



Введение
В настоящее время находят применение преобразовательные комплексы (ПК), имеющие в своем составе инверторы с разными выходными частотами, оказывающие взаимное влияние по цепям питания постоянным напряжением. Исследование систем управления такими ПК требует наличия динамических моделей инверторов. По своей природе инверторы напряжения и тока являются непрерывно-дискретными звеньями. Наиболее развита теория инверторов как дискретных элементов систем управления. Однако построение динамической модели всего ПК с применением дискретных моделей инверторов затруднительно, что связано с несовпадением частот квантования информации, которые определяются частотами инвертирования. Ввиду этого целесообразно перейти от дискретных моделей к непрерывным «огибающим» моделям по описанной ниже методике. В конечном итоге удается получить передаточные функции инверторов как непрерывных элементов системы автоматического регулирования.
Цель исследования
Разработка методики расчета передаточных функций автономных инверторов как динамических звеньев многочастотных преобразовательных комплексов.
Методика исследования
По своей природе инверторные модули являются дискретно-непрерывными объектами. Их динамические свойства проявляются через средние за интервал между коммутациями вентилей значения токов и напряжений элементов схемы. В то же время динамические модели инверторного модуля являются дискретными, период квантования которых кратен частоте инвертирования. Однако в многочастотном ПК [4] возникают несколько частот квантования. Это существенно усложняет исследование и тем более аналитический синтез системы управления. Выход может быть найден за счёт перехода к непрерывным, «огибающим» моделям всех инверторных модулей. В результате такого перехода модель всей системы оказывается непрерывной, описывается системой дифференциальных уравнений и может исследоваться методами анализа и синтеза теории непрерывных систем.
Управляющим воздействием для инверторного модуля в рассматриваемом случае является напряжение питания инвертора. Дискретная динамическая модель инвертора имеет вид векторного разностного уравнения [3]:
![]() .
.
Здесь дискретная вектор-функция ![]() связана с непрерывной вектор-функцией переменных состояния инвертора
связана с непрерывной вектор-функцией переменных состояния инвертора ![]() формулой [6]:
формулой [6]:
![]() ,
,
где ![]() – длительность интервала симметрии, n – номер интервала от начала переходного процесса,
– длительность интервала симметрии, n – номер интервала от начала переходного процесса, ![]() есть значение напряжение на входе инвертора
есть значение напряжение на входе инвертора ![]() на n-м интервале, а матрица K имеет индивидуальный вид для каждой схемы инвертора.
на n-м интервале, а матрица K имеет индивидуальный вид для каждой схемы инвертора.
В качестве инвертора рассмотрим трехфазный автономный инвертор напряжения с активно-индуктивной нагрузкой Zн с параметрами R,L (рис. 1) [1].
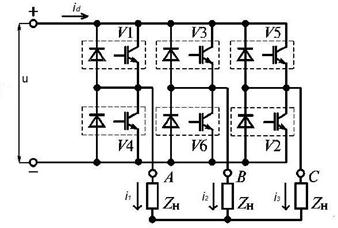
Рис. 1. Трехфазный автономный инвертор напряжения.
В этом случае для матриц и векторов имеют место формулы [5]:
Двухмерность пространства состояния ИН объясняется тем, что между фазными токами симметричной нагрузки имеется линейная связь. Для преобразования дискретной динамической модели к огибающей непрерывной модели вводится непрерывная вектор-функция y(t), совпадающая в моменты коммутаций с вектором![]()
Дифференциальное уравнение для огибающего вектора ищется в виде:
![]() (1)
(1)
Параметры непрерывной модели связаны с параметрами дискретной с помощью формул:
![]() ,
, ![]() (2)
(2)
где ![]() есть матричный логарифм, который в случае невысокой размерности находится с помощью формулы Лагранжа–Сильвестра. Расчет в данном случае дает следующее значение матрицы непрерывной модели [5]:
есть матричный логарифм, который в случае невысокой размерности находится с помощью формулы Лагранжа–Сильвестра. Расчет в данном случае дает следующее значение матрицы непрерывной модели [5]:
 ; (3)
; (3)
где
![]()
Наличие динамических моделей инверторных модулей в форме Коши позволяет перейти к модели в форме «вход-выход», что равносильно получению передаточных функций инверторного модуля от всех инерциальных переменных по его входному напряжению. Таким образом, задачей раздела является получение передаточных функций инверторов. Решение этой задачи позволяет исследовать динамику преобразовательных комплексов классическими методами теории автоматического управления.
Будем исходить из модели объекта в пространстве состояний или, в другой терминологии, в форме Коши. Общий вид такой модели:
![]()
Здесь вектор переменных состояния![]() имеет размерность n, вектор управления
имеет размерность n, вектор управления ![]() – m, размерности матриц
– m, размерности матриц ![]() и
и ![]() равны соответственно
равны соответственно ![]() и
и ![]() .
.
Перейдя к операторной форме, получим:
![]() . (4)
. (4)
Решая это уравнение относительно![]() , находим:
, находим:
![]() .
.
Итак, для того чтобы получить передаточные функции компонент вектора состояния ![]() по компонентам вектора управления
по компонентам вектора управления ![]() , необходимо обратить матрицу
, необходимо обратить матрицу ![]() , а затем умножить ее на матрицу В справа. Это означает, что искомые передаточные функции
, а затем умножить ее на матрицу В справа. Это означает, что искомые передаточные функции
![]() являются элементами матрицы:
являются элементами матрицы:
Таким образом, необходимо численным образом обратить матрицу, содержащую параметр p. Удобным методом обращения такой матрицы является метод интерполяции, описанный в [2] для расчета определителей, содержащих параметр. В данном случае он принимает следующую форму.
Заметим, что матрицу ![]() можно формально записать так:
можно формально записать так:
![]() (5)
(5)
где
Здесь ∆(p) – характеристический многочлен матрицы ![]() ,
, ![]() – союзная матрица, составленная из алгебраических дополнений для соответствующих элементов матрицы, транспонированной к матрице
– союзная матрица, составленная из алгебраических дополнений для соответствующих элементов матрицы, транспонированной к матрице ![]() .
.
Характеристический многочлен ∆(p) может быть найден любым известным методом, например методом Крылова [2]. Для нахождения элементов ![]() , т.е. алгебраических дополнений элементов
, т.е. алгебраических дополнений элементов ![]() матрицы
матрицы![]() , поступим следующим образом.
, поступим следующим образом.
Алгебраические дополнения ![]() являются многочленами некоторого порядка k (обычно k=n-1). Допустим, что число k нам известно. Зададимся произвольными неравными друг другу действительным числами pq (q=1,2,…k, k+1) и рассчитаем матрицы
являются многочленами некоторого порядка k (обычно k=n-1). Допустим, что число k нам известно. Зададимся произвольными неравными друг другу действительным числами pq (q=1,2,…k, k+1) и рассчитаем матрицы ![]() . Эти матрицы являются числовыми и поэтому их можно найти, например, методом Гаусса. Из формулы (5) ясно, что элементами этой матрицы являются числа:
. Эти матрицы являются числовыми и поэтому их можно найти, например, методом Гаусса. Из формулы (5) ясно, что элементами этой матрицы являются числа:
![]() ,
,
откуда
![]() .
.
Теперь для каждой пары i,j составим сетку
|
|
|
… |
|
… |
|
|
|
|
… |
|
… |
|
По этой сетке находим искомый многочлен ![]() , используя, например, интерполяционный многочлен Ньютона. Поскольку в данном случае интерполируемая функция является многочленом, то она в точности совпадает с
, используя, например, интерполяционный многочлен Ньютона. Поскольку в данном случае интерполируемая функция является многочленом, то она в точности совпадает с ![]() .
.
Теперь, когда будут найдены все элементы ![]() матрицы
матрицы ![]() , для нахождения передаточной матрицы
, для нахождения передаточной матрицы ![]() следует воспользоваться формулой:
следует воспользоваться формулой:
![]()
которая следует из формулы (5).
При построении передаточной функции трехфазного мостового инвертора напряжения воспользуемся обозначениями:
 ;
; ![]() .
.
Тогда матрица непрерывной модели (3) примет вид:
 .
.
Перейдем от системы уравнений огибающей модели
![]()
к её операторной форме:
![]() .
.
Разрешив операторное уравнение относительно вектора ![]() , получим:
, получим:
![]()
В результате вектор передаточных функций примет вид:
 .
.
В данном случае матрицу ![]() легко обратить аналитически. Обозначив
легко обратить аналитически. Обозначив ![]() , получим:
, получим:
 .
.
Здесь ![]() – характеристический многочлен матрицы
– характеристический многочлен матрицы ![]() :
:

Корни этого многочлена имеют вид:
![]() .
.
Интерес представляет передаточная функция для входного тока инвертора по напряжению его питания, т.е. первый элемент вектора ![]() . В стандартном виде это передаточная функция будет иметь вид:
. В стандартном виде это передаточная функция будет иметь вид:
 ;
;
Здесь:
 ;
;  ;
;
 ;
;
 .
.
В качестве другого примера приведем выражение передаточной функции для огибающей входного тока id однофазного АИТ (рис. 2) по входному напряжению инвертора u.
Рис. 2. Однофазный мостовой инвертор тока.
Выражение передаточной функции для огибающей входного тока однофазного АИТ id по входному напряжению u в общей форме имеет вид:

Параметры передаточной функции зависят от параметров схемы и нагрузки. Их зависимости от полного сопротивления нагрузки Z (при cos φ=0.7) и от cos φ (при Z=1 Ом) приведены в таблицах 1 и 2. Остальные параметры фиксированы: коммутирующая емкость С=400 мкФ, частота выходного напряжения 400 Гц, параметры входного реактора: Ld=0.01 Гн, Rd =0.01 Ом.
Таблица 1 – Зависимость параметров передаточной функции ИТ от сопротивления нагрузки при cos φ=0.7
|
Z, Ом |
b1, 105 |
b2, 108 |
a1, 102 |
а2, 105 |
а3, 108 |
k |
|
1 |
1,601 |
1,201 |
24,63 |
16,75 |
1,551 |
0,744 |
|
2 |
2,596 |
1,569 |
24,63 |
17,96 |
3,071 |
0,511 |
|
3 |
3,727 |
2,082 |
24,63 |
19,16 |
4,574 |
0,455 |
|
4 |
5,017 |
2,768 |
24,63 |
20,36 |
6,061 |
0,457 |
|
5 |
6,493 |
3,662 |
24,63 |
21,56 |
7,533 |
0,486 |
|
7 |
10,15 |
6,265 |
24,63 |
23,59 |
10,43 |
0,601 |
|
8 |
12,44 |
8,102 |
24,63 |
25,14 |
10,85 |
0,684 |
|
9 |
15,11 |
10,041 |
24,63 |
26,34 |
13,26 |
0,786 |
|
10 |
18,28 |
13,33 |
24,63 |
27,53 |
14,65 |
0,91 |
Таблица 2 – Зависимость параметров передаточной функции ИТ от cos φ при z=1 Ом
|
cos φ |
b1, 104 |
b2, 106 |
а1, 102 |
а2, 105 |
а3, 107 |
k |
|
0,3 |
3,628 |
5,712 |
7,91 |
2,615 |
4,127 |
0,138 |
|
0,4 |
5,38 |
16,13 |
10,97 |
4,103 |
5,882 |
0,274 |
|
0,5 |
7,69 |
33,52 |
14,51 |
6,438 |
8,075 |
0,415 |
|
0,6 |
10,94 |
63,6 |
18,85 |
10,2 |
11,04 |
0,576 |
|
0,7 |
16,01 |
102,1 |
24,63 |
16,75 |
15,51 |
0,774 |
|
0,8 |
25,14 |
204,5 |
33,5 |
30,1 |
23,56 |
1,038 |
|
0,9 |
46,64 |
637,1 |
51,88 |
69,66 |
44,88 |
14,19 |
Таким образом, для инвертора, имеющего указанные выше параметры входного реактора инвертора, коммутирующей емкости и частоту выходного напряжения и при активно-индуктивной нагрузки Z=1 Ом, cosφ=0.7, 400 Гц передаточная функция имеет вид:
 .
.
Представляет интерес оценка трудоемкости вычислительных операций, выполнение которых необходимо при построении передаточных функций инверторов. В этой связи следует отметить, что в вычислительном отношении алгоритм, предлагаемый в настоящей работе, неоднороден. Это значит, что он включает ряд процедур из разных разделов вычислительной математики, которые в существующих стандартных пакетах (Matlab, Mathcad) состыковать в единый вычислительный процесс крайне затруднительно. По этой причине авторами разработана пользовательская программа, реализующая указанный выше алгоритм.
Для более сложных преобразовательных модулей, чем рассмотренные выше, наибольшие вычислительные трудности вызывает расчет матричного логарифма![]() . Такими модулями, в частности, являются сложные мостовые схемы инверторов тока с расщепленной конденсаторной батареей на выходе. Применение формулы Лагранжа-Сильвестра в этих случаях может приводить к переполнению и потере точности при вычислении высоких степеней матрицы D, поскольку порядок может быть больше десяти. В этом случае приходится применять приближенный метод, основанный на матричном варианте аппроксимации Паде [7].
. Такими модулями, в частности, являются сложные мостовые схемы инверторов тока с расщепленной конденсаторной батареей на выходе. Применение формулы Лагранжа-Сильвестра в этих случаях может приводить к переполнению и потере точности при вычислении высоких степеней матрицы D, поскольку порядок может быть больше десяти. В этом случае приходится применять приближенный метод, основанный на матричном варианте аппроксимации Паде [7].
Заключение
Научная и практическая новизна работы состоит в разработке методики перехода от исходных дискретных динамических моделей автономных инверторов к непрерывным динамическим моделям в форме Коши и последующем переходе к моделям инверторов в форме «вход-выход» с целью их использования при исследовании динамики многочастотных ПК классическими методами теории автоматического управления. Разработанная методика продемонстрирована на примерах расчета передаточных функций однофазного инвертора тока и трехфазного мостового инвертора напряжения при активно-индуктивной нагрузке.
Рецензенты:
Коваль Владимир Александрович, доктор технических наук, профессор кафедры «Техническая кибернетика и информатика», Саратовский государственный технический университет имени Гагарина Ю.А., г. Саратов.
Иващенко Владимир Андреевич, доктор технических наук, старший научный сотрудник Института проблем точной механики и управления РАН, г. Саратов.
Библиографическая ссылка
Радионова М.В., Астапович Ю.М., Митяшин Н.П. ПОСТРОЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ АВТОНОМНЫХ ИНВЕРТОРОВ // Современные проблемы науки и образования. 2013. № 1. ;URL: https://science-education.ru/ru/article/view?id=8307 (дата обращения: 04.08.2026).