



В последние годы отмечается тенденция проявления особого интереса к автономным источникам энергии (далее АИЭ), подтверждением чего является появление значительного количества зарубежных и отечественных публикаций и патентов. Данный интерес объясняется тем, что с помощью малогабаритных и легких электромеханических преобразователей энергии (далее ЭМПЭ), дополненных выпрямителями, накопительными конденсаторами и преобразователями напряжения, можно обеспечивать энергией портативные мобильные устройства при отсутствии централизованной сети питания промышленной частоты. Особое внимание заслуживают ЭМПЭ колебательного движения, которые позволяют использовать окружающую нас механическую энергию вибраций, толчков и т.п. Наиболее целесообразно использовать для этих целей ЭМПЭ с постоянными магнитами [2], так как при этом нет потерь энергии на возбуждения магнитного поля, что существенно повышает КПД устройств данного типа. Так, например, автономные ЭМПЭ колебательного движения с постоянными магнитами могут служить источником питания светодиодных ламп в цехах машиностроительных предприятий при использовании энергии вибраций здания, станков. Также можно освещать мосты, преобразовывая кинетическую и потенциальную энергии моста в электрическую. Либо подзаряжать КПК, мобильный телефон во время вашей ходьбы.
На рисунке 1 представлена разработанная авторами оригинальная конструкция трехкоординатного электромеханического преобразователя (ТКЭП) [3]. Подвижная часть предлагаемого технического решения выполнена в виде двухполюсных постоянных магнитов, закрепленных на упругих стержнях. Неподвижная часть состоит из катушек, размещенных по периметру корпуса. Это позволяет ЭМПЭ обеспечивать преобразование энергии возмущений внешней среды любого направления (например, вибраций) в электрическую энергию.
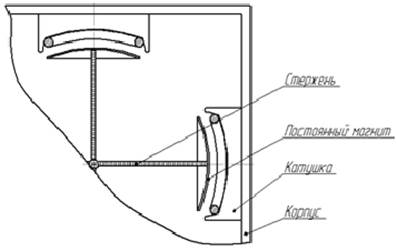
Рисунок 1. Трехкоординатный электромеханический преобразователь энергии колебательного движения
На основании теоретических исследований [4; 5] авторами был разработан и исследован ряд опытных образцов ТКЭП, исследования проводились в соответствии с ГОСТ 11828-86.
Экспериментальная установка, показанная на рисунке 2, состоит из основания (металлической плиты) с закрепленной на ней немагнитной платформой, на которой расположен испытуемый ТКЭП; двигателя постоянного тока с эксцентриситетом на роторе для возбуждения колебаний платформы; индикатора линейных перемещений для измерения амплитуды колебаний платформы; осциллографа для визуализации полученных результатов; цифрового бесконтактного тахометра (на рисунке не показан) для измерения частоты вращения двигателя.
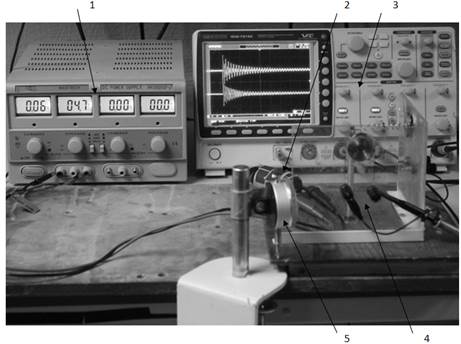
Рисунок 2. Экспериментальная установка для испытаний ТКЭП:
1 - источник вторичного питания MastechHY3005D-2; 2 – двигатель постоянного тока; 3 – цифровой осциллограф GWInstekGDS-73152; 4 – опытный образец ТКЭП; 5 – индикатор часового типа ИЧ-10.
Конструкция представленного ТКЭП состоит из подвижной и неподвижной частей. Подвижная часть выполнена в виде двухполюсных постоянных магнитов цилиндрической формы (D=30 мм, H=3 мм), изготовленных из материала NdFeB. К постоянным магнитам приклеены ферромагнитные накладки, что согласно исследованиям, представленным в [4], позволяет получить большие значения ЭДС и магнитной индукции в воздушном зазоре. Один из постоянных магнитов с ферромагнитной накладкой закреплен посредством пайки на упругом стержне, изготовленном из пружинной стали. Второй постоянный магнит с ферромагнитной накладкой закреплен посредством пайки на стальной пружине. Неподвижная часть состоит из катушек, размещенных по периметру корпуса. Катушки изготовлены из медного провода марки ПЭВ-1 0,14, с числом витков обмоток w1=w2=410 витков (w1 – число витков первой катушки, w2 – число витков второй катушки). Для обеспечения целостности катушки она пропитана цапонлаком.
Зазор между подвижной и неподвижной частью ТКЭП составляет не менее 2,8 мм. При меньшем зазоре происходит касание обмотки постоянным магнитом. Магнитная система ТКЭП выполнена из магнита марки NdFeB N40.
Экспериментальная установка работает следующим образом: c источника вторичного питания напряжение подается на двигатель постоянного тока DCMotor N3657-250-GHFVP с установленным на роторе эксцентриситетом массой 20 г. Вибрации двигателя через немагнитную платформу передаются на ТКЭП. Индикатор часового типа ИЧ-10 отображает амплитуду колебаний ТКЭП. Цифровой бесконтактный тахометрTesto 470 измеряет частоту вращения ротора. Частота колебаний платформы определяется косвенным методом:
![]() , (1)
, (1)
где ![]() – частота колебаний немагнитной платформы; n – частота вращения двигателя.
– частота колебаний немагнитной платформы; n – частота вращения двигателя.
Двухканальный цифровой осциллограф подключен к выходным клеммам обмоток ТКЭП и отображает форму сигнала ЭДС ТКЭП.
Целью экспериментальных исследований были:
- проверка полученных авторами в работах [4; 5] математических и компьютерных моделей, а также результатов их исследований;
- определение перспектив использования ТКЭП для построения автономных систем электроснабжения маломощных потребителей;
- определение направлений дальнейшего улучшения характеристик ТКЭП.
Основной характеристикой ТКЭП, определяющей его работоспособность, является выходное напряжение в установившемся режиме. Для снятия характеристик напряжения проводился ряд измерений на различных частотах и амплитудах перемещения подвижной части, в том числе при различных нагрузочных сопротивлениях. Из опробованных вариантов по критерию практической значимости и информативности был выбран диапазон частот 30- 72 Гц и амплитуда перемещения от нуля до 0,75 мм при сопротивлении нагрузки – 39, 120, 300, 600 Ом, 1 кОм. Выбор значений сопротивлений нагрузки соответствует значению внутреннего сопротивления обмоток ТКЭП (39 Ом), значению входного сопротивления аналоговых и цифровых устройств (120, 600 Ом, 1 кОм). Результаты экспериментальных исследований установившегося режима работы ТКЭП представлены на рисунке 3.
Анализ экспериментальных данных и данных компьютерного моделирования установившегося режима ТКЭП показал, что расхождение между ними не превышает 8%. Это объясняется погрешностью приборов и принятыми допущениями [5] при компьютерном моделировании.
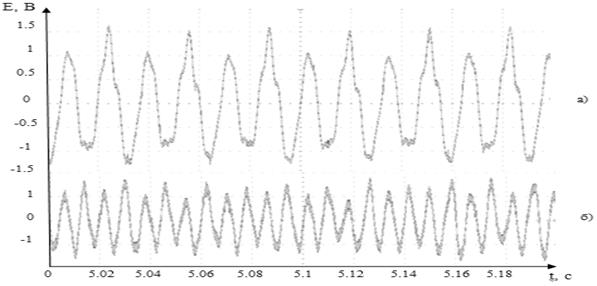
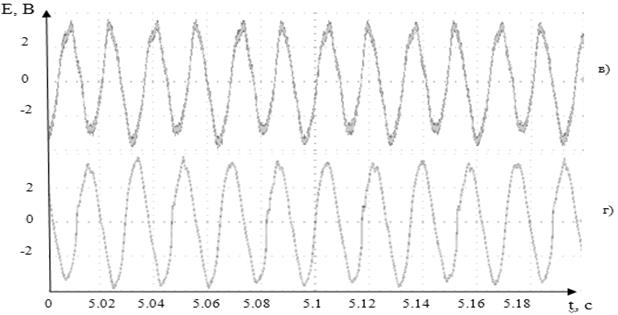
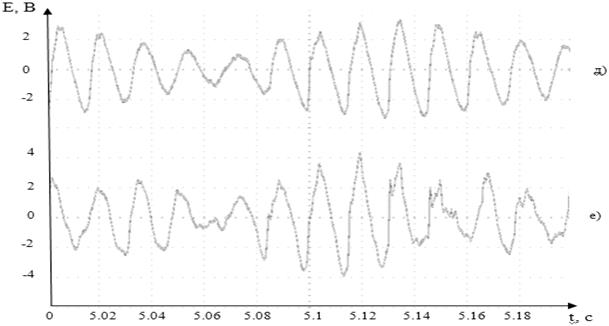
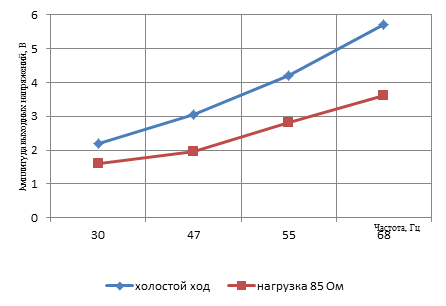
Рисунок 3. Осциллограммы ЭДС установившегося режима работы ТКЭП:
- магнитная система с пружиной: а) экспериментальные исследования при частоте 32 Гц и амплитуде 0,05 мм; в) экспериментальные исследования при частоте 56 Гц и амплитуде 0,25 мм; д) экспериментальные исследования при частоте 70 Гц и амплитуде 0,4 мм;
- магнитная система со стержнем: б) компьютерное моделирование при частоте 32 Гц и амплитуде 0,05 мм; г) компьютерное моделирование при частоте 56 Гц и амплитуде 0,25 мм; е) компьютерное моделирование при частоте 70 Гц и амплитуде 0,4 мм; ж) экспериментальные исследования при последовательном согласном подключении обмоток.
При амплитуде колебаний до 0,05 мм и частоте 32 Гц зависимость выходного напряжения ТКЭП от времени движения имеет несинусоидальный характер и при этом амплитудное значение напряжения составляет 1,52 В, а разница между минимальным и максимальным пиками составляет порядка 27% (рис. 3.3а). При этом результат компьютерного моделирования (рис. 3.3б) отличается от данных эксперимента на величину, не превышающую 2%. При увеличении амплитуды колебаний в 5 раз и частоты в 1,62 раза (рис. 3.3в) амплитудное значение выходного напряжения выросло в 1,84 раза, при этом форма сигнала стала синусоидальной, что позволяет использовать ТКЭП в качестве источника электрической энергии без каких-либо дополнительных преобразовательных элементов. Данные моделирования отличаются по форме сигнала, частоте и амплитуде на величину менее 4%. При росте частоты до значений порядка 70 Гц и амплитуды колебаний до 0,4 мм заметно увеличивается несинусоидальность выходного напряжения, разность амплитуд между соседними пиками составляет 36%,(рис. 3.3д), при этом амплитудное значение выходного напряжения достигает величин 4 В. На рисунке 3.3е представлены результаты компьютерного моделирования, отличающиеся от данных экспериментального исследования на величину порядка 8%. Отличие формы сигнала от синусоиды особого значения не имеет, так как при наличии элементов выпрямления напряжения важно именно амплитудное значение выходного напряжения. На рисунке 3.3ж показаны значения выходного напряжения при последовательном согласном соединении обмоток магнитных систем с пружиной и со стержнем при холостом ходе и при нагрузке 85 Ом. Наибольшее значение выходного напряжения 6В при холостом ходе ТКЭП, наибольший ток 0,05 А на нагрузке 85 Ом.
В результате экспериментальных исследований определено, что магнитная система со стержнем позволяет получить большие значения ЭДС (рис. 4) благодаря меньшему изменению величины воздушного зазора, большему коэффициенту упругости. К преимуществам магнитной системы с пружиной относится высокая инерционность.
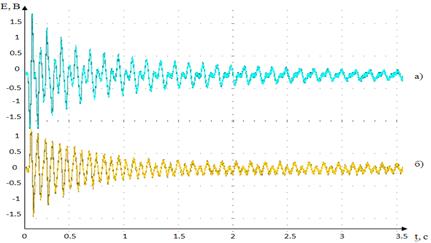
Рисунок 4. Осциллограммы мгновенных значений ЭДС динамического режима работы ТКЭП: а) магнитная система с пружиной; б) магнитная система со стержнем.
При скачкообразном изменении выходного напряжения, вследствие изменения амплитуды вибраций, по виду переходного процесса установления напряжения ТКЭП (рис. 4) возможно определить некоторые динамические характеристики методом огибающих. На рисунке 4 видно, что огибающая выходного напряжения изменяется по экспоненциальному закону, из чего следует что ТКЭП является передаточным звеном первого порядка с передаточной функцией вида ![]() , где Т – постоянная времени ТКЭП, р – оператор Лапласа. По рисунку 4 графоаналитическим способом найдены значения постоянных времени: 0,51 с – для магнитной системы с пружиной; 0,35 с - для магнитной системы со стержнем. Передаточные функции, соответственно:
, где Т – постоянная времени ТКЭП, р – оператор Лапласа. По рисунку 4 графоаналитическим способом найдены значения постоянных времени: 0,51 с – для магнитной системы с пружиной; 0,35 с - для магнитной системы со стержнем. Передаточные функции, соответственно:
![]()
![]()
Полученные результаты могут быть использованы на практике при проектировании одно-, двух- и трехкоординатных электромеханических преобразователей энергии колебательного движения.
Рецензенты:
Ураксеев М.А., д.т.н., профессор кафедры ИИТ ФГБОУ ВПО «Уфимский государственный авиационный технический университет», г. Уфа.
Гизатуллин Ф.А., д.т.н., профессор кафедры ЭМ ФГБОУ ВПО «Уфимский государственный авиационный технический университет», г. Уфа.
Библиографическая ссылка
Хайруллин И.Х., Риянов Л.Н., Вавилов В.Е., Дуракова В.С. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ТРЕХКООРДИНАТНОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ // Современные проблемы науки и образования. 2013. № 3. ;URL: https://science-education.ru/ru/article/view?id=9366 (дата обращения: 30.06.2026).