами расчета (а, б); для
соответственно колонки с результатами расчета (а, б); для ![]() то же, но колонки (в, г). В колонках (сверху вниз) приведены мгновенные значения расчетных величин: механического напряжения
то же, но колонки (в, г). В колонках (сверху вниз) приведены мгновенные значения расчетных величин: механического напряжения ![]() , деформации
, деформации ![]() , напряжения источника питания
, напряжения источника питания ![]() , механической
, механической ![]() и электромагнитной
и электромагнитной ![]() сил, а также результаты разложения деформации
сил, а также результаты разложения деформации ![]() в ряд Фурье с выделением основной гармоники частотой 10 Гц.
в ряд Фурье с выделением основной гармоники частотой 10 Гц.
При принятых допущениях математическая модель ЛМЭП представляет собой смешанную систему дифференциально-алгебраических уравнений. Отражение в модели широкого спектра элементарных релаксационных процессов, протекающих в ветвях многоконтурной схемы замещения опытного образца эластомера, а также их взаимо-действие с другими процессами, происходящими в электрической и механической подсистемах привода, определяют высокую размерность полученной системы уравнений и ее жесткость. Особенности разработанной модели согласуются с использованием численных методов расчета жестких систем уравнений, что делает возможным применение модели ЛМЭП для исследования динамических характеристик привода (рис. 3) и определения реологических характеристик опытных образцов эластомеров при разложении расчетных временных зависимостей механической силы и деформации в ряд Фурье (табл. 3).
Таблица 3
Реологические характеристики опытных образцов эластомеров с различным наполнителем технического углерода П-550 и П- 234 при температуре испытаний ![]()
|
№ |
Параметр |
Условное обозначение |
Техуглерод П-550 |
Техуглерод |
||
|
Т=20° |
Т= 60° |
Т=20° |
Т= 60° |
|||
|
1 |
Динамический модуль упругости, МПа |
|
5.84 |
5.62 |
6.87 |
6.67 |
|
2 |
Модуль
упругости, |
|
45.9 |
44.1 |
54.0 |
52.4 |
|
3 |
Модуль
вязкости, |
|
0.27 |
0.046 |
0.633 |
0.397 |
|
4 |
Тангенс угла механических потерь, |
|
5.95 |
1.04 |
11.74 |
7.57 |
Проведенные исследования динамических характеристик ЛМЭП с различными опытными образцами эластомеров показали работоспособность математической модели и хорошую степень соответствия ее реальным процессам в приводе, что подтверждается уточнением решения задачи оптимизации конструкции привода и накопленным опытом проектирования и создания экспериментального макетного образца на основе разработанных расчетных методик.
Рецензенты:
Федоров В.К., д.т.н., профессор кафедры «Электротехника и электрификация», Омского государственного аграрного университета им. П.А. Столыпина, г. Омск.
Сергеев Р.В., к.т.н., доцент кафедры «Электрические машины и общая электротехника» Омского государственного университета путей сообщения, г. Омск.
Библиографическая ссылка
Татевосян А.А., Осинина Е.В. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ ЛИНЕЙНОГО МАГНИТОЭЛЕКТРИЧЕСКОГО ПРИВОДА ДЛЯ ИСПЫТАНИЯ ВЯЗКОУПРУГИХ СВОЙСТВ ЭЛАСТОМЕРОВ ПРИ ЗАДАННЫХ РЕЖИМАХ НАГРУЖЕНИЯ // Современные проблемы науки и образования. 2013. № 5. ;URL: https://science-education.ru/en/article/view?id=10660 (дата обращения: 02.07.2026).