



В настоящее время геоинформационные системы нашли широкое применение в различных областях деятельности. Как правило, в геоинформационных системах границы областей и фронтов распространения различных физических процессов, линии уровня рельефа местности, траектории движения подвижных объектов и т.д. отображаются на карте с помощью сплайн-интерполяции выбранного порядка по упорядоченному множеству ![]() , состоящему из N точек (N - большое число). Причем многие из этих точек являются избыточными и могут быть выведены из базы данных без существенной потери точности интерполяции.
, состоящему из N точек (N - большое число). Причем многие из этих точек являются избыточными и могут быть выведены из базы данных без существенной потери точности интерполяции.
В этой связи актуальной становится задача определения упорядоченного набора M точек из первоначального множества точек ![]() , (
, (![]() ). В качестве критерия выбора точек рационально поставить условие минимизации площади, находящейся между линией, построенной по M упорядоченным точкам (линия
). В качестве критерия выбора точек рационально поставить условие минимизации площади, находящейся между линией, построенной по M упорядоченным точкам (линия ![]() ), и линии, построенной по N упорядоченным точкам (линия
), и линии, построенной по N упорядоченным точкам (линия ![]() ). Такой критерий эквивалентен интегралу квадрата отклонения точек линии
). Такой критерий эквивалентен интегралу квадрата отклонения точек линии ![]() от соответствующих точек линии
от соответствующих точек линии ![]() (рис. 1).
(рис. 1).

Рис. 1. Пример формирования линии ![]() .
.
Для примера: N=11, M=6.
Пусть ![]() , – число точек множества
, – число точек множества ![]() между точками множества
между точками множества ![]() , тогда справедливы следующие соотношения:
, тогда справедливы следующие соотношения:
1. ![]() - первые и последние точки множеств
- первые и последние точки множеств ![]() и
и ![]() совпадают;
совпадают;
2. ![]() - узловые точки линий
- узловые точки линий ![]() и
и ![]() совпадают.
совпадают.
Так как узловые точки совпадают, то общая площадь между линиями может быть представлена в виде суммы площадей, заключенных между узловыми точками. При этом критерий оптимизации выбора точек из множества ![]() запишем в виде суммы
запишем в виде суммы
![]()
![]() (1)
(1)
где ![]()
![]() - площадь фигуры, находящейся между узловыми точками.
- площадь фигуры, находящейся между узловыми точками. ![]() .
.
Так как общее число точек множества ![]() равно
равно ![]() , то нетрудно заключить, что если первые
, то нетрудно заключить, что если первые ![]() точек последовательностей совпадают, то интервал между последними точками
точек последовательностей совпадают, то интервал между последними точками ![]() и
и ![]() будет содержать
будет содержать ![]() точек множества
точек множества ![]() , и, наоборот, если последние
, и, наоборот, если последние ![]() точек последовательностей совпадают, то интервал между первыми точками
точек последовательностей совпадают, то интервал между первыми точками ![]() и
и ![]() будет содержать
будет содержать ![]() точек множества
точек множества ![]() . Кроме того, общее число точек – N. Таким образом, ограничения, накладываемые на аргумент оптимизации, будут иметь вид:
. Кроме того, общее число точек – N. Таким образом, ограничения, накладываемые на аргумент оптимизации, будут иметь вид:
![]() ,
, ![]() - целое число. (2)
- целое число. (2)
![]() . (3)
. (3)
Представление критерия (1) в виде суммы дает основание использовать принцип метода дискретного динамического программирования [3; 4].
Решение данной оптимизационной задачи удобно представить в виде ограниченного графа на сетке решений (рис. 2) [2; 5].
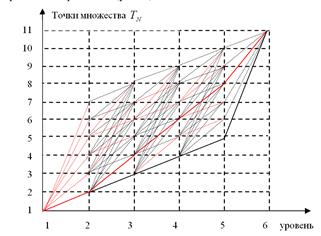
Рис. 2. Граф решения задачи методом дискретного динамического программирования.
Для примера: ![]()
Красной пунктирной линией отмечены «условно» оптимальные пути,
красной линией отмечен оптимальный путь.
По горизонтальной оси будем откладывать уровни решения задачи, причем число уровней соответствует числу точек множества ![]() ; по вертикальной оси – точки множества
; по вертикальной оси – точки множества ![]() , в которые можно попасть на i-м уровне. Очевидно, в силу ограничений (2) и (3), каждый уровень (кроме первого и последнего) содержит
, в которые можно попасть на i-м уровне. Очевидно, в силу ограничений (2) и (3), каждый уровень (кроме первого и последнего) содержит ![]() точек.
точек.
Так как на первом уровне имеется единственная точка ![]() , то в точку
, то в точку ![]() второго уровня возможно попасть только единственным путем
второго уровня возможно попасть только единственным путем ![]() (рис. 2). При этом каждой точке уровня 2 будет соответствовать площадь фигуры
(рис. 2). При этом каждой точке уровня 2 будет соответствовать площадь фигуры ![]() , опирающейся на хорду между точками
, опирающейся на хорду между точками ![]() и
и ![]() (рис. 1). Значения этих площадей запоминаем.
(рис. 1). Значения этих площадей запоминаем.
При формировании третьего уровня в каждую точку ![]() уровня 3 возможно попасть многими путями из точек 2-го уровня (рис. 2). При этом каждому пути
уровня 3 возможно попасть многими путями из точек 2-го уровня (рис. 2). При этом каждому пути ![]() будет соответствовать свое значение суммы площадей
будет соответствовать свое значение суммы площадей
![]() . (4)
. (4)
![]() (5)
(5)
Очевидно, чем больше номер ![]() , тем больше путей могут привести в эту точку, и тем больше различных значений площадей будет соответствовать этой точке. Выберем путь в точку
, тем больше путей могут привести в эту точку, и тем больше различных значений площадей будет соответствовать этой точке. Выберем путь в точку ![]() , который соответствует минимальной площади. С этой целью для каждой точки
, который соответствует минимальной площади. С этой целью для каждой точки ![]() найдем такое
найдем такое ![]() , которое обеспечивает минимум критерия (4),
, которое обеспечивает минимум критерия (4),
![]() ,
, ![]() (6)
(6)
![]() (7)
(7)
Полученные значения ![]() ,
, ![]() запоминаем. На рисунке в качестве примера оптимальные пути для точек уровня 3 выделены красным цветом.
запоминаем. На рисунке в качестве примера оптимальные пути для точек уровня 3 выделены красным цветом.
Описанную выше процедуру формирования точек уровня 3 повторяем для уровней ![]() В результате для уровня
В результате для уровня ![]() будем иметь следующие соотношения:
будем иметь следующие соотношения:
![]() ,
, ![]() (9)
(9)
![]() (10)
(10)
Полученные значения ![]() ,
, ![]() запоминаем.
запоминаем.
Последний уровень M имеет только одну точку ![]() , попасть в которую можно из точек предыдущего уровня
, попасть в которую можно из точек предыдущего уровня ![]() (рис. 2). Причем каждому пути
(рис. 2). Причем каждому пути ![]()
![]() будет соответствовать значение площади:
будет соответствовать значение площади:
![]() (11)
(11)
Найдем единственный путь, обеспечивающий минимум критерия (11):
![]() , (12)
, (12)
![]() (13)
(13)
Используя соотношения (12), (9) и (6), пройдем весь путь по оптимальным точкам в обратном направлении:
![]() (14)
(14)
Перечисленная в (14) последовательность будет оптимальным набором точек множества ![]() , обеспечивающих минимум критерия (1).
, обеспечивающих минимум критерия (1).
Зная номера точек множества ![]() , входящих в множество
, входящих в множество ![]() , нетрудно найти оптимальное число точек между узлами
, нетрудно найти оптимальное число точек между узлами ![]() .
.
Приведенный алгоритм может быть применен в информационных системах различного назначения для «фильтрации» большого объема данных при обработке линейных объектов. В частности, маршрутов (треков), полученных с помощью автоматизированных средств записи перемещения объектов (GPS/ГЛОНАСС-приемники), для уменьшения времени обработки изображений различных линейных объектов в ГИС.
Кроме того, многие специализированные навигационные устройства позволяют загружать в память пути (треки) с ограниченным количеством точек (например, максимальное количество точек пути, которые можно загрузить в популярные устройства серии FORERUNNER производства компании GARMIN составляет 500 точек). Приведенный метод позволяет осуществлять предварительную обработку данных для загрузки в такие устройства [1]. Особенностью метода является максимальное сохранение степени кривизны исходного линейного объекта при заданном уровне фильтрации.
Рецензенты:
Загребаев Андрей Маркоянович, д.т.н., профессор, Национальный исследовательский ядерный университет (МИФИ), г. Москва.
Крянев Александр Витальевич, д.ф-м.н., профессор, Национальный исследовательский ядерный университет (МИФИ), г. Москва.
Библиографическая ссылка
Беляков А.К., Крицына Н.А., Кулябичев Ю.П., Суханов А.А. ОПТИМИЗАЦИЯ НАБОРА ИНТЕРПОЛЯЦИОННЫХ ТОЧЕК ЛИНЕЙНОГО ОБЪЕКТА НА ОСНОВЕ ПРИНЦИПОВ ДИСКРЕТНОГО ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ // Современные проблемы науки и образования. 2013. № 3. ;URL: https://science-education.ru/ru/article/view?id=9371 (дата обращения: 30.06.2026).