



Введение. Известный способ лазерного наведения рабочей головки манипулятора лесозаготовительной машины (ЛЗМ) на ствол дерева оператором из кабины имеет существенные недостатки в управлении [5]. Оператору необходимо предварительно указать, навести на объект лазерный дальномер, а затем выполнить манипуляции джойстиком по спиливанию дерева. Используя лазерный дальномер наведения манипулятора, автор не учел временные задержки, оказывающие «транспортное» запаздывание системы управления рабочей головкой ЛЗМ. Оператору приходится делать лишнюю операцию, даже, если лазерный дальномер поставить на стрелу манипулятора и синхронизировать с системой управления. Еще автор предлагает оператору лазерным дальномером указать две точки на стволе дерева – комель и вершину. Предлагаемая операция отвлекает оператора и приведет к снижению производительности ЛЗМ.
Цель работы – проанализировать существующие системы управления наведения рабочей головки на дерево для увеличения производительность ЛЗМ. Автоматизация управления рабочей головкой манипулятора с использованием RFID меток оптимизирует работу оператора и приведет к увеличению производительности, особенно при выборочной и рубке ухода. Автоматизированный способ наведения манипулятора сокращает время на подъезд к дереву, на приближение рабочей головки к стволу дерева. Оператору требуется осуществить выбор нужного дерева на карте монитора из предложенного списка экспертной системы. Выдаваемый список деревьев координируется экспертной системой с учетом координат навигационной системой GPS или Glonass. Данная система способствует экологической обстановке в лесных массивах, способствует сохранности деревьев, т.е. меньшей повреждаемости стволов деревьев во время лесопиления [1]. Система повышает производительность труда оператора ЛЗМ, избавляет его от лишних действий, например, по нахождению отведенного к рубке дерева, и подскажет, как лучше поставить машину.
Материал и методы исследования. Специальные радиочастотные датчики заранее устанавливают на стволах деревьев, например, во время лесоотвода, информация с которых считывается сканером с монитором, который находится в кабине ЛЗМ. Радиочастотные метки, расположенные на стволах деревьев, содержат необходимую информацию о дереве: порода, возраст, координату нахождения дерева и пр.
Структурная схема системы автоматизированного наведения рабочей головки манипулятора ЛЗМ показана на рис. 1. Система состоит из радиочастотного датчика (метки), установленного на стволе дерева, манипулятора с рабочей головкой, установленного на шасси ЛЗМ, и кабины оператора. Сканирующее устройство расположено в кабине оператора для обнаружения и распознания радиочастотного информации с датчика. Сканирующее устройство связано монитором и пультом оператора, со штатной системой управления манипулятором и рабочей головкой.
Функционирует система наведения рабочей головки следующим образом. Информация о деревьях лесного массива при лесоотводе заносится в базу данных, а соответствующие номера деревьев помечаются на вырубку. Сформированная база данных является неким документом для производства порубочных работ оператором ЛЗМ. При выполнении лесосечных работ база данных заносится в бортовой компьютер ЛЗМ.
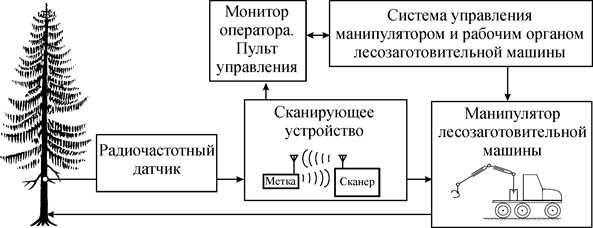
Рис. 1. Структурная схема автоматизированной экспертной системы наведения рабочей головки манипулятора ЛЗМ на дерево
Приближение рабочей головки манипулятора к дереву, помеченного в базе данных на вырубку, выдаст оператору ЛЗМ соответствующую информацию. На мониторе у оператора высвечивается карта с отмеченными деревья с RFID датчиками в виде цветных точек: красные – запрещены к спиливанию, зеленые – разрешены на спиливание. Количество деревьев на карте отмечаются только те, которые входят в зону действия манипулятора. Это производится путем вычисления по соответствующему алгоритму. Цвет и форма точки указывают на геометрические размеры и породу дерева. При наведении рабочей головки манипулятора ЛЗМ на помеченное дерево в базе данных у оператора на мониторе метка становится активной, увеличивается в размерах или мигает и появляется информация о дереве: порода, возраст, высота, диаметр и пр. Таким образом, оператор имеет полную информацию о дереве и принимает решение, как распилить и куда положить сортимент.
Принятие решения оператором из предлагаемых вариантов контроллер автоматизированной системы управления по специально разработанному алгоритму наводит рабочую головку манипулятора на ствол дерева. Управляющая программа контроллера разработана по проведенным использованиям звеньев манипулятора ЛЗМ и расчетным данным, приведенным в работе [2]. Контроллер рассчитывает скорости перемещения элементов (звеньев) манипулятора с тем, чтобы помочь оператору быстро и без потерь времени – подвести рабочую головку с захватами на выбранный ствол дерева и на нужной высоте, с учетом рельефа местности. На рис. 2 представлены результаты расчетов моделирования ускорения захвата при различных линейных скоростях движения звена и начальных углах, которые использованы в программе управления манипулятором ЛЗМ. Порядок расчета представлен в работе [2].
На основе полученных данных о движения условной точки рабочей головки захвата построены алгоритмы программ для управляющего контроллера манипулятором ЛЗМ. Наилучшим вариантом совместной работы звеньев является вращение стрелы при возможном выдвижении рукояти (рис. 2, кривые 1 и 4). Технологические возможности манипулятора можно оценить после исследования характера зон обслуживания манипулятора при различных вариациях его перемещения в лесном массиве.
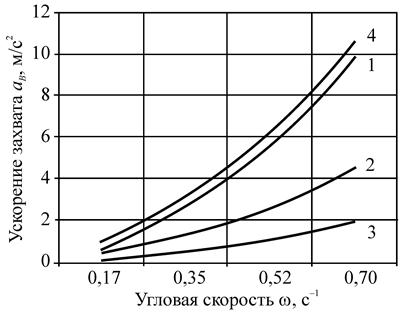
Рис. 2. Расчетные модельные кривые ускорения захвата манипулятора при начальных углах φ = 60°, ψ = 180° и линейной скорости U = 1 м/с: 1 – стрела и рукоять вращаются и не выдвигаются; 2 – стрела вращается, рукоять выдвигается и не вращается; 3 – стрела неподвижна, рукоять вращается; 4 – стрела вращается, рукоять вращается и выдвигается
Фрагмент алгоритма управления одним звеном манипулятора ЛЗМ показан на рис. 3. Поступающие данные от оператора в контроллер анализируются, т.е. производится определенный расчет координаты перемещения рабочей головки манипулятора по предельным углам наклона и поворота звеньев манипулятора. Сравниваются с данными оператора, после этого производится расчет оптимальных ускорений и скоростей, а затем контроллер вырабатывает управляющее воздействие на гидроцилиндр звена манипулятора ЛЗМ.
Управляющая программа в контроллере выполнена в виде отдельного цикла, в который вставлены подпрограммы управления отдельными звеньями манипулятора ЛЗМ. Поэтому система оказывается самостоятельной, т.е. автономной от системы выравнивая шасси ЛЗМ на не ровном рельефе почвы, например, на слоне.
Важным элементом алгоритма управления манипулятором ЛЗМ являются данные, поступающие с радиочастотной метки (рис. 3). Сканер считывает данные с радиочастотной метки, обрабатывает их и передает их в контроллер, где производится расчет координаты метки.
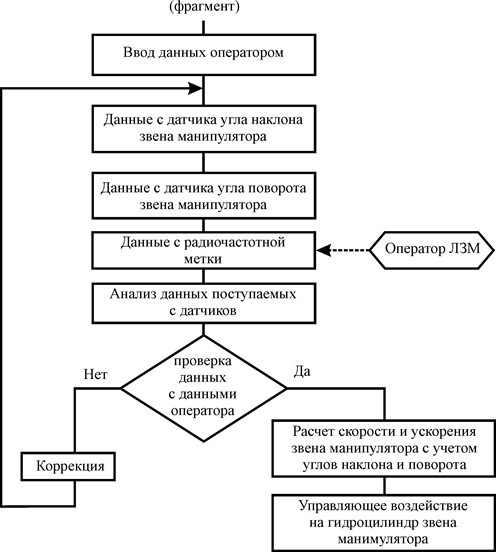
Рис. 3. Алгоритм управления работой манипулятора
Расчетная схема координаты RFID датчика показана на рис. 4. По сигналам со сканеров S1 и S2, расположенных друг от друга на расстоянии R, в контроллере производится расчет расстоянии r1, r2 от метки М и высота h. Трехмерная система координат расположения RFID датчика М и сканирующего устройства S1, S2, необходима для объяснения принципа работы алгоритма управления манипулятором ЛЗМ. Это связано с тем, что рельеф почвы в лесу имеет уклоны, впадины, холмики и пр., то контроллер должен вычислить координату для перемещения рабочей головки манипулятора и перемесить ее в заданную меткой точку оптимальным образом.
Расчет координаты RFID датчика производится по поступившему сигналу. Положение координаты сканера S1 в момент времени t определяем по заданному вектору r1 = [x1, y1, z1]T, а положение S2 определяем вектор r2 = [x2, y2, z2]T, как величины обратные координаты точки расположения RFID датчика. Таким образом, векторы r1 и r2 определяют в момент времени t текущее расстояние R = ║ r1 – r2 ║ между S1 и S2 в выбранной системе координат.
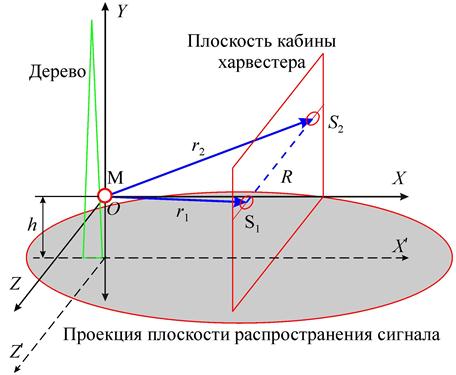
Рис. 4. Пространственная схема координат сканирующего устройства:
М – радиочастотная метка; r1 и r2 – расстояние (радиус распространения сигнала) от М до сканера; h – высота расположения М; S1 и S2 – сканирующее устройство с двумя приемниками сигнала от М; R – расстояние между точками S1 и S2
Доминирующий вклад в погрешность измерения расстояния вносят канал распространения радиоволн, возникающих в условиях леса отражения от близкорасположенных стволов деревьев, собственный шум метки (передатчика) и сканера (приемника). Для точной оценки времени прихода сигнала (дальности) использовали методологию, описанную в [3]. Результат измерений сводится к оценке всех трех координат точки М.
Предлагаемый синтез алгоритма расчета координат выполним на основе Марковской теории нелинейной фильтрации [4]. Введем трехмерный вектор переменных состояния:
хТ = [x1, х2, х3] = [x2, y2, z2], (1)
координаты являются неизвестными случайными величинами. Для неподвижного на интервале измерения r в дискретном времени для вектора х справедлива система разностных уравнений:
х(k) = х(k–1), k = 1, 2, … . (2)
Случайные начальные условия для (2) определены заданием априорной плотности распределения вероятностей W[x(0)], где в качестве источника информации о состоянии используются измерения дальности, объединенные в вектор наблюдения:
z(k) = ║х(k) – r1(k)║ + n(k), (3)
где n(k) – одномерный вектор ошибок измерений.
Применяя формулу Байеса с учетом Марковских свойств состояний (2) и наблюдений (3), можно записать уравнения, позволяющие рекурсивно обновлять апостериорную плотности распределения вероятностей по мере поступления наблюдений [6]. Для квадратичной функции потерь оптимальная байесовская оценка хˆ(k) текущего состояния x(k) реализуется в виде оператора апостериорного среднего.
Задачей экспериментальных исследований является определение ошибки измерения расстояния. Исследование проводили на местности в горизонтальной плоскости с углом от –90о до +90о с шагом 45о. Расчет ошибок с определением координат выполнено методом статистических испытаний при усреднении по 100 независимых реализаций гауссовых ошибок в канале наблюдений и различных начальных условий для (2). При движении сканера в пределах действия радиочастотной метки радиусом 100 м, со скоростью 5 км/ч ошибки измерений полагали статистически независимыми во времени с нулевым средним и среднеквадратичным отклонением 30 мм. Интервал сканирования, т.е. поступление данных 1 с. Расстояние R между точками S1 и S2 выбрали 1 м, длину волны – 130 мм. Произведен расчет максимальной ошибки при определении места расположения радиочастотной метки М (рис. 5).
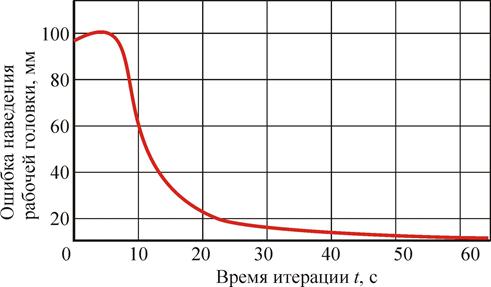
Рис. 5. Итерационная ошибка определения места расположения метки М
Результаты исследования и их обсуждение. В исследованиях использовали радиочастотную метку с диаметром антенны 25 мм. Результаты итерационных исследований в горизонтальной плоскости приведены на рис. 5. Расчет плотности распределения вероятностей произведен при 8000 точек. Результаты итерации в вертикальной плоскости в работе не представлены по причине, что первоначальная задача исследований заключалась в поиске места нахождения метки в горизонтальной плоскости, чтобы навести рабочий орган манипулятора ЛЗМ на дерево.
Выводы. Полученные результаты позволяют определять координаты дерева с точностью, соизмеримой с размерами RFID датчика за время 30–35 сек. При использовании более коротких волн, например 10–12 мм, можно надеяться на более высокую точность измерения координаты объекта. Для снижения времени вычисления необходимо поработать по снижению шумов.
Рецензенты:
Залесов Сергей Вениаминович, д.с-х.н., профессор, заведующий кафедрой лесоводства, ФГБОУ ВПО Уральский государственный лесотехнический университет, г. Екатеринбург.
Лисиенко Владимир Георгиевич, д.т.н., профессор, УрФУ имени первого Президента России, г. Екатеринбург.
Библиографическая ссылка
Санников С.П., Серков П.А., Шипилов В.В. СИСТЕМА АВТОМАТИЗИРОВАННОГО НАВЕДЕНИЯ РАБОЧЕЙ ГОЛОВКИ МАНИПУЛЯТОРА НА ДЕРЕВО // Современные проблемы науки и образования. 2013. № 1. ;URL: https://science-education.ru/ru/article/view?id=8254 (дата обращения: 04.08.2026).