


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
RESEARCH OF DEPENDENCE OF THE GEOMAGNETIC FIELD VECTOR PERIODIC COMPONENTS FROM THE GEOGRAPHIC COORDINATES OF THE OBSERVATION POINT

Введение
На работоспособность технических средств и самочувствие человека оказывает влияние ряд факторов природного происхождения. Среди них особое внимание уделяется магнитному полю Земли (МПЗ). В периоды возмущения геомагнитной активности (ГМА) выявлено негативное влияния МПЗ как на самочувствие человека, так и на работоспособность технических средств [12]. У метеозависимых людей наблюдаются нарушения функционирования сердечно-сосудистой и нервной систем, повышается риск инсультов [6], наблюдаются сбои в работе систем навигации космических летательных объектов, трансформаторов, систем радиосвязи [8]. Современные методы прогноза геомагнитных возмущений, основанные на оптических наблюдениях за активностью Солнца и анализе процессов на его поверхности, обладают сложностью исполнения и невысокой достоверностью [5]. Поэтому проблема мониторинга и прогнозирования ГМА является в настоящее время весьма актуальной.
Цель работы: изучение и анализ модели АРПСС для прогнозирования геомагнитных возмущений.
Материал и методы исследования. Статистическая обработка материала и вычисления проводились с использованием пакета прикладных программ MSExcel 2003, statistica 6.0[12].
В качестве исходных данных использовались значения временных рядов вектора напряженности (ВН) геомагнитного поля(ГМП)H(t) с интервалом t=1 мин., за период 14 лет, измеренные на обсерватории ADDISABAB (AAE, Эфиопия), а также индексы геомагнитной активности K на каждый день из этого периода. С целью выявления возможности прогнозирования спокойного и возмущенного ГМП на первом этапе были выделены 10 рядов, не содержащих возмущений (невозмущенный ряд) H(НР)(t), т.е. приК-индекс![]() 4, и 10 рядов, содержащих магнитную бурю (возмущенный ряд)H(ВР)(t), т.е. при К-индекс>4.
4, и 10 рядов, содержащих магнитную бурю (возмущенный ряд)H(ВР)(t), т.е. при К-индекс>4.
Результаты и обсуждение
В ходе данной работы проводились исследования временных рядов значений ВНГМП для получения модели прогноза с использованием математического аппарата авторегрессии и проинтегрированного скользящего среднего (АРПСС). Данный метод чрезвычайно популярен во многих приложениях, и практика подтверждает его мощность и гибкость [11], он является наиболее распространенным общим методом стохастического моделирования во многих областях научных исследований и используется в тех случаях, когда нет отчетливо выраженных регулярных составляющих, а отдельные наблюдения содержат значительную ошибку.Метод АРПСС основан на использовании двух процессов [3]:
1) процесс авторегрессии, описывающий последовательную зависимость элементов временного ряда следующим уравнением [2]:
![]() ,
,
где ![]() - текущее значение временного ряда,
- текущее значение временного ряда, ![]() - константа (свободный член),
- константа (свободный член), ![]() ,
, ![]() ,
, ![]() ,... (-1<
,... (-1<![]() <1)- параметры авторегрессии,
<1)- параметры авторегрессии, ![]() - предшествующее значение временного ряда,
- предшествующее значение временного ряда, ![]() - случайная компонента. Данное уравнение показывает, что каждое наблюдение есть сумма случайной компоненты и линейной комбинации предыдущих наблюдений;
- случайная компонента. Данное уравнение показывает, что каждое наблюдение есть сумма случайной компоненты и линейной комбинации предыдущих наблюдений;
2) процесс скользящего среднего, описывающий суммарное воздействие предыдущих ошибок на каждый элемент ряда следующим уравнением:
![]() ,
,
где ![]() - свободный член скользящего среднего,
- свободный член скользящего среднего, ![]() ,
, ![]() ,
, ![]() , ... (-1<
, ... (-1<![]() <1) - параметры скользящего среднего,
<1) - параметры скользящего среднего, ![]() - случайная компонента. В общем виде модель записывается как АРПСС (p, d, q), где p – параметр авторегрессии, d – порядок разности, q – параметр скользящего среднего.Мультипликативная сезонная АРПСС представляет естественное развитие и обобщение обычной модели АРПСС на ряды, в которых имеется периодическая сезонная компонента. В дополнение к несезонным параметрам в модель вводятся сезонные параметры для определенного лага (устанавливаемого на этапе идентификации порядка модели). Аналогично параметрам простой модели АРПСС эти параметры называются: сезонная авторегрессия (Ps), сезонная разность (Ds) и сезонное скользящее среднее (Qs). Таким образом, полная сезонная АРПСС может быть записана как АРПСС (p,d,q)(Ps,Ds,Qs) [11]. Для построения модели использовался алгоритм, приведенный на рисунке 1, основанный на анализе автокорреляционной и частной автокорреляционной функций по правилам, приведенным ниже [2].
- случайная компонента. В общем виде модель записывается как АРПСС (p, d, q), где p – параметр авторегрессии, d – порядок разности, q – параметр скользящего среднего.Мультипликативная сезонная АРПСС представляет естественное развитие и обобщение обычной модели АРПСС на ряды, в которых имеется периодическая сезонная компонента. В дополнение к несезонным параметрам в модель вводятся сезонные параметры для определенного лага (устанавливаемого на этапе идентификации порядка модели). Аналогично параметрам простой модели АРПСС эти параметры называются: сезонная авторегрессия (Ps), сезонная разность (Ds) и сезонное скользящее среднее (Qs). Таким образом, полная сезонная АРПСС может быть записана как АРПСС (p,d,q)(Ps,Ds,Qs) [11]. Для построения модели использовался алгоритм, приведенный на рисунке 1, основанный на анализе автокорреляционной и частной автокорреляционной функций по правилам, приведенным ниже [2].
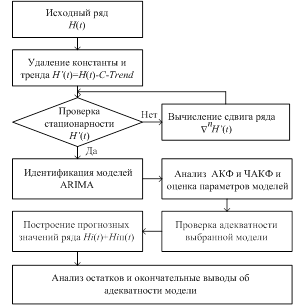
Рисунок 1 – Алгоритм получения модели АРПСС
- Один параметр (p): АКФ - экспоненциально затухает; ЧАКФ - имеет выброс для лага 1, для других значений задержек корреляции нет.
- Два параметра авторегрессии (p): АКФ имеет форму затухающей синусоиды или экспоненциально убывает; ЧАКФ имеет выброс на сдвигах 1 и 2, нет корреляций на других лагах.
- Один параметр скользящего среднего (q): АКФ имеет выброс на лаге 1, нет корреляций на других лагах; ЧАКФ экспоненциально убывает либо монотонно, либо меняя знак.
- Два параметра скользящего среднего (q): АКФ имеет выбросы на лагах 1 и 2, нет корреляций на других лагах. ЧАКФ имеет форму синусоиды или экспоненциально затухает.
- Один параметр авторегрессии (p) и один параметр скользящего среднего (q): АКФ экспоненциально убывает с лага 1; ЧАКФ - экспоненциально убывает с лага 1.
Исходные рядыH(НР)(t) и H(ВР)(t) подвергались математической обработке, в результате которой было удалено среднеезначение рядаC и тренд по формуле [9]:
![]() -
-  -
- ![]() ,
,
где - среднее арифметическое ряда ![]() , n – количество измерений,
, n – количество измерений, ![]() - линейный тренд.
- линейный тренд.
Для получения адекватной модели АРПСС необходимо, чтобы временной ряд имел стационарный характер [2], т.е. имел постоянные по времени среднееm = const, дисперсию σ2 = constи автокорреляции ![]() є (µ, σ2).
є (µ, σ2).
Проверить ряд на свойство стационарности можно, построив автокорреляционную (АКФ) и частную автокорреляционную функции (ЧАКФ) [3].Критерий нестационарности выражается в отсутствии тенденции к затуханию у выборочной автокорреляционной функции ряда H’(t) [11].Если это условие не выполняется, необходимо выполнить преобразование ряда ![]() к стационарному виду. Этого можно добиться с помощью операции нахождения разности ряда
к стационарному виду. Этого можно добиться с помощью операции нахождения разности ряда ![]() с лагом
с лагом ![]() по формуле:
по формуле:
![]() -
-![]() -
-![]() ,
,
где ![]() - значение ряда в данный момент времени,
- значение ряда в данный момент времени, ![]() -
-![]() - значение ряда в момент времени (t-
- значение ряда в момент времени (t-![]() ), n – количество операций взятия разности.
), n – количество операций взятия разности.
При достижении стационарности преобразованного ряда ![]() получаем параметр модели d=n [3]. На рисунке 2 представлены графики значений H’(НР)(t) и H’(ВР)(t) и их АКФ и ЧАКФ. На рисунках 2 в-е по вертикали отложены значения лага
получаем параметр модели d=n [3]. На рисунке 2 представлены графики значений H’(НР)(t) и H’(ВР)(t) и их АКФ и ЧАКФ. На рисунках 2 в-е по вертикали отложены значения лага ![]() , а по горизонтали коэффициенты корреляции K.
, а по горизонтали коэффициенты корреляции K.
а) 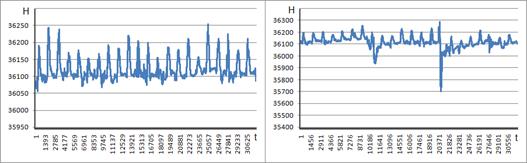 б)
б)
в)  г)
г)
д) 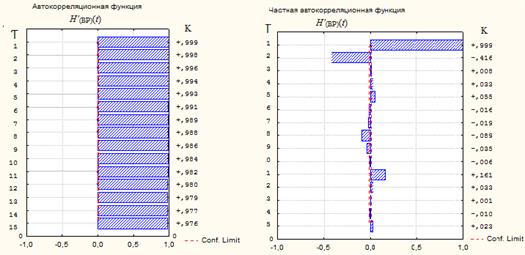 е)
е)
Рисунок 2–Временные ряды H’(НР)(t) (а) иH’(ВР)(t) (б) и их АКФ (в, д) и ЧАКФ (г,е) исходных значений
Из графиков видно, что анализируемые ряды имеют сильные корреляции (коэффициенты корреляции K на первых 15 лагах близки к 1), поэтому не являются стационарными [2].Применим разностный оператор ![]() сначала для лага
сначала для лага ![]() 1=1, а затем для лага
1=1, а затем для лага ![]() 2=1440 (так как априори известна периодическая составляющая солнечно-суточных вариаций ВН ГМП с периодом 24 часа), а взяв разность со значением лага, равным периоду сезонной компоненты временного ряда, можно исключить периодичную составляющую [11]. На рисунке 3 показаны АКФ и ЧАКФ полученных после применения разностного оператора
2=1440 (так как априори известна периодическая составляющая солнечно-суточных вариаций ВН ГМП с периодом 24 часа), а взяв разность со значением лага, равным периоду сезонной компоненты временного ряда, можно исключить периодичную составляющую [11]. На рисунке 3 показаны АКФ и ЧАКФ полученных после применения разностного оператора ![]() с лагами
с лагами ![]() 1=1 и
1=1 и ![]() 2=1440 рядов
2=1440 рядов ![]() 2H’(НР)(t) и
2H’(НР)(t) и ![]() 2H’(ВР)(t).
2H’(ВР)(t).
а)  б)
б)
в) 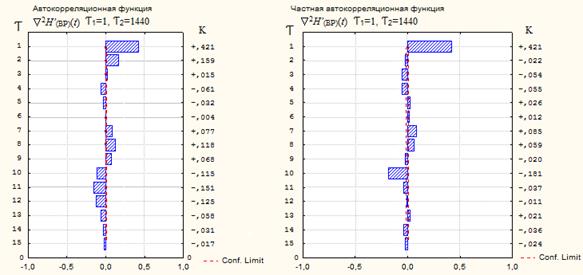 г)
г)
Рисунок 3 – АКФ и ЧАКФ полученных после взятия разностей с лагами ![]() 1=1 и
1=1 и
![]() 2=1440 рядов
2=1440 рядов ![]() 2H’(НР)(t) и
2H’(НР)(t) и ![]() 2H’(ВР)(t)
2H’(ВР)(t)
Из графиков АКФи ЧАКФ видно, что ряды ![]() 2H’(НР)(t) и
2H’(НР)(t) и ![]() 2H’(ВР)(t) имеют стационарный характер – нет периодичностей и ярко выраженных корреляционных пиков [4], что в соответствии с правилами [3] позволяет определить параметры моделикак (0,1,1)(1,1,0) с сезонным сдвигом 1440.О качестве применяемой модели можно судить лишь по совокупности сопоставлений прогнозных значений с фактическими. Простой мерой качества прогнозов является оправдываемость прогноза μ, что определяется формулой[9]:
2H’(ВР)(t) имеют стационарный характер – нет периодичностей и ярко выраженных корреляционных пиков [4], что в соответствии с правилами [3] позволяет определить параметры моделикак (0,1,1)(1,1,0) с сезонным сдвигом 1440.О качестве применяемой модели можно судить лишь по совокупности сопоставлений прогнозных значений с фактическими. Простой мерой качества прогнозов является оправдываемость прогноза μ, что определяется формулой[9]:
![]()
где p - количество подтвержденных фактическими данными прогнозов; q – количество неподтвержденных фактическими данными прогнозов. В таблице 1 приведены результаты оценки качества прогноза для каждого из десяти невозмущенных рядов Hn’(НР)(t) и каждого из десяти рядов Hn’(ВР)(t) для горизонта прогнозирования 1, 2 и 3 часа, где n– порядковый номер ряда.
Таблица 1 –Результаты оценивания параметров модели (0,1,1)(1,1,0)
|
Вид ГМП |
Ряд |
Параметр модели АРПСС |
Оценка параметра модели |
Нижняя граница 95% дов. интервала |
Верхняя граница 95% дов. интервала |
|
||||
|
1ч. |
2ч. |
3ч. |
||||||||
|
Невозмущенное поле |
H1’(НР)(t) |
q(1) |
-0,06 |
-0,07 |
-0,05 |
1,00 |
1,00 |
1,00 |
||
|
Ps(1) |
-0,51 |
-0,52 |
-0,50 |
|||||||
|
H2’(НР)(t) |
q(1) |
-0,37 |
-0,38 |
-0,36 |
1,00 |
1,00 |
1,00 |
|||
|
Ps(1) |
-0,52 |
-0,53 |
-0,51 |
|||||||
|
H3’(НР)(t) |
q(1) |
-0,26 |
-0,27 |
-0,25 |
1,00 |
1,00 |
1,00 |
|||
|
Ps(1) |
-0,49 |
-0,50 |
-0,48 |
|||||||
|
H4’(НР)(t) |
q(1) |
0,34 |
0,33 |
0,35 |
1,00 |
1,00 |
1,00 |
|||
|
Ps(1) |
0,49 |
0,50 |
0,48 |
|||||||
|
H5’(НР)(t) |
q(1) |
0,28 |
0,28 |
0,29 |
0,97 |
0,95 |
0,93 |
|||
|
Ps(1) |
0,16 |
0,15 |
0,17 |
|||||||
|
H6’(НР)(t) |
q(1) |
-0,08 |
-0,09 |
-0,07 |
0,94 |
0,92 |
0,90 |
|||
|
Ps(1) |
-0,51 |
-0,52 |
-0,50 |
|||||||
|
H7’(НР)(t) |
q(1) |
-0,27 |
-0,28 |
-0,29 |
0,98 |
0,96 |
0,94 |
|||
|
Ps(1) |
-0,39 |
-0,40 |
-0,38 |
|||||||
|
H8’(НР)(t) |
q(1) |
-0,08 |
-0,09 |
-0,07 |
1,00 |
1,00 |
1,00 |
|||
|
Ps(1) |
-0,51 |
-0,52 |
-0,50 |
|||||||
|
H9’(НР)(t) |
q(1) |
0,22 |
0,21 |
0,23 |
0,93 |
0,91 |
0,89 |
|||
|
Ps(1) |
-0,49 |
-0,50 |
-0,48 |
|||||||
|
H10’(НР)(t) |
q(1) |
-0,06 |
-0,07 |
-0,05 |
1,00 |
1,00 |
1,00 |
|||
|
Ps(1) |
-0,51 |
-0,52 |
-0,50 |
|||||||
|
Возмущенное поле |
H1’(ВР)(t) |
q(1) |
-0,11 |
-0,12 |
-0,10 |
0,34 |
0,33 |
0,32 |
||
|
Ps(1) |
-0,53 |
-0,54 |
-0,52 |
|||||||
|
H2’(ВР)(t) |
q(1) |
-0,34 |
-0,35 |
-0,33 |
0,15 |
0,15 |
0,15 |
|||
|
Ps(1) |
-0,47 |
-0,48 |
-0,46 |
|||||||
|
H3’(ВР)(t) |
q(1) |
-0,53 |
-0,52 |
-0,50 |
0,09 |
0,08 |
0,07 |
|||
|
Ps(1) |
-0,55 |
-0,56 |
-0,54 |
|||||||
|
H4’(ВР)(t) |
q(1) |
-0,46 |
-0,47 |
-0,45 |
0,22 |
0,21 |
0,20 |
|||
|
Ps(1) |
-0,50 |
-0,51 |
-0,49 |
|||||||
|
H5’(ВР)(t) |
q(1) |
-0,11 |
-0,12 |
-0,10 |
0,21 |
0,20 |
0,19 |
|||
|
Ps(1) |
-0,48 |
-0,49 |
-0,47 |
|||||||
|
H6’(ВР)(t) |
q(1) |
-0,14 |
-0,15 |
-0,13 |
0,05 |
0,05 |
0,04 |
|||
|
Ps(1) |
-0,53 |
-0,54 |
-0,52 |
|||||||
|
H7’(ВР)(t) |
q(1) |
-0,07 |
-0,08 |
-0,06 |
0,23 |
0,23 |
0,23 |
|||
|
Ps(1) |
-0,50 |
-0,51 |
-0,49 |
|||||||
|
H8’(ВР)(t) |
q(1) |
-0,07 |
-0,08 |
-0,06 |
0,25 |
0,24 |
0,23 |
|||
|
Ps(1) |
-0,51 |
-0,52 |
-0,50 |
|||||||
|
H9’(ВР)(t) |
q(1) |
-0,06 |
-0,07 |
-0,05 |
0,12 |
0,12 |
0,11 |
|||
|
Ps(1) |
-0,43 |
-0,44 |
-0,42 |
|||||||
|
H10’(ВР)(t) |
q(1) |
-0,08 |
-0,09 |
-0,07 |
0,29 |
0,29 |
0,28 |
|||
|
Ps(1) |
-0,51 |
-0,52 |
-0,50 |
|||||||
Из таблицы видно, что ![]() <0,4 для рядов H’(ВР)(t) и
<0,4 для рядов H’(ВР)(t) и ![]() > 0,8 для рядов H’(НР)(t). Это позволяет сделать вывод о том, что идентифицированная модель АРПСС (0,1,1)(1,1,0) не позволяет строить прогноз геомагнитных возмущений.
> 0,8 для рядов H’(НР)(t). Это позволяет сделать вывод о том, что идентифицированная модель АРПСС (0,1,1)(1,1,0) не позволяет строить прогноз геомагнитных возмущений.
На рисунке 4 представлены результаты прогноза временных рядов H1’(НР)(t) (а) иH1’(ВР)(t)(б) значений ВН ГМП с помощью модели АРПСС (0,1,1)(1,1,0).
а) 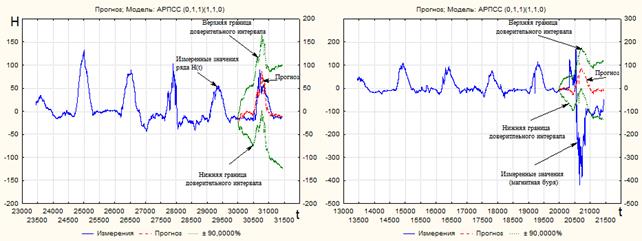 б)
б)
Рисунок 4 – Результаты прогноза с помощью АРПСС (0,1,1)(1,1,0) рядов H’(НР)(t) (а) иH’(ВР)(t) (б)
Из рисунка 4 видно, что модель адекватно строит прогноз для невозмущенного ряда H’(НР)(t), но не прогнозирует магнитную бурю в ряде H’(ВР)(t). Для проверки адекватности проанализируем временные ряды остатков HО’(НР)(t) и HО’(ВР)(t), АКФ которых приведены на рисунке 5.

Рисунок 5–АКФ остатков для ряда H’(НР)(t) (а) и для ряда H’(ВР)(t) (б)
Из рисунка 5 видно, что остатки для H’(НР)(t) практически не имеют корреляций в то время, как остатки для H’(ВР)(t) имеют достаточно сильные корреляции.
Полученная модель АРПСС, не имеющая возможности прогнозирования возмущений ГМП (прогноз выходит за границы доверительного интервала), и анализ АКФ остатков позволяют сделать вывод о необходимости разработки нового более точного и эффективного метода прогнозагеомагнитных возмущений.
Таким образом, исследована возможность применения мультипликативной модели авторегрессии и проинтегрированного скользящего среднего, были выделены временные ряды, содержащие геомагнитную бурю, и невозмущенные значения вектора напряженности ГМП, из исходных рядов было удалено среднее значение Cи линейный тренд. С помощью применения разностного оператора ряды значений ВН ГМП приведены к стационарному виду и получена модель АРПСС для прогнозирования десяти рядов H’(НР)(t) и десяти рядовH’(ВР)(t); оценены параметры модели и построены прогнозы для каждого из них. Была проведена оценка адекватности прогноза и сделан вывод о неприменимости модели АРПСС для прогнозирования геомагнитных возмущений.
Результаты работы получены при поддержке Минобрнауки РФ в рамках государственного задания на проведение НИОКР, шифр заявки № 8.2935.2011
Рецензенты:
Кириевский Е.В., д.т.н., профессор кафедры «Информационные и измерительные системы и технологии» ФГБОУ ВПО «Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова», г.Новочеркасск.
Гречихин В.В., д.т.н., профессор кафедры «Информационные и измерительные системы и технологии», ФГБОУ ВПО «Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова», г.Новочеркасск.
Библиографическая ссылка
Маркарян Н.Р., Алексанян Г.К., Горбатенко Н.И., Кревченко Ю.Р. ПОСТРОЕНИЕ ПРОГНОЗА ВОЗМУЩЕННОЙ СОСТАВЛЯЮЩЕЙ НАПРЯЖЕННОСТИ ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПОМОЩИ МОДЕЛИ АРПСС ДЛЯ МОБИЛЬНЫХ УСТРОЙСТВ ПРОГНОЗИРОВАНИЯ ГЕОМАГНИТНЫХ ВОЗМУЩЕНИЙ // Современные проблемы науки и образования. 2013. № 5. ;URL: https://science-education.ru/en/article/view?id=10291 (дата обращения: 07.07.2026).