



Механическое торможение подъемных установок выполняет две основные функции: рабочее торможение и предохранительное торможение.
Рабочее торможение обеспечивает: 1) управление скоростью движения, когда для этого требуются тормозные моменты, а система электропривода не может их реализовать; 2) фиксацию подвижных элементов установки в требуемом положении, а также во время пауз при работе.
Предохранительное торможение обеспечивает остановку подъемной машины на возможно коротком пути при нарушениях нормального режима работы.
Увеличение высоты подъема приводит к росту поступательно перемещающихся масс рудничных подъемных установок по сравнению с вращающимися массами, особенно при безредукторных приводах. В связи с этим увеличиваются колебания усилий в канате, вызывающие значительные динамические нагрузки при торможении, появляется нагрев тормозных колодок, снижающий силу трения либо между колодками и тормозным ободом барабана, либо между дисками и барабаном [4, 7].
Анализ каждого из указанных явлений весьма трудоемок и требует проведения большого числа экспериментальных исследований. Вместе с тем параметры, определяющие то или иное явление, входят в основополагающие зависимости в виде безразмерных комплексов, называемых критериями подобия [1, 5, 6,]. Построенные зависимости между критериями подобия позволяют предсказать результаты эксперимента, а также проводить исследования на основе моделирования изучаемых явлений.
В работах [2, 3] на основе анализа уравнения движения рудничных подъемных установок определены критерии подобия для различных динамических режимов. Показано, в частности, что в качестве таких критериев могут выступать: степень неполноты графика скорости «![]() »; относительное время движения «
»; относительное время движения «![]() »; относительное ускорение подъема «
»; относительное ускорение подъема «![]() »; коэффициент асимметрии графика скорости «
»; коэффициент асимметрии графика скорости «![]() »; степень статической неуравновешенности подъема «
»; степень статической неуравновешенности подъема «![]() »; коэффициент, учитывающий условия охлаждения двигателя «
»; коэффициент, учитывающий условия охлаждения двигателя «![]() ».
».
Здесь в соответствии с законами механики в критериальной форме записаны уравнения для динамических режимов при электрическом торможении. Графики, построенные на основе этих уравнений для конкретных числовых значений критериев подобия, являются номограммами подобия [3].
Номограммы подобия позволяют определить не только нагрев двигателя и его пусковую перегрузку «![]() » при тормозных режимах, но и такие относительные показатели подъемной установки, как эквивалентное усилие «
» при тормозных режимах, но и такие относительные показатели подъемной установки, как эквивалентное усилие «![]() », эквивалентная мощность «
», эквивалентная мощность «![]() », а также КПД, учитывающий потерю кинетической энергии при механическом торможении на всем пути замедления для статически уравновешенного подъема в условиях трапецеидального графика скорости.
», а также КПД, учитывающий потерю кинетической энергии при механическом торможении на всем пути замедления для статически уравновешенного подъема в условиях трапецеидального графика скорости.
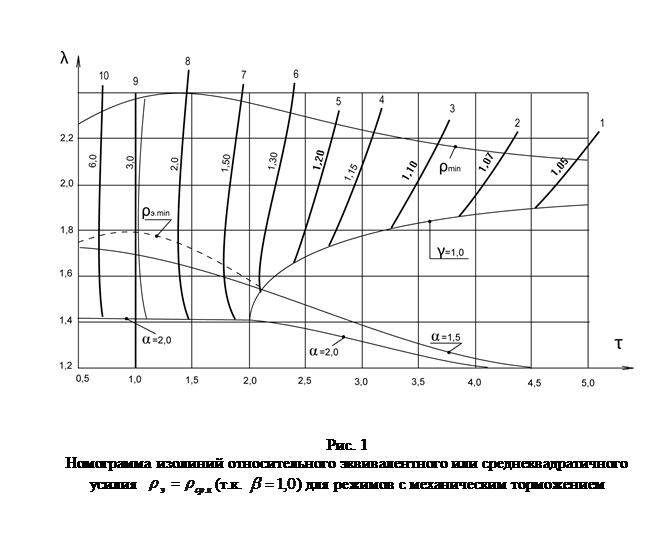
На рис.1 показаны изолинии относительного эквивалентного усилия «![]() » (при значениях
» (при значениях ![]() ,
, ![]() ,
, ![]() ):
):
 , (1)
, (1)
где ![]() – абсолютное эквивалентное усилие подъема,
– абсолютное эквивалентное усилие подъема, ![]() – постоянная составляющая статического усилия.
– постоянная составляющая статического усилия.
Изолинии «![]() » и «
» и «![]() » изображены только для тормозных режимов.
» изображены только для тормозных режимов.
На рис. 2 показаны изолинии эквивалентной мощности «![]() » (при значениях
» (при значениях ![]() ,
, ![]() ,
, ![]() ):
):
 , (2)
, (2)
т.е. ![]() , т.к.
, т.к. ![]() .
.
Для построения изолиний относительной эквивалентной мощности «![]() », задаваясь рядом значений степени неполноты «
», задаваясь рядом значений степени неполноты «![]() », определялись значения квадрата относительного времени «
», определялись значения квадрата относительного времени «![]() », относительного ускорения «
», относительного ускорения «![]() » и пусковой перегрузки двигателя «
» и пусковой перегрузки двигателя «![]() » по одной из нижеприведенных формул:
» по одной из нижеприведенных формул:
 или
или  ,
,
 ,
, ![]() или
или ![]()
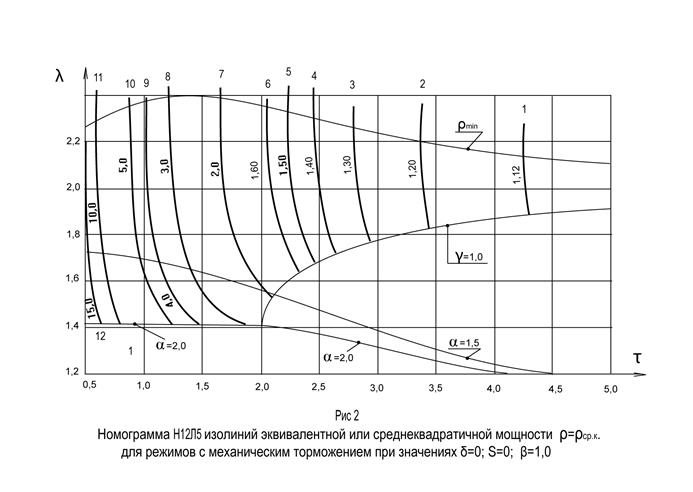
Рис. 2
Номограмма изолиний относительной эквивалентной или среднеквадратичной мощности ![]() (т.к.
(т.к. ![]() ) для режимов с механическим торможением
) для режимов с механическим торможением
По изолинии относительного ускорения «![]() », которая представляет границу областей тормозных и бестормозных режимов, степень неполноты графика скорости «
», которая представляет границу областей тормозных и бестормозных режимов, степень неполноты графика скорости «![]() » определяется по формуле:
» определяется по формуле:
![]() . (3)
. (3)
На рис. 3 показаны изолинии КПД, учитывающего потерю кинетической энергии «![]() » при механическом торможении (при значениях
» при механическом торможении (при значениях ![]() ,
, ![]() ,
, ![]() ):
):
![]() (4)
(4)
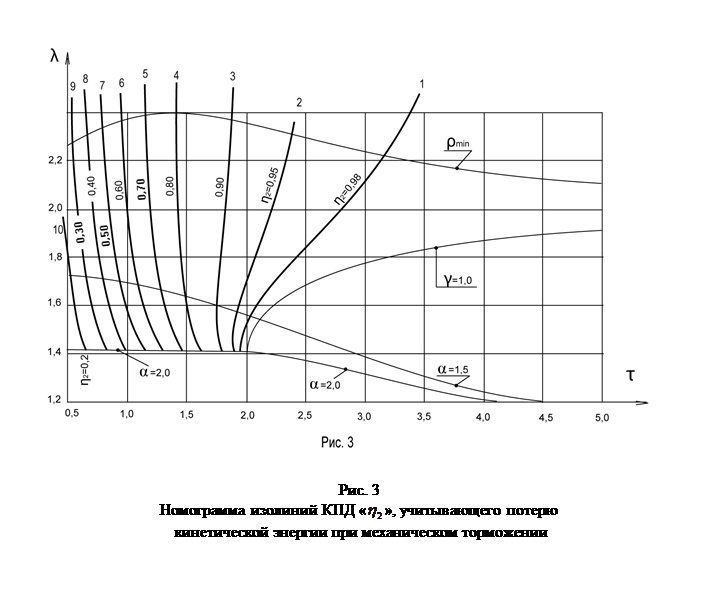
При построении изолиний каждого избранного «![]() », определялись:
», определялись:
постоянная величина ![]() , (5)
, (5)
относительное ускорение ![]() , (6)
, (6)
степень неполноты графика скорости ![]() . (7)
. (7)
Эти координаты позволяют определить относительные параметры, такие как время «![]() », среднеквадратичное усилие «
», среднеквадратичное усилие « ![]() » и пусковую перегрузку двигателя «
» и пусковую перегрузку двигателя «![]() », которые при переводе в абсолютные единицы позволяют выбрать рациональный динамический режим и соответствующий этому режиму подъемный двигатель.
», которые при переводе в абсолютные единицы позволяют выбрать рациональный динамический режим и соответствующий этому режиму подъемный двигатель.
Рецензенты:
Герц Эдуард Федорович, доктор технических наук, профессор, декан лесоинженерного факультета ФГБОУ ВПО «Уральский государственный лесотехнический университет», г. Екатеринбург.
Готлиб Борис Михайлович, доктор технических наук, профессор, заведующий кафедрой «Мехатроники» ФГБОУ ВПО «Уральский государственный университет путей сообщения», г. Екатеринбург.
Библиографическая ссылка
Двинин Л.А., Двинина Л.Б., Ляпцев С.А. КРИТЕРИАЛЬНЫЕ ЗАВИСИМОСТИ ДИНАМИЧЕСКИХ ПОКАЗАТЕЛЕЙ В УСЛОВИЯХ МЕХАНИЧЕСКОГО ТОРМОЖЕНИЯ РУДНИЧНЫХ ПОДЪЕМНЫХ УСТАНОВОК // Современные проблемы науки и образования. 2013. № 4. ;URL: https://science-education.ru/ru/article/view?id=9885 (дата обращения: 02.07.2026).