



Введение
Постоянное развитие технических средств САУ и объединение объектов управления в большие комплексы показывает, что использование только традиционного инструментария при проектировании САУ в настоящее время является недостаточным ввиду сложного характера современных систем управления.
Трудности традиционного подхода к проектированию систем управления заключаются в том, что на этапе составления требований и спецификаций используемые текстовые документы несовершенны при итеративном подходе, физические прототипы на этапе проектирования также несовершенны, сложны и дороги; на этапе реализации при ручной разработке применение других программных средств и человеческие ошибки делают процесс ненадежным, а на этапе проверки традиционное тестирование приводит к обнаружению ошибок лишь в конечной стадии разработки ПО [1].
Эти трудности во многом преодолеваются при использовании технологии модельно-ориентированного проектирования (далее МОП).
Преимущества МОП:
-
снижается себестоимость за счет минимизации использования прототипов, облегчается повторное использование наработок в других проектах;
-
сокращаются сроки проектирования за счет более быстрого ввода в производство и улучшения обмена информацией между группами;
-
улучшаются эксплуатационные качества, что способствует инновациям…[1].
Несмотря на то, что за рубежом при проектировании САУ широко используются моделирующие инструментальные системы, в России все еще преобладают методы и инструментарий предыдущего поколения, а визуальный инструментарий подобных систем применяется ограниченно. На каждом из предприятий, работающем в области проектирования, существует процесс проектирования со своей технологией, иногда весьма сложной и почти всегда неформализованной, с "помехами" при передаче проектной информации, как "внутренней", так и "внешней". Таким образом, при каждом проектном предприятии существует своя организация системы проектирования, которая отражает структуру, функции, иерархию отношений проектировщиков, производственную базу, а также историю традиции и стиль работы этого предприятия [3].
Для успешного использования технологии МОП в инженерной практике в России необходимо включить эти техники в существующие учебные планы в полном объеме. Согласно материалам конгресса INTERNATIONAL FEDERATION OF AUTOMATIC CONTROL (Сеул, 2008) во многих университетах мира в рамках специальности «Системы управления», имеющийся набор курсов и их последовательность, в общей сложности оставались практически неизменными последние 50 лет, несмотря на общий значительный технический прогресс и революцию во многих сферах жизни [4]. В настоящее время в Роуз-Халманском технологическом институте (США) предлагается курс модельно-ориентированного проектирования, созданный профессором Марком Е. Хернитером при поддержке компании TheMathworksInc [5].
Необходимость пересмотра и обогащения дополнительными практическими курсами, воспроизводящими в той или иной степени процесс динамического проектирования существующих теоретико-ориентированных учебных планов и применение деятельностного подхода к обучению [2], является очевидной и чрезвычайно актуальной задачей.
Методическая сущность обучения проектированию САУ в визуальных инструментальных средах, по нашему мнению, заключается в возможности формирования у обучаемого полного представления о процессе проектирования САУ. Причем не должно требоваться дополнительное подробное изучение сложного программного инструментария с отрывом от проектной или учебной задачи. Поэтому важным и целесообразным является достижение баланса концентрации внимания обучаемого между решением задачи проектирования и использованием необходимого для ее решения инструментария. Для быстрого достижения такого баланса необходимо формализованное описание МОП, инвариантное относительно выбранного инструментария.
Для целостного и наглядного восприятия технологических этапов создания и использования имитационной модели САУ в МГТУ им. Н. Э. Баумана на кафедре «Системы автоматического управления» нами для учебных целей разработано формализованное описание процесса МОП САУ. МОП – процесс проектирования, основанный на использовании наглядной имитационной модели будущего изделия, которая является основным носителем информации о его концепции, особенностях конструкции и реализации. Такая модель используется на протяжении всех стадий процесса проектирования: исследование, конструирование, реализация, приемо-сдаточные испытания. На каждом этапе модель обновляется и эволюционирует. При этом гарантируется полное прослеживание состава ее параметров и другой конструкторской информации на всех этапах проектирования [1]. Рабочая модель с точки зрения программно-реализованной инструментальной среды является набором типов данных, в которую вносятся конструкторские изменения по мере ее уточнения и детализации.
В процессе создания модели и последующей ее модификации технология МОП подразумевает обязательные процедуры верификации и валидации. В рамках МОП верификация является внутренним процессом производимым проектировщиками, работающими над рабочей моделью или ее элементами. Валидация может проводиться при необходимости, выполняется методом анализа заданных условий применения и оценки соответствия характеристик модели этим требованиям, а результатом является вывод о возможности применения модели, созданной на данном этапе для конкретных условий проектирования и перехода к следующему этапу.
Количество изменений, внесенных проектировщиком с момента создания модели, может быть очень большим, и во избежание потери последовательности рабочих шагов и для сохранения последовательности внесенных изменений во время проектирования необходимо создавать новые рабочие версии имитационной модели. Это означает, что процесс модельно-ориентированного динамического проектирования САУ дискретный, а внесение изменений, то есть модификация рабочей модели, должны производиться только после проверки правильности работы модели (верификации и/или валидации) на каждом шаге. Различие типов данных и рост числа рабочих копий моделей с разной степенью детализации, а также тесты, проводимые в рамках процедур верификации и валидации, могут серьезно усложнить практическую реализацию технологии МОП в производстве и создать еще большие трудности в ее освоении обучающимися в ВУЗах.
Для решения первой задачи в МГТУ им. Н. Э. Баумана нами разработана информационная система поддержки проектов MatlabProjectExplorer. MatlabProjectExplorer позволяет запоминать действия проектировщика, связанные с модификацией модели, осуществлять контроль за состоянием каждой версии рабочей модели, запоминать каждый этап процесса проектирования, на основе последовательности этапов автоматически строить «технологическую карту» процесса проектирования. Для решения задачи обучения и облегчения восприятия основных концепций технологии МОП нами предложена формальная модель процесса МОП, представленная ниже.
Последовательность действий проектировщика и внесенных изменений в имитационную модель в процессе проектирования САУ в визуальной среде можно описать с помощью сети переходов:
![]() , где
, где
![]() – вектор входных параметров сети – множества целей, для достижения которых производятся изменения в рабочей модели,
– вектор входных параметров сети – множества целей, для достижения которых производятся изменения в рабочей модели,
![]() – вектор выходных параметров сети - множества действий, выполняемых в каждом состоянии процесса проектирования для внесения изменений в рабочую модель, чтобы достигнуть цели из
– вектор выходных параметров сети - множества действий, выполняемых в каждом состоянии процесса проектирования для внесения изменений в рабочую модель, чтобы достигнуть цели из![]() ,
,
![]() – регистровая память набора поставленных целей из
– регистровая память набора поставленных целей из![]() ,
,
![]() – вектор множества логических условий (условий прохождения верификации и валидации) перехода из одного состояния процесса проектирования в другое,
– вектор множества логических условий (условий прохождения верификации и валидации) перехода из одного состояния процесса проектирования в другое,
![]() – вектор состояний процесса проектирования, характеризующий степень детализации и усложнения рабочей модели проектируемого объекта и САУ,
– вектор состояний процесса проектирования, характеризующий степень детализации и усложнения рабочей модели проектируемого объекта и САУ,
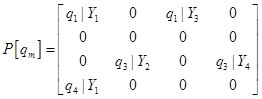
![]() – матрица переходов.
– матрица переходов. ![]() – функция переходов.
– функция переходов.
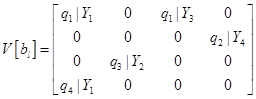
![]() – матрица выходов сети.
– матрица выходов сети. ![]() – функция выходов.
– функция выходов.
Матрицы переходов и выходов заполняются номерами состояний и номерами выходных процедур – компонент вектора B, представляющих собой описания действий, выполняемых в каждом состоянии процесса проектирования для внесения изменений в рабочую модель.
 ,
, 
Развитие визуальных инструментальных сред для проектирования САУ идет по пути пополнения библиотек готовых имитационных моделей существующих элементов или готовых технических средств объектов управления и новых процедур. С точки зрения инструментальной среды во время проектирования имеется набор разных моделей одного и того же объекта или его компонентов, для которых проектируется САУ. При этом разные версии рабочей модели могут отличаться и, как правило, отличаются наличием разных готовых элементов библиотек используемой инструментальной среды. Для запоминания использованного инструментария необходимо добавить причинно-следственную семантическую сеть, которая будет показывать соответствие между заданными элементами рабочей модели и программно-реализованными библиотеками инструментальной среды. Инструментальная среда MathworksMatlab с Simulink представима набором ![]() . Он состоит из
. Он состоит из ![]() – Множества инструментов
– Множества инструментов
![]() – подмножество тулбоксов;
– подмножество тулбоксов; ![]() – подмножество блоксетов;
– подмножество блоксетов; ![]() – подмножество процедур;
– подмножество процедур; ![]() – подмножество функций;
– подмножество функций;
![]() – Множества готовых моделей;
– Множества готовых моделей;
![]() – Множества моделей созданных проектировщиков;
– Множества моделей созданных проектировщиков;
![]() – Множества драйверов поддерживаемого средой оборудования
– Множества драйверов поддерживаемого средой оборудования
![]() – подмножество адаптеров;
– подмножество адаптеров; ![]() – подмножество стандартных устройств и интерфейсов;
– подмножество стандартных устройств и интерфейсов;
![]() – Множества типов данных, определенных средой.
– Множества типов данных, определенных средой.
![]() – подмножество типов данных «модель Simulink»;
– подмножество типов данных «модель Simulink»; ![]() – подмножество типов данных «м-файл»;
– подмножество типов данных «м-файл»; ![]() – подмножество типов «рисунок»;
– подмножество типов «рисунок»; ![]() – подмножество файлов «рабочего пространства»;
– подмножество файлов «рабочего пространства»;
![]() – подмножества сгенерированных текстов кодов;
– подмножества сгенерированных текстов кодов;
![]() – подмножества запускаемых файлов.
– подмножества запускаемых файлов.
Элементы ![]() являются вершинами семантической сети, а связи «IS_A» или «A_PART_OF», показывающие связь рабочей модели со средой, ребрами семантической сети.
являются вершинами семантической сети, а связи «IS_A» или «A_PART_OF», показывающие связь рабочей модели со средой, ребрами семантической сети.
В качестве примера, на который распространяется предложенная формальная модель процесса проектирования САУ в визуальных инструментальных средах, рассмотрим процедуры, связанные с постановкой полунатурного эксперимента. Объектом управления служит система двигатель – генератор – нагрузка [5]. Перед осуществлением полунатурных испытаний оговоримся, что имеется разработанная и проверенная модель объекта управления и синтезирован предполагаемый закон регулирования. Это означает, что с точки зрения модели процесса проектирования ![]() пройдено определенное количество состояний процесса проектирования и будет рассмотрена только часть сети переходов и семантической сети, связанная с полунатурным экспериментом.
пройдено определенное количество состояний процесса проектирования и будет рассмотрена только часть сети переходов и семантической сети, связанная с полунатурным экспериментом.
Разделим постановку эксперимента полунатурного моделирования на несколько этапов:
-
Реализация регулятора на целевом оборудовании FreeScaleMPC5554.
-
Реализация модели объекта управления на целевой машине с xPCtarget.
-
Тестирование объекта с аналоговыми входами/выходами и проверка его работоспособности.
-
Соединение объекта управления и регулятора.
-
Тестирование всей системы.
Это означает, что будет необходимо совершить пять переходов по сети. Опишем все действия проектировщика в терминах ![]() .
.
Реализация регулятора
![]() : «построение модели регулятора для целевой машины».
: «построение модели регулятора для целевой машины».
![]() : «выбор и добавление блоков – элементов модели регулятора».
: «выбор и добавление блоков – элементов модели регулятора».
![]() : «наличие соединений между выбранными элементами» & «правильность их соединения» & «успешная загрузка в целевое оборудование».
: «наличие соединений между выбранными элементами» & «правильность их соединения» & «успешная загрузка в целевое оборудование».
![]() :
: ![]() -е.
-е.
![]() :
: ![]() -е.
-е.
Реализация модели объекта управления на целевой машине xPCtarget
![]() : «адаптация модели объекта управления для целевой машины с xPCtarget».
: «адаптация модели объекта управления для целевой машины с xPCtarget».
![]() : «выбор и добавление блоков xPCtarget для связи модели с реальным оборудованием обработки и преобразования сигналов».
: «выбор и добавление блоков xPCtarget для связи модели с реальным оборудованием обработки и преобразования сигналов».
![]() : «наличие соединений между выбранными элементами» & «правильность их соединения с точки здравого смысла» & «успешная компиляция» & «загрузка в целевое оборудование».
: «наличие соединений между выбранными элементами» & «правильность их соединения с точки здравого смысла» & «успешная компиляция» & «загрузка в целевое оборудование».
![]() :
: ![]() -е.
-е.
![]() :
: ![]() -е.
-е.
Тестирование объекта с аналоговыми входами/выходами и проверка его работоспособности
![]() : «адаптация модели объекта управления с реальной физической средой».
: «адаптация модели объекта управления с реальной физической средой».
![]() : «Подключение к входам и выходам внешнего сигнала».
: «Подключение к входам и выходам внешнего сигнала».
![]() : «правильность масштабирования входов» & «правильность масштабирования выходов»
: «правильность масштабирования входов» & «правильность масштабирования выходов»
![]() :
: ![]() -е.
-е.
![]() :
: ![]() -е.
-е.
Соединение объекта управления и регулятора
![]() : «Сборка стенда для полунатурных испытаний».
: «Сборка стенда для полунатурных испытаний».
![]() : «Соединение пар входов/выходов объекта управления и регулятора».
: «Соединение пар входов/выходов объекта управления и регулятора».
![]() : «соблюдение техники безопасности» & «правильность соединения входов/выходов».
: «соблюдение техники безопасности» & «правильность соединения входов/выходов».
![]() :
: ![]() -е.
-е.
![]() :
: ![]() -е.
-е.
Тестирование всей системы
![]() : «Осуществление полунатурных испытаний».
: «Осуществление полунатурных испытаний».
![]() : «Разработка и проведение всех необходимых тестов».
: «Разработка и проведение всех необходимых тестов».
![]() : «успех теста 1» & «успех теста 2» &…& «успех теста m».
: «успех теста 1» & «успех теста 2» &…& «успех теста m».
![]() :
: ![]() -е.
-е.
![]() :
: ![]() -е.
-е.
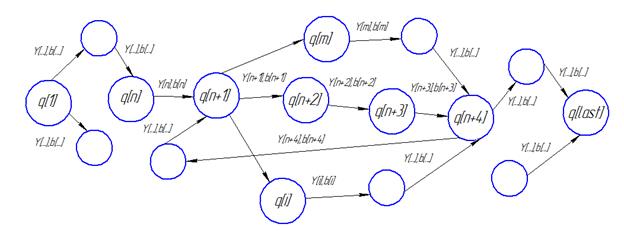
Рис.1. Общий вид сети переходов
Помимо описанного набора состояний, возможны альтернативные цепочки шагов ![]() и
и ![]() , связанных с организацией полунатурного эксперимента. Они могут показывать использование другого целевого оборудования (NationalInstrumentsPXI) для моделирования объекта в режиме жесткого реального времени. Неудачные результаты тестирования системы могут привести к доработке имитационной модели, на что указывает возврат по условиям
, связанных с организацией полунатурного эксперимента. Они могут показывать использование другого целевого оборудования (NationalInstrumentsPXI) для моделирования объекта в режиме жесткого реального времени. Неудачные результаты тестирования системы могут привести к доработке имитационной модели, на что указывает возврат по условиям ![]() c набором действий
c набором действий ![]() на предыдущие шаги. Рассмотрим описание инструментария на одном из шагов.
на предыдущие шаги. Рассмотрим описание инструментария на одном из шагов.
Модель объекта управления на этапе ![]() состоит из подсистем моделей двигателя, генератора, кодирующего устройства соединительной муфты с трением, корпуса, установки начальных условий. Муфта, корпус и начальные условия – элементы SimScape. Модель также имеет в своем составе блоки xPCtargetscope из одноименного тулбокса. На верхнем уровне модели добавлены блоки поддержки реальной аппаратуры.
состоит из подсистем моделей двигателя, генератора, кодирующего устройства соединительной муфты с трением, корпуса, установки начальных условий. Муфта, корпус и начальные условия – элементы SimScape. Модель также имеет в своем составе блоки xPCtargetscope из одноименного тулбокса. На верхнем уровне модели добавлены блоки поддержки реальной аппаратуры.
По описанию модели объекта управления на шаге ![]() строится причинно-следственная семантическая сеть. Инструментарий MathworksMatlab в ней представлен в форме
строится причинно-следственная семантическая сеть. Инструментарий MathworksMatlab в ней представлен в форме ![]() . Высказывание можно расширить описанием содержимого подсистем: «генератор», «двигатель» и «кодирующее устройство». А так как эта модель была взята из предыдущих шагов перед ее доработкой, то предполагается, что эти элементы уже описаны.
. Высказывание можно расширить описанием содержимого подсистем: «генератор», «двигатель» и «кодирующее устройство». А так как эта модель была взята из предыдущих шагов перед ее доработкой, то предполагается, что эти элементы уже описаны.
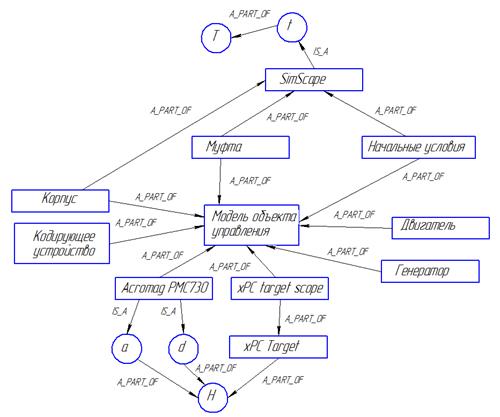
Рис. 2. Семантическая сеть, показывающая использованный инструментарий
Вершины сети в форме окружностей не раскрыты в описании данного этапа и взяты из описания инструментария в форме ![]() . Аналогичным образом описываются все предыдущие и следующие шаги.
. Аналогичным образом описываются все предыдущие и следующие шаги.
Данные для каждого состояния q вводятся в систему логического вывода и представляют собой экстенсиональную модель процесса проектирования САУ заданной системы в заданной визуальной среде MathworksMatlab.
Система логического вывода, реализованная в MatlabProjectExplorer, состоит из двух систем: сети переходов и семантической сети. Обе системы работают на основе запросов на существование:
- действия выполненного с моделью;
- цели на заданном этапе;
- теста, проводимого с рабочей моделью объекта управления и САУ;
-состояния рабочей модели (степени ее детализации) по его описанию;
-использованного инструмента среды;
-типа данных инструментальной среды в рамках данного проекта по разработке САУ.
Конструктивно программное обеспечение реализовано на языке высокого уровня Delphiс использованием свободно распространяемого ПО СУБД MySQL.
Заключение
Внедрение МОП в инженерную практику в России является неотложной задачей. В связи с этим необходимо введение курса МОП в инженерное образование. Для решения этой задачи необходимо структурирование учебного процесса в соответствии с деятельностью инженера специалиста, способного выполнять проекты в визуальных инструментальных средах. Для успешной реализации процесса обучения МОП САУ нами разработано формализованное описание процесса проектирования.
Предложенное формализованное описание процесса проектирования САУ в визуальных инструментальных средах и программное обеспечение позволяют:
- сформировать точное представление о проектировании САУ в визуальных инструментальных средах;
- выявить основные принципы и закономерности, появляющиеся в процессе проектирования;
- эффективно адаптировать проектные задачи для различных инструментальных систем;
- определить основные отличия от традиционных способов проектирования;
- в полной мере использовать современные инструментальные средства, отслеживая их постоянное обновление;
- выработать эффективную методику освоения и внедрения технологий МОП САУ в визуальных инструментальных средах в прикладную инженерную деятельность;
- усовершенствовать программы прикладных дисциплин в технических ВУЗах.
Рецензенты:
Квятковская Ирина Юрьевна, д-р техн. наук, директор «Института информационных технологий и коммуникаций» (ИИТиК) ФГБОУ ВПО АГТУ, г. Астрахань.
Попов Георгий Александрович, д-р техн. наук, зав. кафедрой «Информационная безопасность» ФГБОУ ВПО АГТУ, г. Астрахань.
Библиографическая ссылка
Талукдер Ю.З. МОДЕЛЬНО-ОРИЕНТИРОВАННОЕ ПРОЕКТИРОВАНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В ИНЖЕНЕРНОМ ОБРАЗОВАНИИ // Современные проблемы науки и образования. 2013. № 3. ;URL: https://science-education.ru/ru/article/view?id=9573 (дата обращения: 30.06.2026).