



Введение
Результаты исследования, приведённые в статье, отражают субъективное представление автора о влиянии «человеческого фактора» на процесс управления сложной технической системой, такой как судно. Поэтому настоящую статью следует рассматривать как попытку обоснования и описания новой методики учёта субъективных особенностей («человеческого фактора») оператора-судоводителя на процесс управления судном.
Цель исследования
Обоснование методики учёта «человеческого фактора» на процесс управления сложной технической системой – судном.
Материал исследования
К сложным системам относятся человеко-машинные системы, например, такие как «оператор-судно». Моделирование этих систем затруднено рядом причин:
- необходимость формализации поведения субъектов («человеческого фактора»);
- наряду с детерминированными в человеко-машинных системах существенную роль играют стохастические процессы;
- неотъемлемой частью таких систем являются процессы принятия решений, зависящие от психоэмоционального состояния оператора.
По данным, изложенным в [4], на принятие решений оператором-судоводителем влияют следующие факторы: время, погодные условия, технические условия, ограниченное пространство, опыт, эмоциональное состояние, психологические качества, внимание, знания, взаимодействия экипажа. Из перечисленных факторов, по-нашему мнению, можно выделить группу, которая характеризует понятие «человеческий фактор». В эту группу входят представленные в осреднённом процентном соотношении следующие факторы:
- психологические качества морского специалиста как личности – 23 %;
- уровень профессиональной подготовки – 8 %;
- опытность морского специалиста – 23 %.
Таким образом, статистические данные свидетельствуют, что на принятие решений оператором-судоводителем большое влияние оказывает «человеческий фактор», который составляет более 50 % от числа всех факторов.
Статистика аварий с морскими судами показывает, что ни автоматизация, ни современные приборы навигации, т.е. то, что относится к понятию технической системы, не гарантируют полной безопасности движения. И основной причиной аварий является «человеческий фактор». По статистическим данным Федерального агентства морского и речного транспорта на долю этого фактора в целом приходится около 80 % различных коллизий на морском транспорте.
Практический пример. Наглядный практический пример значимости «человеческого фактора» в безопасности мореплавания показывает случай на дизель-электроходе «Обь» (капитан Иван Александрович Ман) во время второй советской антарктической экспедиции, наблюдённый и описанный В. В. Вейхманом [2, 3].
«“Обь” следовала к Мирному, чтобы передать зимовщикам полученные для них в Кейптауне продукты и забрать часть сезонного состава экспедиции…
Море Дейвиса уже заполнилось битым льдом, среди которого паслись высокие столообразные айсберги. Днем еще ничего, но пора круглосуточного полярного дня уже закончилась, и ночью была темень сплошная. “Обь” пробивалась через ледяные поля, обходя айсберги. Мощные прожектора, лучи которых были направлены прямо по курсу, лишь на небольшое расстояние просвечивали несущуюся наискосок крупу снежных зарядов.
Иван Александрович, капитан, и вахтенный помощник капитана поочередно, то приникали к тубусу радиолокационной станции, то вместе с нами, впередсмотрящими, напряженно вглядывались в снежное крошево пурги. В темноте рулевой рубки слабо светились шкалы приборов, царило тревожное молчание, лишь изредка прерываемое указаниями рулевому – изменить курс, чтобы пройти в разводье между ледяными полями или обойти небольшой айсберг. Надо было спешить – нельзя предугадать, когда льдины смерзнутся и станут непроходимы…
Капитан, глядевший вперед в бинокль, вдруг скомандовал:
– Стоп машина!
И через полминуты:
– Средний ход назад!
И только после прямо по носу лучи прожекторов уперлись в отвесную и ровную, гладкую, как срезанную ножом поверхность ледяной стены огромного айсберга, уходящую вправо и влево куда-то в бесконечность. Два вопроса назойливо крутились в моей голове: первый – как капитан разглядел по курсу судна ледяной барьер, а мы его не увидели, и второй – почему ничего не показал радиолокатор?
Я осмелился и задал первый вопрос Ивану Александровичу. Ответ удивил еще больше:
– Ничего я не увидел, но мне какое-то внутреннее убеждение подсказало, что надо остановить движение. Так всегда следует поступать: если в чем-то сомневаешься – остановись, осмотрись, и только после этого осторожно двигайся дальше».
Влиянию «человеческого фактора» на принятие решений по управлению движением судна посвящено немало исследований. Однако до сих пор этот вопрос остается малоизученным. По-прежнему актуальна задача выявления и оценки навигационных факторов, которые оператор-судоводитель использует при управлении сложной технической системой – судном.
Для определения перечня навигационных факторов достаточно воспользоваться известной в теории управления судном системой уравнений, описывающей движение судна относительно объекта маневра:
![]() (1)
(1)
![]() (2)
(2)
где ![]() – скорость изменения дистанции между судном и объектом маневра;
– скорость изменения дистанции между судном и объектом маневра; ![]() – скорость объекта маневра; П - пеленг;
– скорость объекта маневра; П - пеленг; ![]() – скорость судна; КУ - курсовой угол; D – дистанция;
– скорость судна; КУ - курсовой угол; D – дистанция; ![]() - скорость изменения пеленга.
- скорость изменения пеленга.
Величины, входящие в уравнения (1) и (2), характеризуют взаимное перемещение маневрирующего объекта (судна) и объекта маневра и поэтому могут использоваться в качестве основных навигационных факторов.
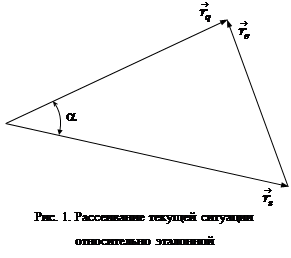
Для количественной оценки динамики изменения параметров текущих навигационных факторов относительно заданной эталонной ситуации каждый из них можно представить в виде радиус-вектора ![]() (см. рис. 1). Эталонную ситуацию также можно представить в виде радиус-вектора
(см. рис. 1). Эталонную ситуацию также можно представить в виде радиус-вектора ![]() и охарактеризовать среднестатистическими нормативными параметрами навигационных факторов для заданной (эталонной) ситуации. Тогда рассогласование между
и охарактеризовать среднестатистическими нормативными параметрами навигационных факторов для заданной (эталонной) ситуации. Тогда рассогласование между ![]() и
и ![]() покажет рассеивание текущей ситуации, которое также представлено в виде радиус-вектора
покажет рассеивание текущей ситуации, которое также представлено в виде радиус-вектора ![]() . Модуль
. Модуль ![]() в безразмерном виде рассчитывается по формуле (3), которую можно получить из рис. 1:
в безразмерном виде рассчитывается по формуле (3), которую можно получить из рис. 1:

где rq - текущее значение i-го фактора; rs - заданное (эталонное) значение i-го фактора; sq - средняя квадратическая погрешность i-го фактора текущей ситуации; ss - средняя квадратическая погрешность i-го фактора эталонной ситуации; a - угол между ![]() и
и ![]() во временной мере.
во временной мере.
Через заданные промежутки времени рассчитываются коэффициенты корреляции между углом перекладки руля ![]() и модулем радиус-вектора
и модулем радиус-вектора ![]() по каждому фактору (кроме скоростей, т.к. реверс в настоящей статье не рассматривается)
по каждому фактору (кроме скоростей, т.к. реверс в настоящей статье не рассматривается) ![]() . Затем строится диаграмма графиков оценки коэффициентов корреляции и по ней путём сравнения с эталонной диаграммой производится оценка навигационных факторов.
. Затем строится диаграмма графиков оценки коэффициентов корреляции и по ней путём сравнения с эталонной диаграммой производится оценка навигационных факторов.
Таким образом, по сути, предлагается способ статистического анализа временных рядов значений модулей радиус-вектора ![]() навигационных факторов с использованием функции корреляции
навигационных факторов с использованием функции корреляции ![]() , рассчитываемой по предлагаемому правилу. Тем самым выявляются структура этих рядов и соответственно основные навигационные факторы. Если данные случайны, то корреляция должна быть близка к нулю для любого значения
, рассчитываемой по предлагаемому правилу. Тем самым выявляются структура этих рядов и соответственно основные навигационные факторы. Если данные случайны, то корреляция должна быть близка к нулю для любого значения ![]() . Если данные не случайны, то отличаться от нуля, что должно указывать на скрытую зависимость перекладки руля (принимаемого оператором решения) от какого-либо навигационного фактора. В этом состоит сущность предлагаемой методики, т.е. в установлении скрытой зависимости, которая будет свидетельствовать о предпочтении оператором какого-либо навигационного фактора другим подобным факторам. Таким способом можно отобрать переменные (факторы) для последующего анализа, в качестве которого целесообразно использовать кросс-корреляцию и автокорреляцию.
. Если данные не случайны, то отличаться от нуля, что должно указывать на скрытую зависимость перекладки руля (принимаемого оператором решения) от какого-либо навигационного фактора. В этом состоит сущность предлагаемой методики, т.е. в установлении скрытой зависимости, которая будет свидетельствовать о предпочтении оператором какого-либо навигационного фактора другим подобным факторам. Таким способом можно отобрать переменные (факторы) для последующего анализа, в качестве которого целесообразно использовать кросс-корреляцию и автокорреляцию.
Результаты исследования
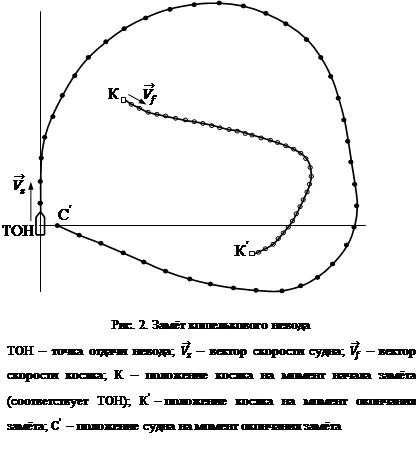
Для проверки теоретических выкладок проведён компьютерный эксперимент путём моделирования сложной ситуации, вызывающей напряжённость психоэмоционального состояния человека. Операторам, участвовавшим в эксперименте, предлагалось выполнить замёт кошелькового невода. Суть этого процесса заключается в том, что судно за отведённое время должно окружить кошельковым неводом (орудие лова) ограниченной длины движущийся живой объект – косяк рыбы и завершить процесс (остановиться) в точке отдачи невода или близкой к ней.
Компьютерное моделирование замёта осуществлялось с помощью программы-тренажёра кошелькового лова [1]. На рис. 2 показаны траектории движения судна и косяка рыбы, полученные в результате моделирования замёта с помощью этой программы. Параметры эталонной (исходной) ситуации: D = 164 м; П = 280°; КУ = 303°; ![]() = - 1,18 м/с;
= - 1,18 м/с; ![]() = 0,0087 с-1;
= 0,0087 с-1; ![]() = 0,0192 c-1.
= 0,0192 c-1.
В результате маневрирования при решении поставленной задачи, выполненного экспертом – опытным капитаном, получена диаграмма графиков оценки коэффициентов корреляции по углу перекладки руля и навигационным факторам (см. рис. 3). При этом в процессе маневрирования судно совершило движение за отведённое время, с заданными параметрами и выполнило поставленную задачу. Полученная диаграмма принята в качестве эталона (паттерна) для сравнительного анализа с диаграммами других, менее опытных, операторов.
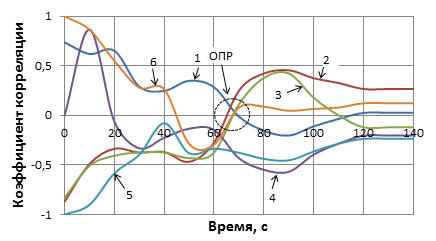

Сложный вид графиков, изображённых на эталонной диаграмме, может говорить о высоком психоэмоциональном напряжении оператора-эксперта во время маневрирования при выполнении поставленной задачи. Тем не менее на этой диаграмме можно выделить некоторые закономерности: корреляция может быть как положительная, так и отрицательная; значения корреляции по некоторым факторам значительно отличаются от нуля; выделяется область с центром на оси абсцисс или близко к ней, в которой корреляция также по некоторым факторам меняет свой знак и величину – область принятия решения (ОПР). На диаграмме эта область изображена условно и обозначена пунктирной окружностью.
Основной постулат. В основу идеи построения эталонной диаграммы положен очевидный постулат: принятие решения опытным оператором-экспертом выражается в перекладывании руля или реверсе (см. практический пример). Для обычного оператора (не эксперта) принятый постулат не приемлем, т.к. малоопытный оператор (вахтенный помощник капитана) может перекладывать руль или реверсировать главный двигатель случайным образом или вообще не предпринимать никаких требуемых в сложившейся ситуации действий (см. практический пример). Соответственно возникает вопрос о том, как определить момент принятия решения таким оператором.
Учитывая тот факт, что любое психологическое проявление, в том числе и принятие решения оператором, имеет физиологическую основу, для ответа на поставленный вопрос целесообразно использовать физиологические методы. Одной из физиологических характеристик человека является кожно-гальваническая реакция (КГР), которая характеризует изменение электрического сопротивления кожи (электрокожного сопротивления). КГР является одним из наиболее эффективных способов регистрации возникновения эмоциональной напряжённости, связанной с принятием решения, оператора [5, 6]. Резкое падение сопротивления кожи является показателем эмоциональной активации в момент принятия решения [6]. Соответственно можно предположить, что та же самая динамика кожно-гальванической реакции (см. рис. 4) покажет момент принятия решения оператором, управляющим сложной технической системой – судном.
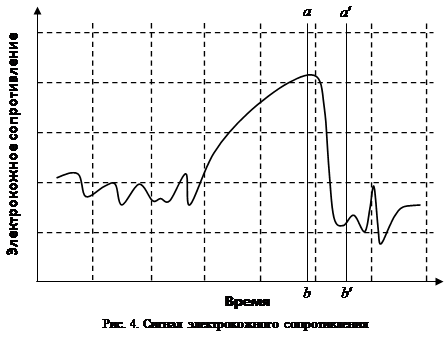
На рис. 4 интервал времени между линиями ab и a¢b¢ соответствует моменту принятия решения оператором-судоводителем в сложной ситуации при управлении судном. Тогда для построения диаграммы графиков оценки коэффициентов корреляции оператора, не обладающего достаточным опытом для выполнения поставленной задачи, рационально рассчитывать коэффициенты корреляции между сигналом электрокожного сопротивления ![]() и модулем радиус-вектора
и модулем радиус-вектора ![]() по каждому фактору, т.е.
по каждому фактору, т.е. ![]() .
.
Диаграмма графиков оценки коэффициентов корреляции по ![]() и каждому навигационному фактору оператора (не эксперта), полученная при моделировании той же самой сложной ситуации, что и при построении диаграммы оператора-эксперта, приведена на рис. 5.
и каждому навигационному фактору оператора (не эксперта), полученная при моделировании той же самой сложной ситуации, что и при построении диаграммы оператора-эксперта, приведена на рис. 5.
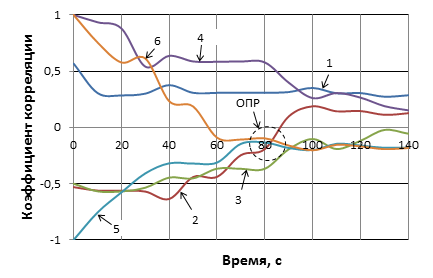

Диаграмма графиков оценки коэффициентов корреляции по ![]() и каждому навигационному фактору оператора (не эксперта), полученная при моделировании той же самой сложной ситуации, что и при построении диаграммы оператора-эксперта, приведена на рис. 5.
и каждому навигационному фактору оператора (не эксперта), полученная при моделировании той же самой сложной ситуации, что и при построении диаграммы оператора-эксперта, приведена на рис. 5.
Заключение
Сравнительный анализ диаграмм операторов-экспертов и менее опытных операторов позволил сделать следующие предварительные выводы:
1. При управлении движением судна оператор-судоводитель руководствуется факторами, использование которых продиктовано опытом их применения на практике. Как правило, опытный оператор использует в качестве основных навигационных факторов те из них, которые характеризуют направление – КУ, П (см. рис. 3). Менее опытный оператор отдал предпочтение дистанции и скорости изменения дистанции (см. рис. 5).
2. В начальной стадии маневрирования оператор-судоводитель, очевидно, произвольно, путём перебора, «подбирает» навигационные факторы для управления. Об этом может говорить неустойчивый характер кривых, изображенных на диаграммах. Этот этап условно можно охарактеризовать как этап формирования принятия решения.
3. В определённый промежуток времени, соответствующий ОПР на диаграмме (см. рис.4 и рис. 5), оператор-судоводитель «переосмысливает» ситуацию и выбирает в качестве основных те факторы, которые в конечном итоге способствуют решению поставленной задачи. Об этом может говорить переход от отрицательной корреляции к положительной. Продолжительность наступления этого момента зависит от субъективных особенностей оператора («человеческого фактора») и сложности решаемой задачи. У опытного оператора ОПР выражена сильнее, чем у менее опытного, который, как показывает рис. 5, в этой области предпринял лишь слабую попытки использовать для управления КУ.
Исследование выполнено при поддержке Программы «Научный фонд» ДВФУ.
Рецензенты:
Лентарёв Александр Андреевич, д-р техн. наук, профессор, профессор кафедры судовождения ФБОУ ВПО «Морской государственный университет имени адмирала Г. И. Невельского», г. Владивосток.
Завьялов Виктор Валентинович, д-р техн. наук, профессор, профессор кафедры технических средств судовождения ФБОУ ВПО «Морской государственный университет имени адмирала Г. И. Невельского», г. Владивосток.
Библиографическая ссылка
Фадюшин С.Г. КОРРЕЛЯЦИОННЫЙ АНАЛИЗ НАВИГАЦИОННЫХ ФАКТОРОВ УПРАВЛЕНИЯ СЛОЖНОЙ СИСТЕМОЙ НА ОСНОВЕ СИГНАЛА ЭЛЕКТРОКОЖНОГО СОПРОТИВЛЕНИЯ ОПЕРАТОРА // Современные проблемы науки и образования. 2013. № 3. ;URL: https://science-education.ru/ru/article/view?id=9408 (дата обращения: 30.06.2026).